

位置式PID算法和增量式PID算法的差异
电子说
1.4w人已加入
描述
1 前言
控制系统通常根据有没有反馈会分为开环系统和闭环系统,在闭环系统的控制中,PID算法非常强大,其三个部分分别为;
-
P:比例环节; -
I:积分环节; -
D:微分环节;
PID算法可以自动对控制系统进行准确且迅速的校正,因此被广泛地应用于工业控制系统。
2 开环控制
首先来看开环控制系统,如下图所示,隆哥蒙着眼,需要走到虚线旗帜所表示的目标位置,由于缺少反馈(眼睛可以感知当前距离和位置,由于眼睛被蒙上没有反馈,所以这也是一个开环系统),最终隆哥会较大概率偏离预期的目标,可能会运行到途中实线旗帜所表示的位置。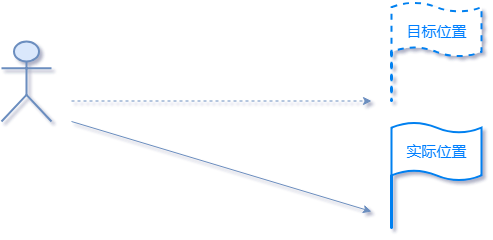
开环系统的整体结构如下所示;

-
Input:告诉隆哥目标距离的直线位置(10米); -
Controller:隆哥大脑中计算出到达目标所需要走多少步; -
Process:双腿作为执行机构,输出了相应的步数,但是最终仍然偏离了目标;
3 闭环控制
所以为了准确到达目标位置,这里就需要引入反馈,具体如下图所示;

-
第一步
Input:告诉隆哥目标距离的直线位置(10米); -
第二步
Controller:隆哥大脑中计算出到达目标所需要走多少步; -
第三步
Process:双腿作为执行机构,输出了相应的步数,但是最终仍然偏离了目标; -
第四步
Feedback:通过视觉获取到目前已经前进的距离,(比如前进了2米,那么还有8米的偏差); -
第五步
err:根据偏差重新计算所需要的步数,然后重复上述四个步骤,最终隆哥达到最终的目标位置。
4 PID
4.1 系统架构
虽然在反馈系统下,隆哥最终到达目标位置,但是现在又来了新的任务,就是又快又准地到达目标位置。所以这里隆哥开始采用PID Controller,只要适当调整P,I和D的参数,就可以到达目标位置,具体如下图所示;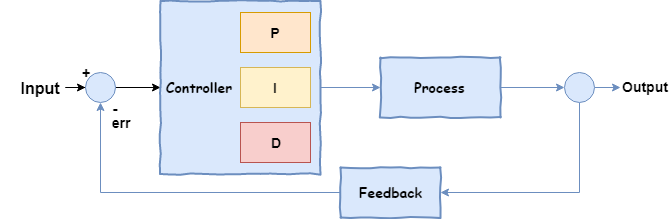
隆哥为了最短时间内到达目标位置,进行了不断的尝试,分别出现了以下几种情况;
- 跑得太快,最终导致冲过了目标位置还得往回跑;
- 跑得太慢,最终导致到达目标位置所用时间太长;
- 第一步:得到与目标位置的距离偏差(比如最开始是10米,后面会逐渐变小);
- 第二步:根据误差,预估需要多少速度,如何估算呢,看下面几步;
P比例则是给定一个速度的大致范围,满足下面这个公式;
因此比例作用相当于某一时刻的偏差(
比例作用
err)与比例系数的乘积,具体如下所示;比例作用
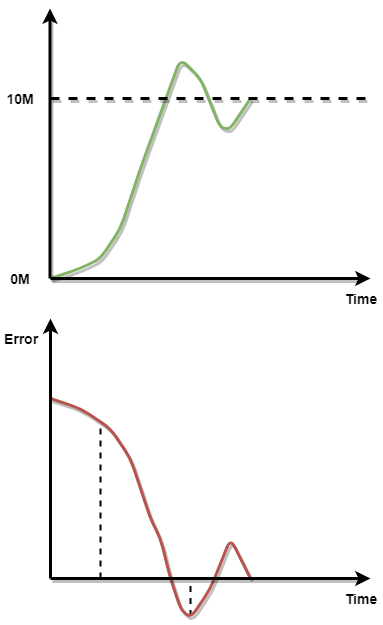
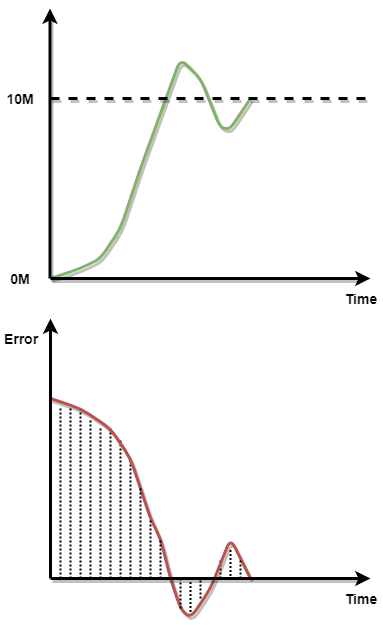
绿色线为上述例子中从初始位置到目标位置的距离变化;红色线为上述例子中从初始位置到目标位置的偏差变化,两者为互补的关系;
I积分则是误差在一定时间内的和,满足以下公式;
如下图所示;
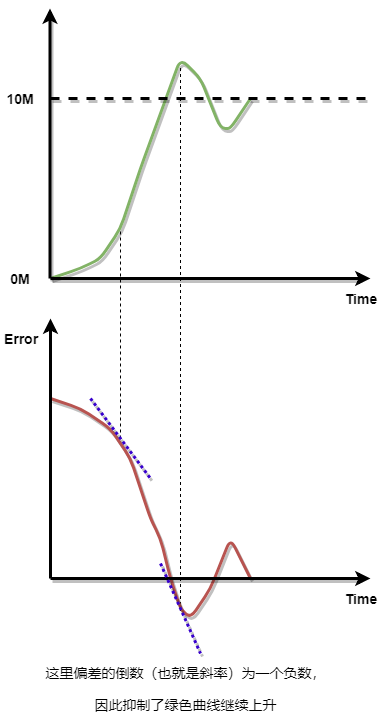
D微分则是误差变化曲线某处的导数,或者说是某一点的斜率,因此这里需要引入微分;
综上,,分别增加其中一项参数会对系统造成的影响总结如下表所示; 参数 上升时间 超调量 响应时间 稳态误差 稳定性
| Kp | 减少 | 增加 | 小变化 | 减少 | 降级 |
| Ki | 减少 | 增加 | 增加 | 消除 | 降级 |
| Kd | 微小的变化 | 减少 | 减少 | 理论上没有影响 | 小,稳定性会提升 |
4.2 理论基础
上面扯了这么多,无非是为了初步理解PID在负反馈系统中的调节作用,下面开始推导一下算法实现的具体过程;PID控制器的系统框图如下所示;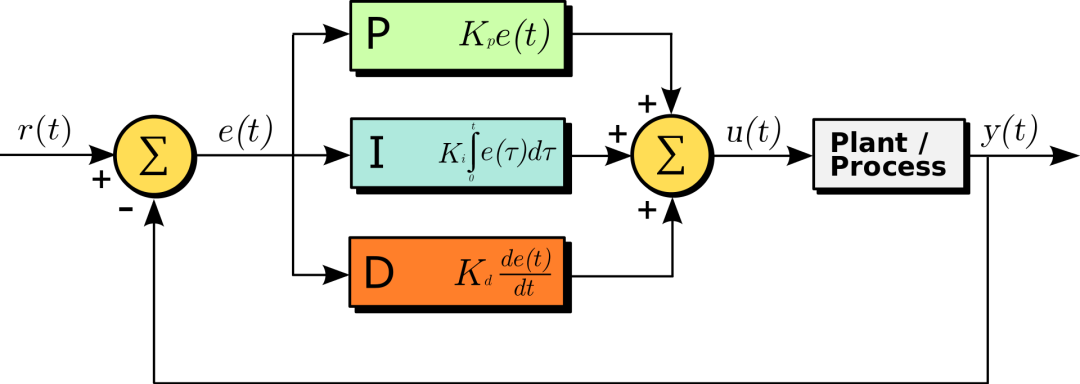
图片来自Wiki
因此不难得出输入和输出的关系;

是比例增益;是积分增益;是微分增益;
4.3 离散化
在数字系统中进行PID算法控制,需要对上述算法进行离散化;假设系统采样时间为则将输入序列化得到;
将输出序列化得到;

- 比例项:离散化
- 积分项:
- 微分项:

将式①再做一下简化;
最终得到增量式PID的离散公式如下:

4.4 伪算法
这里简单总结一下增量式PID实现的伪算法;previous_error := 0 //上一次偏差 integral := 0 //积分和 //循环 //采样周期为dt loop: //setpoint 设定值 //measured_value 反馈值 error := setpoint − measured_value //计算得到偏差 integral := integral + error × dt //计算得到积分累加和 derivative := (error − previous_error) / dt //计算得到微分 output := Kp × error + Ki × integral + Kd × derivative //计算得到PID输出 previous_error := error //保存当前偏差为下一次采样时所需要的历史偏差 wait(dt) //等待下一次采用 goto loop
5 C++实现
这里是增量式PID算法的C语言实现;pid.cpp
#ifndef _PID_SOURCE_ #define _PID_SOURCE_ #include #include #include "pid.h" using namespace std; class PIDImpl { public: PIDImpl( double dt, double max, double min, double Kp, double Kd, double Ki ); ~PIDImpl(); double calculate( double setpoint, double pv ); private: double _dt; double _max; double _min; double _Kp; double _Kd; double _Ki; double _pre_error; double _integral; }; PID::PID( double dt, double max, double min, double Kp, double Kd, double Ki ) { pimpl = new PIDImpl(dt,max,min,Kp,Kd,Ki); } double PID::calculate( double setpoint, double pv ) { return pimpl->calculate(setpoint,pv); } PID::~PID() { delete pimpl; } /** * Implementation */ PIDImpl::PIDImpl( double dt, double max, double min, double Kp, double Kd, double Ki ) : _dt(dt), _max(max), _min(min), _Kp(Kp), _Kd(Kd), _Ki(Ki), _pre_error(0), _integral(0) { } double PIDImpl::calculate( double setpoint, double pv ) { // Calculate error double error = setpoint - pv; // Proportional term double Pout = _Kp * error; // Integral term _integral += error * _dt; double Iout = _Ki * _integral; // Derivative term double derivative = (error - _pre_error) / _dt; double Dout = _Kd * derivative; // Calculate total output double output = Pout + Iout + Dout; // Restrict to max/min if( output > _max ) output = _max; else if( output < _min ) output = _min; // Save error to previous error _pre_error = error; return output; } PIDImpl::~PIDImpl() { } #endif
pid.h
#ifndef _PID_H_ #define _PID_H_ class PIDImpl; class PID { public: // Kp - proportional gain // Ki - Integral gain // Kd - derivative gain // dt - loop interval time // max - maximum value of manipulated variable // min - minimum value of manipulated variable PID( double dt, double max, double min, double Kp, double Kd, double Ki ); // Returns the manipulated variable given a setpoint and current process value double calculate( double setpoint, double pv ); ~PID(); private: PIDImpl *pimpl; }; #endif
pid_example.cpp
#include "pid.h" #include int main() { PID pid = PID(0.1, 100, -100, 0.1, 0.01, 0.5); double val = 20; for (int i = 0; i < 100; i++) { double inc = pid.calculate(0, val); printf("val:% 7.3f inc:% 7.3f ", val, inc); val += inc; } return 0; } 编译并测试;
g++ -c pid.cpp -o pid.o # To compile example code: g++ pid_example.cpp pid.o -o pid_example
6 总结
以上内容总结了PID控制器算法在闭环系统中根据偏差变化的具体调节作用,每个环节可能对系统输出造成什么样的变化,给出了位置式和增量式离散PID算法的推导过程,并给出了位置式算法的C++程序实现。
1 什么是增量式PID?
先看一下增量式PID的离散公式如下:
:比例系数 :积分系数 :微分系数 :偏差
对于所谓的位置式,增量式的算法,这两者只是在算法的实现上的存在差异,本质的控制上对于系统控制的影响还是相同,单纯从输入和输出的角度来比较,具体如下表所示;

这里简单的说明一下;
- 位置式:位置式算法较为简单,直接输入当前的偏差 ,即可得到输出;
- 增量式:增量式算法需要保存历史偏差,,即在第次控制周期时,需要使用第和第次控制所输入的偏差,最终计算得到 ,此时,这还不是我们所需要的PID输出量;所以需要进行累加;
不难发现第一次控制周期时,即时;
由以上公式我们可以推导出下式;
所以可以看出,最终PID的输出量,满足以下公式;
可见增量式算法,就是所计算出的PID增量的历史累加和;
2 举个例子
2.1 位置式PID
下面从一个简单的例子中去理解一下增量式PID,这里依然举一个不是很恰当的例子;如果是位置式PID算法的话:
- 隆哥对一个直流电机进行调速,设定了转速为 1000;
- 这时由于反馈回来的速度和设定的速度偏差为 ;
- 经过位置式PID计算得到;
- 作为Process的输入值(可以是PWM的占空比),最终Process输出相应的PWM驱动直流电机;
- 反馈装置检测到电机转速,然后重复以上步骤;
整体框图如下所示;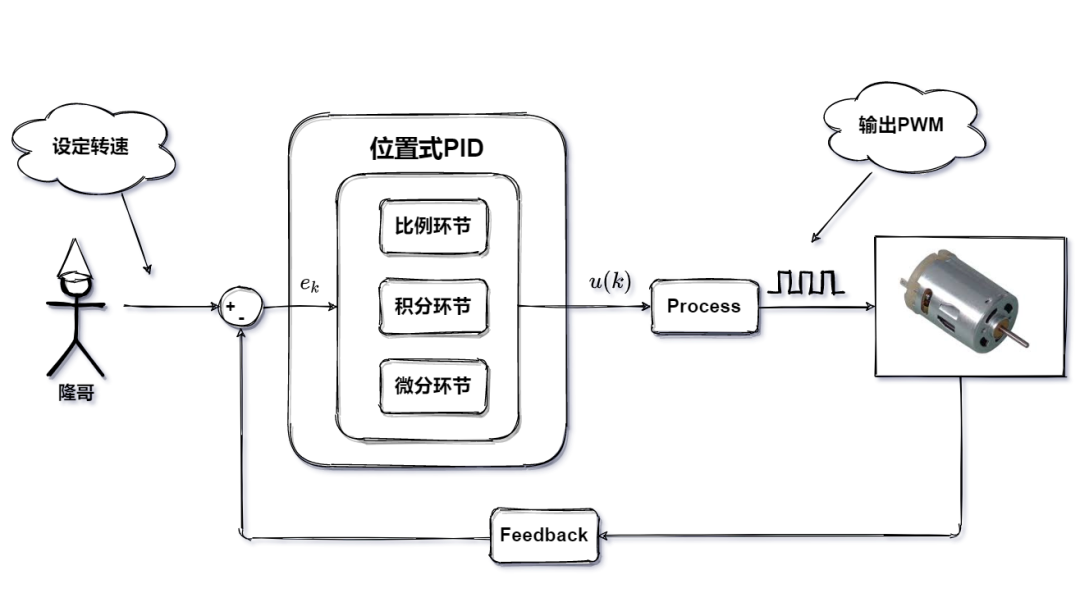
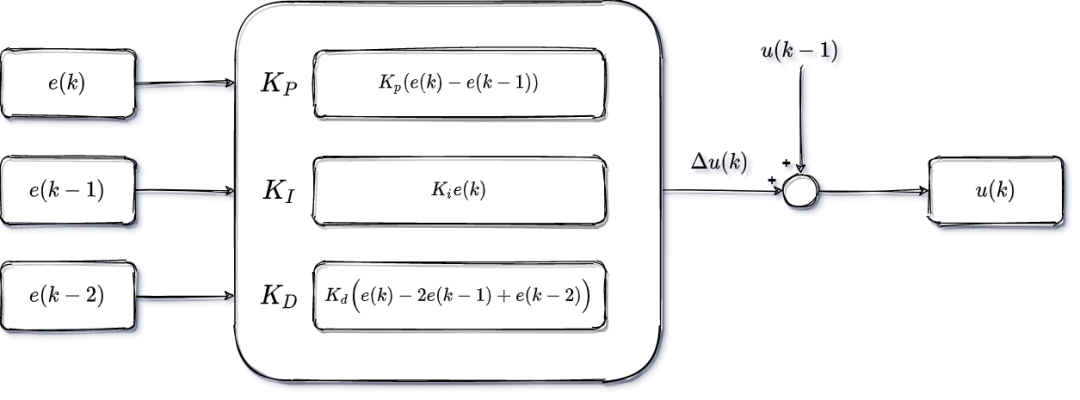
2.2 增量式PID
对于增量式PID来说;
- 隆哥对一个直流电机进行调速,设定了转速为 1000;
- 这时由于反馈回来的速度和设定的速度偏差为 ,系统中保存上一次的偏差和上上次的偏差,这三个输入量经过增量PID计算得到;
- 系统中还保存了上一次的PID输出的,所以加上增量,就是本次控制周期的PID输出——;
- 作为Process的输入值(可以是PWM的占空比),最终Process输出相应的PWM驱动直流电机;
- 反馈装置检测到电机转速,然后重复以上步骤;
整体框图如下所示;
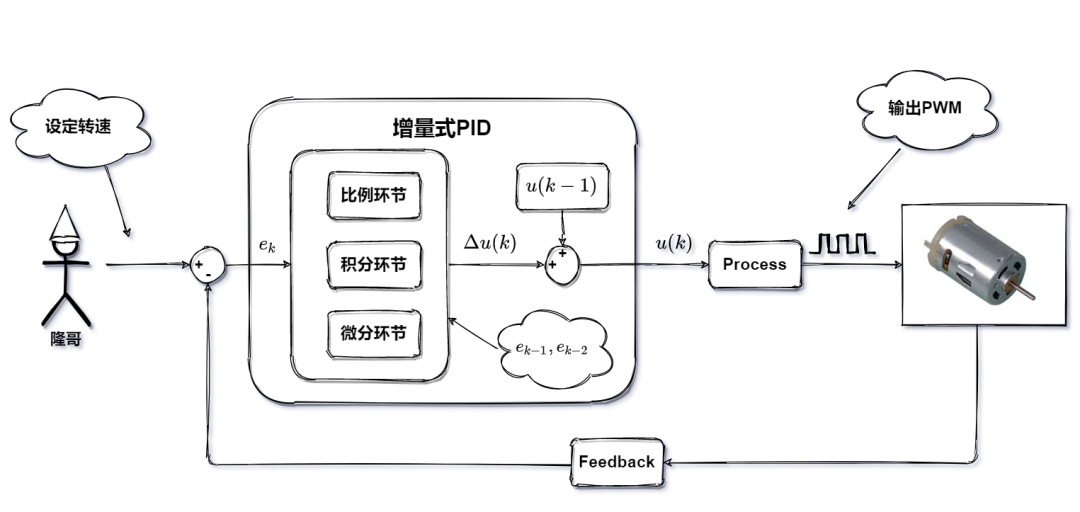
所以这里不难发现,所谓增量式PID,它的特点有:
- 需要输入历史的偏差值;
- 计算得到的是PID输出增量,因此每一次需要累加历史增量最为当前的PID输出;
下面简单介绍一下如何实现增量式PID算法;
3 伪算法
previous02_error := 0 //上上次偏差
previous01_error := 0 //上一次偏差
integral := 0 //积分和
pid_out := 0 //pid增量累加和
//循环
//采样周期为dt
loop:
//setpoint 设定值
//measured_value 反馈值
error := setpoint − measured_value //计算得到偏差
proportion := error - previous01_error //计算得到比例输出
integral := error × dt //计算得到积分累加和
derivative := (error − 2*previous01_error + previous02_error) / dt //计算得到微分
pid_delta := Kp × error + Ki × integral + Kd × derivative //计算得到PID增量
pid_out := pid_out + pid_delta //计算得到PID输出
//保存当前的偏差和上一次偏差作为下一次采样所需要的历史偏差
previous02_error := previous01_error
previous01_error := error //保存当前偏差为下一次采样时所需要的历史偏差
wait(dt) //等待下一次采用
goto loop
4 C语言实现
这里直接使用了TI公司的PID算法,做了积分抗饱和;具体可以参考controlSUITElibsapp_libsmotor_controlmath_blocksv4.2pid_grando.h
具体代码如下所示;
pid_grando.h
/* =================================================================================
File name: PID_GRANDO.H
===================================================================================*/
#ifndef __PID_H__
#define __PID_H__
typedef struct { _iq Ref; // Input: reference set-point
_iq Fbk; // Input: feedback
_iq Out; // Output: controller output
_iq c1; // Internal: derivative filter coefficient 1
_iq c2; // Internal: derivative filter coefficient 2
} PID_TERMINALS;
// note: c1 & c2 placed here to keep structure size under 8 words
typedef struct { _iq Kr; // Parameter: reference set-point weighting
_iq Kp; // Parameter: proportional loop gain
_iq Ki; // Parameter: integral gain
_iq Kd; // Parameter: derivative gain
_iq Km; // Parameter: derivative weighting
_iq Umax; // Parameter: upper saturation limit
_iq Umin; // Parameter: lower saturation limit
} PID_PARAMETERS;
typedef struct { _iq up; // Data: proportional term
_iq ui; // Data: integral term
_iq ud; // Data: derivative term
_iq v1; // Data: pre-saturated controller output
_iq i1; // Data: integrator storage: ui(k-1)
_iq d1; // Data: differentiator storage: ud(k-1)
_iq d2; // Data: differentiator storage: d2(k-1)
_iq w1; // Data: saturation record: [u(k-1) - v(k-1)]
} PID_DATA;
typedef struct { PID_TERMINALS term;
PID_PARAMETERS param;
PID_DATA data;
} PID_CONTROLLER;
/*-----------------------------------------------------------------------------
Default initalisation values for the PID objects
-----------------------------------------------------------------------------*/
#define PID_TERM_DEFAULTS {
0,
0,
0,
0,
0
}
#define PID_PARAM_DEFAULTS {
_IQ(1.0),
_IQ(1.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0),
_IQ(1.0),
_IQ(-1.0)
}
#define PID_DATA_DEFAULTS {
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0)
}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_MACRO(v)
/* proportional term */
v.data.up = _IQmpy(v.param.Kr, v.term.Ref) - v.term.Fbk;
/* integral term */
v.data.ui = _IQmpy(v.param.Ki, _IQmpy(v.data.w1,
(v.term.Ref - v.term.Fbk))) + v.data.i1;
v.data.i1 = v.data.ui;
/* derivative term */
v.data.d2 = _IQmpy(v.param.Kd, _IQmpy(v.term.c1,
(_IQmpy(v.term.Ref, v.param.Km) - v.term.Fbk))) - v.data.d2;
v.data.ud = v.data.d2 + v.data.d1;
v.data.d1 = _IQmpy(v.data.ud, v.term.c2);
/* control output */
v.data.v1 = _IQmpy(v.param.Kp,
(v.data.up + v.data.ui + v.data.ud));
v.term.Out= _IQsat(v.data.v1, v.param.Umax, v.param.Umin);
v.data.w1 = (v.term.Out == v.data.v1) ? _IQ(1.0) : _IQ(0.0);
#endif // __PID_H__
example
/* Instance the PID module */
PID pid1={ PID_TERM_DEFAULTS, PID_PARAM_DEFAULTS, PID_DATA_DEFAULTS };
main() {
pid1.param.Kp = _IQ(0.5);
pid1.param.Ki = _IQ(0.005);
pid1.param.Kd = _IQ(0);
pid1.param.Kr = _IQ(1.0);
pid1.param.Km =_IQ(1.0);
pid1.param.Umax= _IQ(1.0);
pid1.param.Umin= _IQ(-1.0);
}
void interrupt periodic_interrupt_isr() {
pid1.Ref = input1_1; // Pass _iq inputs to pid1
pid1.Fbk = input1_2; // Pass _iq inputs to pid1
PID_MACRO(pid1); // Call compute macro for pid1
output1 = pid1.Out; // Access the output of pid1
}
5 总结
简单总结了位置式PID算法和增量式PID算法的差异,参考了TI公司的增量式PID算法实现,对于不同的控制对象可以根据系统要求选择合适的PID算法。
原文标题:干货 | 什么是PID算法,增量式PID又是什么?
文章出处:【微信公众号:电子工程世界】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
C语言增量式PID的通用算法2026-01-14 145
-
限时免积分下载:增量式与位置式PID算法的C语言实现分享2025-03-05 3481
-
位置式PID与增量式PID的区别2024-06-05 11630
-
位置式PID与增量式PID简介2022-01-20 3434
-
如何去实现基于stm32的PID算法增量式程序呢2021-12-02 2413
-
PID-基于增量式PID算法的无刷直流电机PWM调速研究2021-09-22 1991
-
PID算法增量式算法2021-09-13 2239
-
增量式PID控制算法程序设计方案下载2021-03-29 1120
-
使用单片机和Arduino实现增量式PID位置式PID算法和PID库免费下载2020-05-28 2200
-
如何使用免疫粒子群优化算法实现增量式的PID控制2019-11-01 1889
-
位置式PID控制算法2016-04-01 852
-
浅析位置式PID与增量式PID算法2016-01-15 9049
-
pid算法_什么是pid算法2012-01-01 12153
全部0条评论

快来发表一下你的评论吧 !
