

何为多传感器融合算法?常用的融合算法包括哪些
描述
因为多传感器的使用会产生大量需要处理的数据,因此通常通过融合算法来对数据进行优化。不同传感器采集到的信息可能相互之间可能会不同甚至是有矛盾,使用融合算法可以帮我们弄懂如何保证系统能够准确处理这些数据,使系统最终做出及时、正确的决策,这非常重要。
何为多传感器融合算法?
融合算法不仅需要处理数据的多样性和复杂性,而且需要提高实时性和精度。虽然多传感器数据融合算法目前没有完整的理论体系,但是对于多种不同领域的应用,已经提出许多成熟且有效的融合算法。融合算法可以概括为随机、人工智能两大类。随机类融合算法有加权平均法、卡尔曼滤波、多贝叶斯估计法等,人工智能类融合算法有模糊逻辑、神经网络等。在自动驾驶中,常用的融合算法包括加权平均法、卡尔曼滤波法、神经网络。这三种方法具有直观性、容错性及普适性。
加权平均法
加权平均法融合数据信息可以通过获取各种传感器信号的平均值来实现。若某一个传感器的信号比其它传感器更可信,则为该传感器分配更高的权重,以增加其对融合信号的贡献。加权平均法是信号级融合最简单、最直观的一种算法,可以对传感器接收到的冗余信息进行加权平均。加权平均法可以对原始数据直接进行使用。通过加权平均法,可以在图像识别中对模糊图像进行处理,使图像识别更加清晰与准确。
卡尔曼滤波
卡尔曼滤波是一种常用的自适应传感器融合算法,用于消除系统中的冗余,预测系统的状态。卡尔曼滤波采用一个线性空间模型,系统的当前状态取决于先前的状态。卡尔曼滤波状态空间模型为:
Xk=AXk-1+Bu+Gw(1)
Zk=HXk+v(2)
式中:Xk为k时刻状态向量;Xk-1为k-1时刻状态向量;A为状态转移矩阵;B为输入转换矩阵;G为过程噪声转移矩阵;u为输入向量;w为过程中噪声向量;Zk为k时刻系统测量信息;H为测量矩阵;v为测量噪声向量。卡尔曼滤波在图像识别中是一种常见的融合算法,可以进行降噪,并增强鲁棒性。卡尔曼滤波虽然是数据层面的融合,但是对于传感器的融合而言非常重要。
神经网络
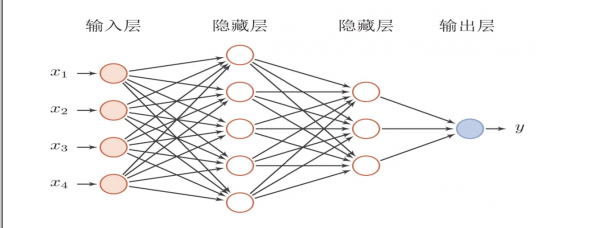
不同于卡尔曼滤波,神经网络提供非线性传递函数和并行处理能力,可以帮助执行图像融合。神经网络由称为神经元的处理节点连接而成。建立神经网络数据融合模型,根据多传感器数据输入和输出之间的关系,分配神经元和互连权值。神经网络既有多层前馈型,也有递归型。神经网络融合输出信号和输入信号,计算相应的权重y:
y=∑wixi(3)
式中:wi为权重;xi为传感器数据。
传统神经网络将图像一层一层映射,最后进行特征提取。目前,多用卷积神经网络进行融合。卷积神经网络可以看作是特征提取与分类器的结合体,单从各个层的映射来看,类似于特征提取的过程,提取不同层次的特征。神经网络的容错性很强,能够用于复杂的非线性映射环境。神经网络强大的容错性及自学习、自组织、自适应能力等特性,满足多传感器数据融合技术处理的要求。神经网络在数据模型中,主要根据当前系统所接受的样本相似性确定分类标准,这一过程表征为网络的权值分布。可以利用神经网络的信号处理能力和自动推理功能,实现多传感器数据融合。如图为四层神经网络模型。
结语:
在自动驾驶技术中,如何使用融合算法以及如何选择合适的算法非常重要,需要根据所选择的传感器以及融合体系分类等原因综合考虑,合理使用融合算法,可以事半功倍,因此在自动驾驶领域,人们要花很多很多时间去解决算法问题。
-
传感器数据融合算法python代码2023-12-15 3422
-
【飞腾派4G版免费试用】Spring Boot和飞腾派融合构建的农业物联网系统-数据融合算法篇2023-12-26 1471
-
Spring Boot和飞腾派融合构建的农业物联网系统-改进自适应加权融合算法2024-01-06 1002
-
【TL6748 DSP申请】基于TMS320C6748的传感器数据融合算法实现2015-09-10 2004
-
姿态融合算法是什么2019-07-19 5030
-
常用的无线传感器网络数据融合算法有什么优缺点?2021-06-03 3113
-
多传感器分组加权融合算法研究2009-07-03 674
-
多传感器异步航迹融合算法与仿真2009-08-07 768
-
一种改进的多传感器加权融合算法2009-12-12 2707
-
一种改进的多传感器信息融合算法2017-01-03 887
-
基于蚁群优化的无线传感器网络数据融合算法2017-01-07 870
-
无线传感器网络数据融合算法的改进与实现_边鹏飞2017-01-19 839
-
基于模糊熵的多传感器加权融合算法_王晶晶2017-03-22 957
-
一种异质多传感器的异步量测融合算法验证2019-04-30 2247
-
多传感器数据融合算法最关键的是2023-12-13 2501
全部0条评论

快来发表一下你的评论吧 !
