

如何利用Arduino UNO制作一个爬楼梯机器人
描述
本文将向您展示如何制作一个非常基本的爬楼梯机器人。这是我们为ServoCity+Actobotics爬楼梯挑战而建造的楼梯熊。事实证明,最后的效果非常棒!
第1步:制作车轮模板
这个设计完全是关于轮子的,如果有一台3D打印机的话,这一步将能够轻松达成。但我们没有,所以我们去了老学校,使用了一些来自HobbyLobby的1/2英寸泡沫板。
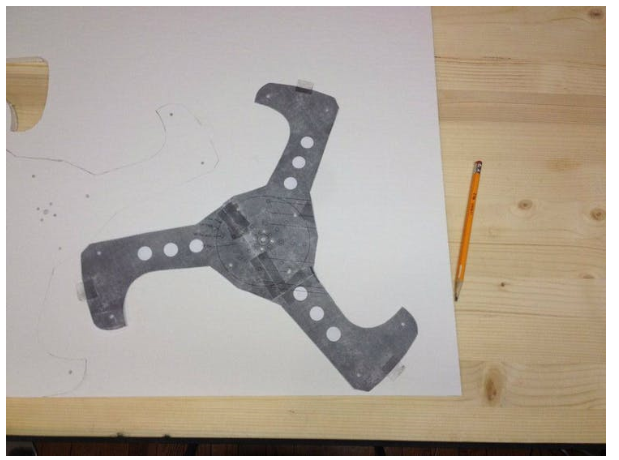
第1步:制作模板
A)下载PDF
B)打印
C)裁剪
D)粘在一起
E)打孔
因为我使用了ActoboticsRoundBaseA,所以我抓取了ServoCity的尺寸图形并将其放入我的AdobeIllustrator文档中,以确保间距恰到好处。我选择在圆形底座上只使用8个孔,最里面的4个用于轮毂,最外面的4个用于车轮稳定性。
每条腿上的3个大圆圈是可选的。我的决策是,如果泡沫没有支撑起来,就尝试使用木材,然后在基础上减轻重量。
第2步:切割和钻孔车轮

我用了一把盒子刀和一个切割哑光,之后我用1/4英寸钻头钻出中心孔,接着用5/32英寸钻头钻其余孔。
第3步:组装车轮

现在是组装轮子的时候了,我会用实际效果的展示图来说话。
第4步:连接

主体简单地由两个18英寸通道组成,这些通道通过一些6-32(1.32英寸长)铝制螺纹支架并联连接,两个在前面,两个在后面。
第5步:安装电机
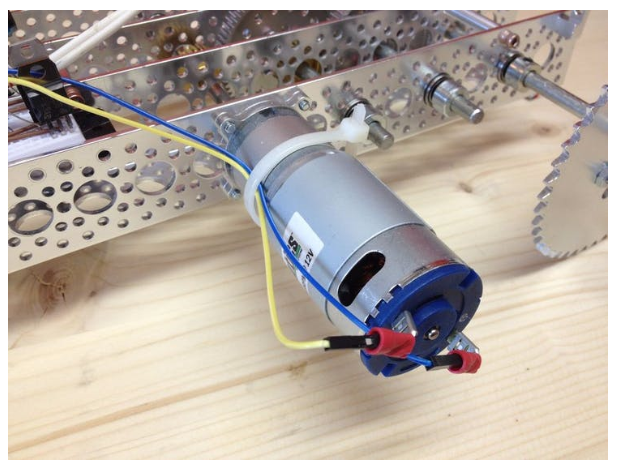
我使用了ServoCity的313RPMHD精密行星齿轮电机。它的最大扭矩为416.6oz-in。
首先将行星齿轮电机底座B安装到电机上,然后安装在右舷通道前端的第8个大孔上。
您还需要将轴耦合器(1/4英寸至6毫米)连接到电机轴。
第6步:全部系上齿轮
齿轮我使用的:
三个24齿、32节距、1/4英寸孔小齿轮
三个72齿、32节距、1/2英寸孔径铝齿轮
这两个齿轮的传动比为3比1。它们被配置为在3个阶段中的每一个阶段降低速度并将扭矩增加三倍。产生的最大速度约为11.6rpm。这是通过一些试验和错误来实现的。不过你可能希望从速度相比更慢的电机开始。
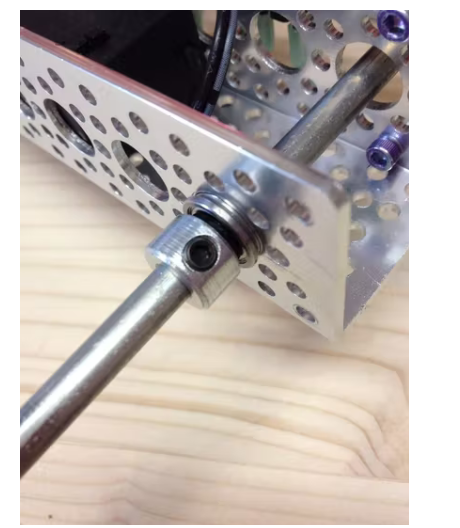
选择您的轴系:
我使用了一些来自ServoCity的精密钢1/4英寸D轴,但也发现你可以拿起一些来自Mendards的1/4英寸“PLATSTL-ROUND”——我尝试了1/4英寸。铝棒和1/4英寸的可焊接钢棒,但它们都太厚了。
使用D轴与五金店的钢棒有利有弊:主要是D形在使用固定螺钉花鼓时非常有用,但是我发现来自ServoCity的精密钢1/4英寸D轴很难使用,因为配合太紧了,很难轻松的开合。五金店的钢棒稍微薄一点,因此更容易使用——但由于没有平坦的一面,它们会因受力很大的固定螺钉而被严重损坏。
你需要的轴:
14英寸轴(x2)-现在一个用于前部,稍后您将需要另一个用于后部。ServoCity最大的D轴为12英寸,因此您可以使用Menards钢棒或使用1/4英寸-1/4英寸的轴耦合器连接两个7英寸D轴。
6英寸轴(x2)
4.5英寸轴(这是连接到电机轴上的耦合器的轴)
轴系提示:
如果您使用Menards的钢棒;切割到一定长度后,将边缘斜切(我用的是dremel),这样可以更容易地放置零件。事实上,也可以对您的PrecisionD轴执行此操作!
无论您使用哪种轴系,都要准备好一个小的细锉,以锉掉损坏的斑点……尤其是如果您使用固定螺钉轮毂。
选择您的集线器:
我最终为齿轮使用了固定螺钉轮毂,为车轮使用了夹紧轮毂。如果您不使用D轴,则夹紧轮毂将更容易拆卸和调整。然而,由于它的设计方式会在您拧紧它时将4个螺钉中的两个拉到一起-我不想给齿轮系引入任何可能的变形或错位。
其他:
您当然需要一些1/4英寸的法兰球轴承(535198)、一些1/4英寸的定位螺钉环和一些1/4英寸的轴垫片以及用于较大齿轮的定位螺钉轮毂。
第7步:链轮和链条
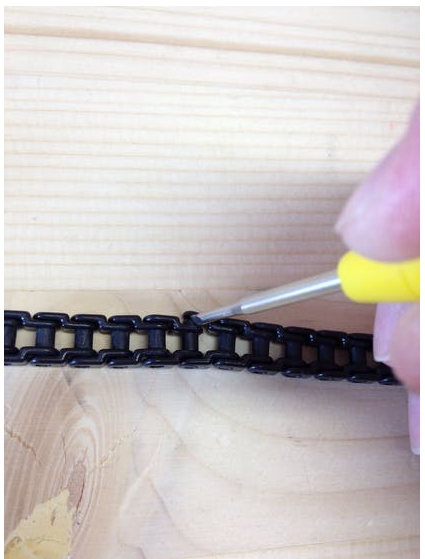
我没有轮毂适配器,但我有单平通道支架,它可以让我将轮毂连接到我的4个48齿大链轮。它们可能没有那么适配器那么实用,但它们在价格方面具有他们的优势。
我使用了ServoCity的塑料链条,因为用起来更清洁(不含油脂或油)。装卸链条实质上很容易,您只需要一把小平头螺丝刀。我用了两条链子,每条链都不长43.5英寸。
第8步:安装车轮

这可能是最有趣的一步。安装链轮、链条和轮子。
确保尽可能拧紧车轮和齿轮上的固定螺钉轮毂和夹紧轮毂螺钉!如果车轮开始失准,机器人可能会变得不稳定并翻倒。
第9步:“大脑”(核心)
我使用了arduinoUno(通过arduino通道卡扣安装)和BLE屏蔽来添加蓝牙功能。arduino由电池座中的9v电池供电,电池座带有一个开关,我用拉链将其系在适当的位置以防止其滑动。
我还用了RedBearLabs的BLEShield。我从他们的库中将BLEControllerSketch加载到了arduino上,然后在我的iPhone上安装了他们的免费应用程序(他们也有一个Android应用程序)。
第一次运行iPhone应用程序时,您需要进入菜单并选择“BLE控制器”。第一次运行时,它会直接进入简单聊天应用程序,这有点让人不知道怎么开始下一步。不过之后,您只需要确保您的arduino已打开电源,然后在应用程序中进行扫描。随后,您可以选择“最后连接”。接下来选择您的引脚(我使用引脚3,因为它能够进行脉冲宽度调制)
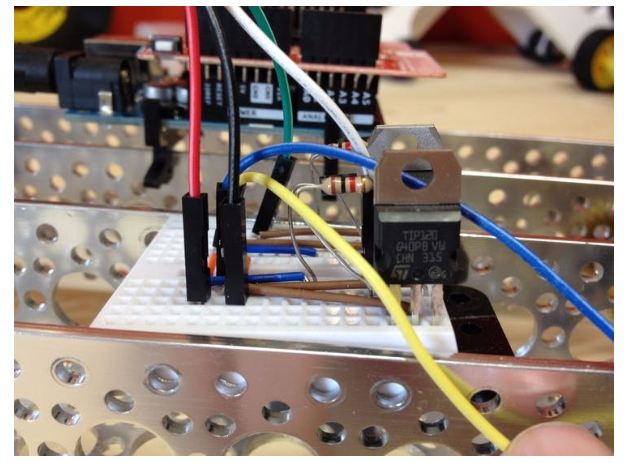
PWM电路
我基本上将这个Instructable的电路用于脉冲宽度调制电路。说明是在打开和关闭螺线管的背景下,但只需用电机代替螺线管并发送pwm而不是高/低,它对于电机速度控制非常有效。简单、便宜、有效。
第10步:电池

接下来,我将一个旧的12v2.2amphr密封铅酸电池连接到楼梯爬升器的前面。虽然它很重(2lb),但是当放置在第一个轴前面时,额外的重量起到了平衡作用,实质上它还起到了稳固整体的作用,并且不太会向后倾斜爬升。
之后我使用了一些90°双面安装E的电池架和一个拉链来扣住它。
第11步:电源线束
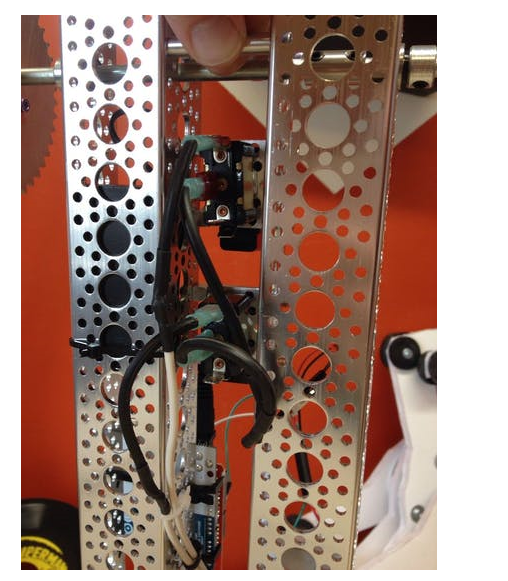
我使用了两个SPST(单刀单掷)开关将12v电池连接/断开PWM电路(一个开关用于+,一个用于-)。这可以充当安全开关,在紧急情况下快速切断电源。随意使用一个DPST(双刀单掷)。我使用了一些安装在两个主要通道之间的QuadHubMountC来安装开关。
-
美军研发能跳《江南Style》的新型机器人2012-11-08 5381
-
请教利用树莓派制作六足机器人的问题2015-11-10 7910
-
做个机器人难么?2016-01-19 6887
-
如何利用arduino UNO配合Orangepi 4B实现制作机器人2022-02-15 860
-
如何去实现一种步行机器人的设计呢2022-03-02 1427
-
这款爬楼快递机器人,可以让你不用下楼,快递直接送进家2018-07-26 7341
-
Cheetah 3猎豹机器人,一款不靠视觉就能移动的机器人2018-08-03 3224
-
能爬楼梯的快递机器人如果量产 快递小哥真的要失业了2019-01-30 2000
-
如何实现双足机器人爬楼梯的步态规划与参数优化2020-04-07 2333
-
自动调整平衡的爬楼梯机器人设计2020-12-25 3852
-
利用arduino UNO配合Orangepi 4B实现制作机器人2021-12-16 901
-
外骨骼辅助双足行走机器人:带轮子也可以上楼梯2022-04-08 9504
-
制作一个爬楼梯机器人2022-10-18 1591
-
基于Arduino UNO的避障机器人2022-12-22 775
-
如何使用Arduino Uno制作智能避障机器人2022-12-26 1282
全部0条评论

快来发表一下你的评论吧 !
