

如何驱动BLDC电机
描述
我们都知道驾驶汽车时看清路面至关重要。而在实施自动驾驶等技术时,对这点要求得更为严格。自动驾驶汽车的“眼睛”被称为光检测和测距(激光雷达)技术,可提供汽车周围环境的精确图像。激光雷达使用光源和传感器来检测物体。
激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于自动驾驶决策算法十分重要。扩大 FOV 的方法有很多种,其中之一就是利用机械扫描,使用电机帮助实现 360 度 FOV。无刷直流 (BLDC) 电机可以实现此目标,且高效低噪,因此广受欢迎。
图 1 展示了激光雷达模块,图 2 展示了配备激光雷达的自动驾驶汽车。
图 1:激光雷达模块
图 2:配备激光雷达的自动驾驶汽车
配备机械扫描激光雷达的自动驾驶汽车
典型的激光雷达模块由光源和传感器组成,可实现 120 度 FOV。遗憾的是 120 度的视场对于自动驾驶环境来说远远不够。要实现 360 度全方位 FOV,需要用一个由置于旋转平台上的光源和传感器组成的机械扫描激光雷达将汽车周围的信息传给汽车的高级驾驶辅助系统。旋转平台以能让光源和传感器实现 360 度无缝扫描的速度旋转,准确反馈图像位置。鉴于平台重量比较轻,可以使用约 40W 的电机。
BLDC 电机非常适合这些旋转平台,并且可以使用霍尔效应传感器实现 BLDC 电机换向。图 3 显示了机械扫描激光雷达的框图。
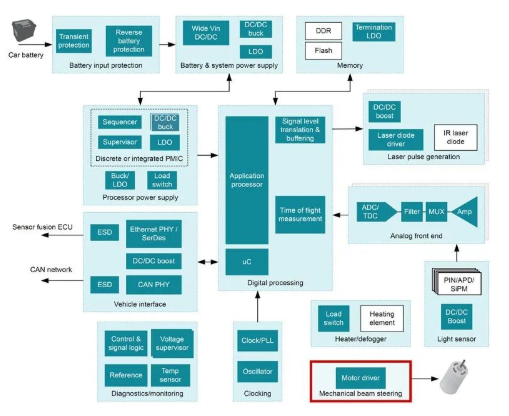
图 3:机械扫描激光雷达框图
如何驱动 BLDC 电机
有几种方法可以驱动约 40W 的 BLDC 电机。您可以搭配使用具有梯形换向算法的微控制器 (MCU) 以及集成三相 BLDC 栅极驱动器和外部金属氧化物半导体场效应晶体管 (MOSFET)。如果您的设计需要应用尺寸较小的电路板和功率较低的电机,您可以考虑将具有集成 MOSFET 的三相栅极驱动器(如DRV8316)和具有换向算法的 MCU 以及三个用于位置反馈的霍尔效应传感器搭配使用。DRV8316 集成了高侧和低侧相加导通状态电阻 (RDS(on)) 为 95mΩ 的 MOSFET,并提供全面的故障覆盖范围,以实现诊断目的。
也可以使用集成了控制算法的电机驱动器(如MCT8316Z)来驱动 BLDC 电机,该电机驱动器集成了传感器梯形控制,无需进行电机控制软件开发。MCT8316Z 集成了 MOSFET,该 MOSFET 高侧和低侧相加 RDS(on) 与 DRV8316 一样,也是 95mΩ。外部搭配内务处理型 MCU,可与 MCT8316Z 进行通信以设置配置参数并提供简单的旋转命令(如速度和方向)。
MCT8316Z 具有直流/直流降压转换器,可为电路板上的内务处理型 MCU 或其他电路提供电流,这种配置有助于为机械扫描激光雷达电机驱动器节省布板空间。DRV8316 和 MCT8316Z 的工作电压均为 4.5V 至 35V,非常适合汽车的 12V 电池应用。借助 8A 峰值电机绕组电流支持,这些驱动器可以在 24V 电源下实现高达 70W 的电机功率,足以驱动激光雷达系统的旋转平台。
MCT8316Z 提供串行外设接口 (SPI),高度可配置,尽管系统设计人员可能会选择使用硬件接口选项,而非 SPI 来配置常用设置。可通过 SPI 读取的内部驱动器寄存器提供详细的故障诊断结果,万一旋转平台中的电机出现问题,该结果可提供诊断帮助。图 4 显示了 MCT8316Z 的简化使用示例。
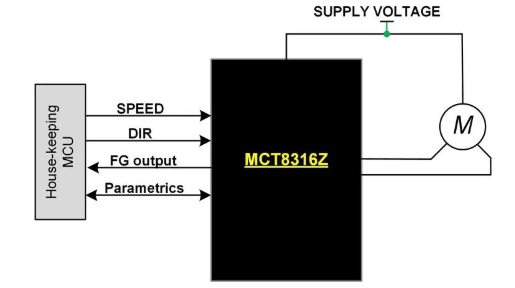
图 4:MCT8316Z 电机控制示例
配备机械扫描激光雷达的自动驾驶汽车是汽车领域一次令人振奋的进展。自动驾驶汽车带来的便利提高了乘驾体验,让您渴望拥有这样一辆汽车去州际公路旅行。
-
Texas Instruments DRV8161EVM驱动器评估模块 (EVM)数据手册2025-07-06 1188
-
使用PWM生成模式驱动BLDC电机2024-09-06 723
-
基于GD32驱动BLDC电机(1)定时器和PWM2023-12-13 3930
-
想用GaN功率级驱动BLDC电机?这组开发工具超好用!2023-06-01 2471
-
求助,有人可以低速驱动BLDC电机吗?2023-01-30 704
-
使用X-NUCLEO-IHM07M1和FOC驱动BLDC电机发现过流保护一直触发怎么解决2022-12-02 896
-
#电机驱动 BLDC电机结构和优势电子技术那些事儿 2022-09-12
-
驱动BLDC电机的半桥开启高端和低端MOSFET2022-08-09 1259
-
英飞凌提供紧凑三相驱动BLDC电机驱动方案2021-09-10 6294
-
BLDC电机电位器调速2018-03-01 6746
-
开源硬件-TIDA-00656-用于空气净化器风扇的 24V、50W BLDC 电机正弦驱动 PCB layout 设计2009-07-17 934
全部0条评论

快来发表一下你的评论吧 !
