

关于贪心算法详解
描述
顾名思义,贪心算法总是作出在当前看来最好的选择。也就是说贪心算法并不从整体最优考虑,它所作出的选择只是在某种意义上的局部最优选择。
当然,希望贪心算法得到的最终结果也是整体最优的。虽然贪心算法不能对所有问题都得到整体最优解,但对许多问题它能产生整体最优解。
如单源最短路经问题,最小生成树问题等。在一些情况下,即使贪心算法不能得到整体最优解,其最终结果却是最优解的很好近似。
基本思路:
1. 建立数学模型来描述问题。
⒉.把求解的问题分成若干个子问题。
⒊.对每一子问题求解,得到子问题的局部最优解。
⒋.把子问题的解局部最优解合成原来解问题的一个解。
实现该算法的过程:
⒈.从问题的某一初始解出发;
2. while 能朝给定总目标前进一步 do
3.求出可行解的一个解元素;
4.由所有解元素组合成问题的一个可行解。从问题的某一初始解出发
背包问题
有一个背包,最多能承载150斤的重量,现在有7个物品,重量分别为[35, 30, 60, 50, 40, 10, 25],它们的价值分别为[10, 40, 30, 50, 35, 40, 30],应该如何选择才能使得我们的背包背走最多价值的物品?
把物品一个个的往包里装,要求装入包中的物品总价值最大,要让总价值最大,就可以想到怎么放一个个的物品才能让总的价值最大,因此可以想到如下三种选择物品的方法,即可能的局部最优解:
1:每次都选择价值最高的往包里放。
2:每次都选择重量最小的往包里放。
3:每次都选择单位重量价值最高的往包里放。
4:选择价值最高的,按照制订的规则(价值)进行计算,顺序是:4 2 6 5 。
最终的总重量是:130;最终的总价值是:165。
2:选择重量最小的,按照制订的规则(重量)进行计算,顺序是:6 7 2 1 5 。
最终的总重量是:140;最终的总价值是:155。可以看到,重量优先是没有价值优先的策略更好。
3:选择单位密度价值最大的,按照制订的规则(单位密度)进行计算,顺序是:6 2 7 4 1。
最终的总重量是:150;最终的总价值是:170。
可以看到,单位密度这个策略比之前的价值策略和重量策略都要好。
单源最大路径问题
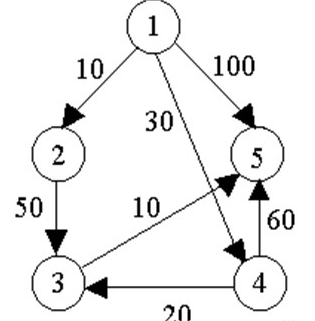
给定带权有向图G =(V,E),其中每条边的权是非负实数。另外,还给定V中的一个顶点,称为源。现在要计算从源到所有其它各顶点的最短路长度。这里路的长度是指路上各边权之和。这个问题通常称为单源最短路径问题。
Dijkstra算法是解单源最短路径问题的贪心算法。
其基本思想是,设置顶点集合S并不断地作贪心选择来扩充这个集合。一个顶点属于集合S当且仅当从源到该顶点的最短路径长度已知。
初始时,S中仅含有源。设u是G的某一个顶点,把从源到u且中间只经过S中顶点的路称为从源到u的特殊路径,并用数组dist记录当前每个顶点所对应的最短特殊路径长度。
Dijkstra算法每次从V-S中取出具有最短特殊路长度的顶点u,将u添加到S中,同时对数组dist作必要的修改。一旦S包含了所有V中顶点,dist就记录了从源到所有其它顶点之间的最短路径长度。
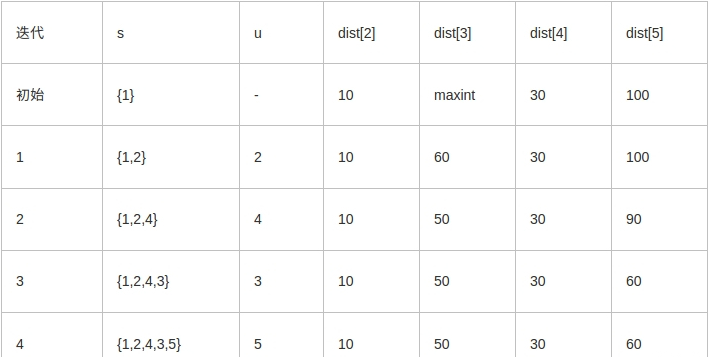
例如,对下图中的有向图,应用Dijkstra算法计算从源顶点1到其它顶点间最短路径的过程列在下表中。
Dijkstra算法的迭代过程:
算法的正确性和计算复杂性
(1)贪心选择性质
(2)最优子结构性质
(3)计算复杂性
对于具有n个顶点和e条边的带权有向图,如果用带权邻接矩阵表示这个图,那么Dijkstra算法的主循环体需要O(n)时间。这个循环需要执行n-1次,所以完成循环需要O(n)时间。算法的其余部分所需要时间不超过O(n^2)。
代码实现(来自于第四个参考链接):
using namespace std ;class BBShortestDijkstra{public:BBShortestDijkstra (const vector<vector<int> >& vnGraph):m_cnMaxInt (numeric_limits<int>::max()){m_vnGraph = vnGraph ;m_stCount = vnGraph.size () ;m_vnDist.resize (m_stCount) ;for (size_t i = 0; i < m_stCount; ++ i) {m_vnDist[i].resize (m_stCount) ;}}void doDijkatra (){int nMinIndex = 0 ;int nMinValue = m_cnMaxInt ;vector<bool> vbFlag (m_stCount, false) ;for (size_t i = 0; i < m_stCount; ++ i) {m_vnDist[0][i] = m_vnGraph[0][i] ;if (nMinValue > m_vnGraph[0][i]) {nMinValue = m_vnGraph[0][i] ;nMinIndex = i ;}}vbFlag[0] = true ;size_t k = 1 ;while (k < m_stCount) {vbFlag[nMinIndex] = true ;for (size_t j = 0; j < m_stCount ; ++ j) {// 没有被选择if (!vbFlag[j] && m_vnGraph[nMinIndex][j] != m_cnMaxInt ) {if (m_vnGraph[nMinIndex][j] + nMinValue< m_vnDist[k-1][j]) {m_vnDist[k][j] = m_vnGraph[nMinIndex][j] + nMinValue ;}else {m_vnDist[k][j] = m_vnDist[k-1][j] ;}}else {m_vnDist[k][j] = m_vnDist[k-1][j] ;}}nMinValue = m_cnMaxInt ;for (size_t j = 0; j < m_stCount; ++ j) {if (!vbFlag[j] && (nMinValue > m_vnDist[k][j])) {nMinValue = m_vnDist[k][j] ;nMinIndex = j ;}}++ k ;}for (int i = 0; i < m_stCount; ++ i) {for (int j = 0; j < m_stCount; ++ j) {if (m_vnDist[i][j] == m_cnMaxInt) {cout << "maxint " ;}else {cout << m_vnDist[i][j] << " " ;}}cout << endl ;}}private:vector<vector<int> > m_vnGraph ;vector<vector<int> > m_vnDist ;size_t m_stCount ;const int m_cnMaxInt ;} ;int main(){const int cnCount = 5 ;vector<vector<int> > vnGraph (cnCount) ;for (int i = 0; i < cnCount; ++ i) {vnGraph[i].resize (cnCount, numeric_limits<int>::max()) ;}vnGraph[0][1] = 10 ;vnGraph[0][3] = 30 ;vnGraph[0][4] = 100 ;vnGraph[1][2] = 50 ;vnGraph[2][4] = 10 ;vnGraph[3][2] = 20 ;vnGraph[3][4] = 60 ;BBShortestDijkstra bbs (vnGraph) ;bbs.doDijkatra () ;}
贪心算法三个核心问题
第一个问题:为什么不直接求全局最优解?
1.原问题复杂度过高;
2.求全局最优解的数学模型难以建立;
3.求全局最优解的计算量过大;
4.没有太大必要一定要求出全局最优解,“比较优”就可以。
第二个问题:如何把原问题分解成子问题?
1、按串行任务分
时间串行的任务,按子任务来分解,即每一步都是在前一步的基础上再选择当前的最优解。
2、按规模递减分
规模较大的复杂问题,可以借助递归思想(见第2课),分解成一个规模小一点点的问题,循环解决,当最后一步的求解完成后就得到了所谓的“全局最优解”。
3、按并行任务分
这种问题的任务不分先后,可能是并行的,可以分别求解后,再按一定的规则(比如某种配比公式)将其组合后得到最终解。
第三个问题:如何知道贪心算法结果逼近了全局最优值?
这个问题是不能量化判断的,正是因为全局最优值不能够知道,所以才求的局部最优值。追求过程需要考虑以下几个问题:
1.成本
耗费多少资源,花掉多少编程时间。
2.速度
计算量是否过大,计算速度能否满足要求。
3.价值
得到了最优解与次优解是否真的有那么大的差别,还是说差别可以忽略。
-
算法设计:8.1 贪心算法(2)#硬声创作季学习电子 2022-12-21
-
贪心算法学习2019-09-04 4092
-
基于贪心算法的云计算资源调度策略2017-01-07 1032
-
一种混合进化算法提高仓库货物平台的作业效率2017-11-13 808
-
动态规划算法和贪心算法的区别与联系2017-11-30 76451
-
基于贪心算法的非一致决策表的决策树分析方法2017-12-05 869
-
一种基于贪心算法的紧急控制策略优化搜素方法2018-03-06 994
-
使用模拟退火与贪心策略的平衡聚类算法的介绍2018-11-28 1314
-
清华毕业计算机教授遭持枪劫车!靠“贪心算法”追回秒杀美国警察2019-01-19 4610
-
分治算法详解:表达式的不同优先级2021-01-04 2677
-
贪心算法:分发饼干2022-06-06 1587
-
贪心算法的基础知识2022-09-14 4126
-
C语言最常用的贪心算法2022-10-31 997
-
基于贪心算法的智能RGV的动态调度策略2023-04-11 667
全部0条评论

快来发表一下你的评论吧 !
