

MEH控制系统的原理及功能介绍
描述
MEH控制系统以高压抗燃油为工作介质,以电液伺服阀为液压接口设备,以高低压调节阀油动机为执行机构,控制给水泵汽轮机的转速。本文以图文形式介绍MEH控制系统原理及功能。
一、给水泵汽轮机电液控制系统(MEH)原理
该MEH以高压抗燃油为工作介质,以电液伺服阀为液压接口设备,以高低压调节阀油动机为执行机构,构成一套完整的MEH控制系统,控制给水泵汽轮机的转速,满足用户的要求。
锅炉给水泵汽轮机用于驱动大型电站锅炉给水泵,满足锅炉给水的要求。MEH控制原理见图1
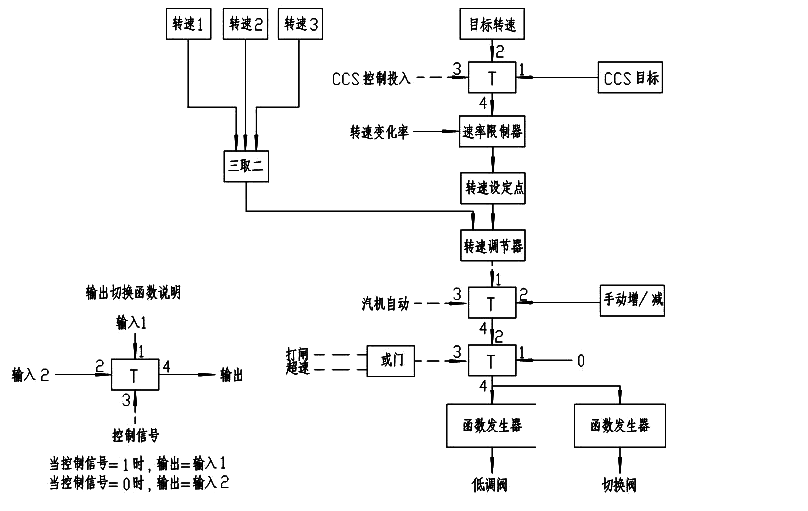
图1MEH控制系统原理图
机组在启动和正常运行过程中,通过测速板采集机组的转速,开关量通过开入板送到控制回路上,DPU将这些信号进行判断、分析、计算,再综合LVDT返回的信号,输出控制信号到伺服阀,通过伺服阀来改变调节阀的开度,控制进入给水泵汽轮机的蒸汽流量,改变汽轮机的转速。当汽机转速变化时,它所控制的给水泵转速也随着变化,给水泵的出口流量变化,从而达到对锅炉给水流量的要求。
机组一般有两个汽源。一个工作汽源,来自主机四段抽汽;一个备用汽源,来自再热器冷端蒸汽。工作汽源(主机四段抽汽)和备用汽源(再热器冷端蒸汽)都用同一个蒸汽室—喷嘴室,采用喷嘴配汽。进汽系统示意图见图2。不同工程的工作汽源和备用汽源可能略有不同。
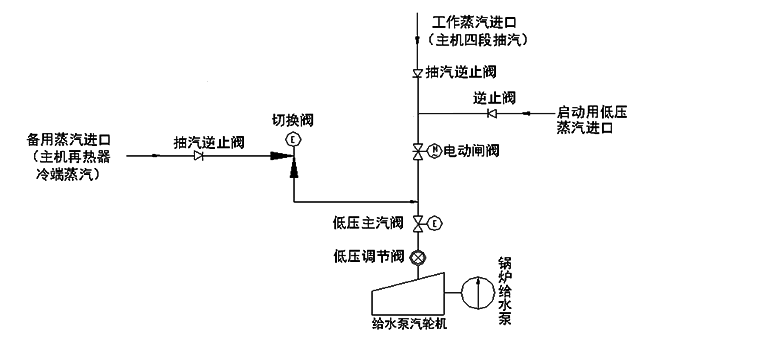
图2MEH进汽系统示意图
本机组采用低压辅助汽源启动。启动过程中,辅汽通过逆止阀、电动闸阀、低压主汽阀、低压调节阀进入给水泵汽轮机,此时抽汽逆止阀、切换阀均关闭。随着大机负荷的上升,工作蒸汽参数也随之上升。当大机负荷大于汽源切换点时,工作蒸汽参数能够满足主机功率对给水量的要求,切除辅助启动汽源,即在汽源切换点以上工况均由工作汽源(主机四段抽汽)做功,在运行转速范围:2840r/min~5945r/min内连续平稳运行,其最低转速能维持给水泵最小流量循环工况。上述过程给水泵汽轮机转速由低压调节阀控制。
在大机降负荷时,工作蒸汽参数也随之下降。大机从高负荷降到汽源切换点级以下,即大机定压运行时,锅炉蒸汽压力保持不变,大机负荷降到40%以下时,给水泵的转速要保证锅炉蒸汽压力保持不变;大机滑压运行时,锅炉蒸汽压力随负荷变化,大机负荷降到30%以下时,要保证给水泵最低运行转速2840r/min。
若给水泵汽轮机低调阀开度到大于95%时,工作蒸汽参数仍不能满足上述要求,则需切换到备用汽源(再热器冷端蒸汽)。此时给水泵汽轮机的转速由切换阀控制,实际转速与给定转速比较后得到一个差值,经PID运算后,输出阀门开度指令信号到切换阀。切换阀打开的同时低压调节阀将开至全开,并且低压进汽管道上的抽汽逆止阀自动关闭,即将给水泵汽轮机进汽切换为备用汽源(再热器冷端蒸汽)做功。当实际转速和目标转速一致,即切换阀的开度反馈信号与阀门开度指令信号一致时,切换阀上电液伺服阀切断油动机的进油、排油,切换阀开度保持。
在大机升负荷时,工作汽源参数和备用汽源参数均随之上升。大机从低负荷上升到汽源切换点及以上,工作汽源参数能满足主机功率对给水量的要求,则需切换到工作汽源做功。由于备用汽源参数上升,切换阀将逐渐关小以满足主机功率对给水量的要求,并开始切换过程,切换过程中主机四段抽汽逆止阀将自动打开,待切换阀全关后切换过程完成,给水泵汽轮机转速又由低压调节阀控制。
二、控制系统主要功能
1、MEH控制系统有三种运行控制方式
①手动控制方式
手动控制方式为开环控制方式。在该方式时,操作员通过操作OIS上的“手动阀位设定”按钮或“增”、“减”按钮来设定阀位开度值,直接控制阀门的开度,达到控制转速的目的。
②转速自动控制方式
转速自动控制方式是自动调节常用的方式之一,操作员通过操作OIS上的“手动/自动”按钮可选择将控制方式切换到转速自动控制方式,并通过设定目标转速及升速率,进行自动升速。
为了保证信号的可靠性,MEH系统将对从现场转速传感器测到的转速信号进行三取二处理,得到一个可靠的实际转速信号。若三路转速中有两路转速信号故障,将判定系统转速故障,切到手动控制方式。现场转速信号送到测速板后,在测速板内进行处理,转变为数字量信号送到控制回路,控制回路将此信号作为实际转速输入信号。实际转速和给定转速比较后得到一个差值,经过PID计算后,控制回路输出阀门开度指令信号到电液伺服阀,控制伺服阀动作,改变调节阀的开度,从而控制进入汽轮机的蒸汽流量,使汽轮机的转速发生变化。当调节阀的开度反馈信号与阀门开度指令信号一致,即实际转速和设定的目标转速一致,此时电液伺服阀自动回到中间位置,切断油动机的进油、排油,调节阀开度将保持,一个转速自动调节过程结束。
转速自动控制回路的PID参数能通过工程师站在线进行修改,这有利于操作人员根据实际情况对控制过程进行有效的干预,大大的提高了控制的可靠性和灵活性,更加适应现代自动控制的要求。
③锅炉自动控制方式
要投入锅炉自动控制方式,必须满足下列条件:
a、MEH处于转速自动控制方式;
b、锅炉控制系统来的锅炉给水流量信号在2800r/min~6000r/min之间;
c、实际转速和锅炉控制系统来的锅炉给水流量信号相差在±25r/min内;
d、MEH接收到“CCS请求”信号。
当上述条件满足,操作员操作OIS上的“CCS控制”按钮,即可投入锅炉自动控制方式。
在锅炉自动控制方式下,MEH接收来自锅炉控制系统的4-20mA控制信号,并转换为MEH中的转速信号,4mA对应2800r/min,20mA对应6000r/min,它们是线性的。此时,MEH仅仅作为一个执行机构。MEH接收到锅炉控制系统的控制信号后,直接送到控制回路,作为目标值,MEH向锅炉控制系统输出一个4mA~20mA信号作为反馈信号。在锅炉自动控制方式下,汽轮机转速随着锅炉控制系统控制信号变化而变化。
锅炉自动控制方式是一种更加完善的控制方式,它同时考虑了汽轮机和锅炉的控制,它将整个电厂作为一个系统来控制,可以使控制过程更加的趋于合理化。
由于在锅炉自动控制方式下,锅炉控制系统来的控制信号是经过控制回路进行过转换的,所以,转速自动控制回路能够很好的跟踪锅炉自动控制回路统,当从锅炉自动控制方式切换到转速自动控制方式时,不会产生任何扰动,能够维持原来的状态和运行控制参数。
在锅炉自动控制方式下,如果上述条件中任意一项不满足将切除锅炉自动控制方式。
2、小机的挂闸和打闸
汽轮机的挂闸,就是一个高压保安油压的建立的过程。当机组满足汽轮机已打闸、所有阀全关这两个条件,操作员通过操作OIS上的挂闸按钮,输出挂闸指令信号去动作就地电磁阀,使高压保安油压建立,当MEH接收到高压保安油压建立信号后,通过逻辑判断,挂闸成功,此时OIS上的挂闸按钮状态显示为挂闸,整个挂闸过程结束。
汽轮机有三种打闸方式:第一种是集控室控制台上的手动停机按钮。第二种是当汽机转速达到电气超速动作转速时,MEH控制回路输出汽机打闸信号。第三种是当MEH接收到METS来的遮断汽机的信号后,经过继电逻辑硬回路实现汽机打闸。
当汽机在运行过程中发生异常状况时,需要紧急停机,可以通过操作集控室控制台上的手动停机按钮实现紧急停机,保护汽机的安全。
3、超速保护和超速试验
MEH在汽机的正常运行中,软件设有超速保护逻辑。若运行时汽轮机的实际转速超过设定的超速保护值时,MEH输出超速打闸信号,使现场的各个电磁阀动作,卸掉高压保安油压,使主汽阀和调节阀迅速关闭,蒸汽将无法进入汽机,转速下降,保证了汽轮机的安全。
为了确保超速保护逻辑动作的准确性MEH设有电气超速试验。操作员通过操作OIS上的电气超速试验按钮,将其置为试验位,再设定目标转速为超速保护动作转速值,设定合适的升速率,开始升速。当汽轮机实际转速达到超速保护动作转速值时,MEH输出超速打闸信号去动作现场的各个电磁阀,卸掉高压保安油,使汽轮机停机。
4、阀门活动试验
为了防止主汽门因长期处于全开状态导致卡涩,MEH设置有阀门活动试验功能。低压主汽门做活动试验时,操作员通过操作OIS上的主汽门试验按钮,将其置为投入,MEH便输出阀门活动试验指令信号去动作低压主汽门上的活动试验电磁阀,使低压主汽门关闭。当MEH接收到阀门活动试验到位信号,MEH使活动试验电磁阀失电,低压主汽门又重新开启到全开位。当MEH接收到低压主汽门全开信号,低压主汽门活动试验完毕。
5、高压遮断模块遮断电磁阀试验
小机的停机电磁阀共有四只,为“两并两串”结构。为了防止汽轮机长期运行时停机电磁阀卡涩,MEH设有遮断电磁阀活动试验,四只电磁阀只能单独试验。当操作相应的电磁阀活动试验按钮后,MEH就发出相应的试验信号,使该电磁阀失电,从而引起相应的压力开关动作,MEH收到压力开关动作信号后,表示试验成功,电磁阀重新带电,至此,试验结束。
6、阀门校验
整定伺服系统静态关系的目的在于使油动机在整个全行程上均能被伺服阀控制。阀位给定信号与油动机升程的关系为:
◆给定0-100对应行程0-100%
◆为保持此对应关系有良好的线性度,要求油动机上作反馈用的LVDT,在安装时,应使其铁芯在中间线性段移动。
◆在给水泵汽轮机启动前,可分别对油动机快速地进行整定。
注意:必须确认主汽阀前无蒸汽,以免整定时,汽轮机失控。
为保证上述关系有良好的线性,可先进行零位校正。零位校正时,给定值为50,移动LVDT的安装位置,使油动机行程为50%即可。
不同的电气系统有不同的阀门静态整定方法,具体参见各个系统的阀门静态关系整定操作步骤。
一般在作完静态关系的整定之后,还需进行线性度的测试。此时,在系统中发出开度指令,例如:要求开度指令=20.0,在就地测量阀门实际行程。记录开度指令、阀门实际行程和阀门位置反馈,通常要求做一个来回的全行程记录。要求阀门实际开度和阀门位置反馈之差不能大于阀门全行程的1%。
-
PLC控制系统设计介绍--课程设计准备知识2009-06-13 5273
-
机房的天线自动控制系统简要介绍2019-06-11 2391
-
基于DSP+FPGA的控制系统方案设计介绍2019-07-29 3087
-
WCS仓库控制系统案例介绍2021-07-02 3060
-
介绍一种基于FPGA的电机控制系统2022-02-17 1083
-
火力发电厂分散控制系统验收测试规程2010-02-06 919
-
一种新型多功能顺时控制系统的设计?2009-05-14 1073
-
仪表及控制系统功能安全评估综述2011-06-09 1066
-
电机控制系统与simulink仿真介绍2015-12-29 2216
-
汽车巡航控制系统的介绍2017-11-20 1711
-
plc控制系统设计步骤2018-10-15 20834
-
智能家居控制系统的功能2019-03-26 6684
-
汽车的智能车身控制系统功能介绍2019-07-12 8444
-
Acrel-BUS智能照明控制系统的功能介绍2022-05-31 1510
-
DCS控制系统原理 DCS控制系统的基本功能2024-02-02 6381
全部0条评论

快来发表一下你的评论吧 !
