

使用EtherCAT快速开发直流伺服系统
今日头条
1192人已加入
描述
EtherCAT是一种基于以太网的开放式实时现场总线系统。EtherCAT的研发目标是将以太网应用于需要短暂数据更新时间(也称周期时间,≤100µs)的自动化应用,且通信抖动小(为了实现精确同步,≤1 µs)、硬件成本更低。
作为一款用于机器控制解决方案的稳健型高速实时网络,EtherCAT越来越受到控制和系统工程师的欢迎。由于确定性的高速更新速率和所有网络装置极其精确的同步,机器制造商和系统集成商可利用使用EtherCAT的运动和机器控制器专用平台轻松设计整体机器控制解决方案,同时还能保持最高的性能等级、实现低成本结构。
【图1:TMC8462-EVAL+ TMCC160-EVAL】
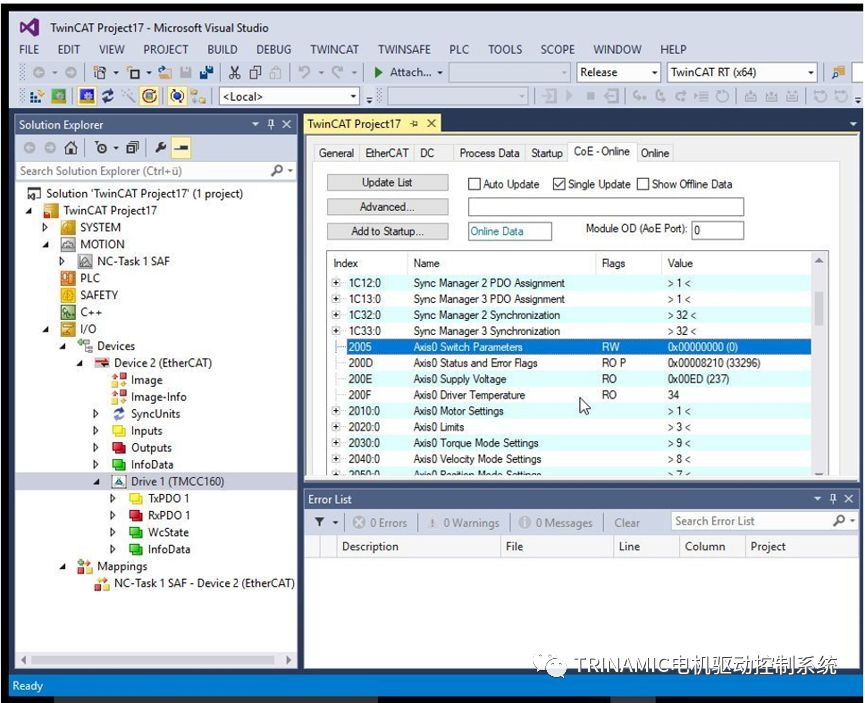
作为嵌入式运动控制领导者德国Trinamic Motion Control为EtherCAT用户提供高效、高性能解决方案。特制作基于EtherCAT通讯的直流伺服快速开发指导文章,采用是Trinamic的自主EtherCAT从站控制芯片TMC8462和全球首款嵌入式直流伺服片载系统TMCC160,EtherCAT的主控采用的是BECKHOFF的TwinCAT3文章详细介绍了TMC8462-EVAL和TMCC160-EVAL硬件接线、TwinCAT3配置以及如何实现位置和速度控制模式,文章旨在帮助用户快速完成EtherCAT直流伺服系统开发。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 以太网
- ethercat
- 直流伺服系统
- EtherCAT控制器
-
直流伺服系统的结构与工作原理2024-06-12 3152
-
伺服系统原理及分类2023-08-27 4659
-
交流伺服系统具有哪些优点和缺点及常见故障2023-03-07 3185
-
PLC的工业机器人关节直流伺服系统2021-09-17 2255
-
伺服系统的发展和应用常识2019-10-30 4799
-
伺服系统设计验证流程解决方案2019-04-05 1710
-
伺服系统应用于哪儿_伺服系统应用实例2018-05-31 17924
-
伺服系统什么意思_伺服系统的作用是什么2018-04-28 35577
-
伺服系统是什么_伺服系统的基本要求_伺服系统的基本组成2018-03-27 24571
-
开环位置伺服系统及现代交流伺服系统的解析2017-11-08 1337
-
伺服系统的发展及其在机电设备中的应用2017-10-31 1247
-
伺服系统介绍2011-07-10 3013
-
全数字直流伺服系统设计2011-03-09 1219
-
进给伺服系统2009-02-16 868
全部0条评论

快来发表一下你的评论吧 !
