

KUKA机器人变量$ FCT_CALL在TCP/IP的应用
描述
命令通道 $ FCT_CALL 的管理编号(句柄)
CWRITE() 函数可用于通过 $FCT_CALL 命令通道调用函数。变量本身是写保护的。
例如:
EKI_STATUS = EKI_Init(CHAR[])初始化TCP/IP通讯通道
EKI_STATUS = EKI_Open(CHAR[])打开TCP/IP通讯
EKI_STATUS = EKI_Close(CHAR[])关闭TCP/IP通讯
EKI_STATUS = EKI_Clear(CHAR[])清除TCP/IP通讯通道里的内容
这些通讯功能函数最终都会通过下列运算来实现控制:
初始化TCP/IP通讯通道
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Init",strChannelName[])
关闭TCP/IP通讯
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Close",strChannelName[])
打开TCP/IP通讯
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Open",strChannelName[])
清除TCP/IP通讯通道里的内容
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Clear",strChannelName[])
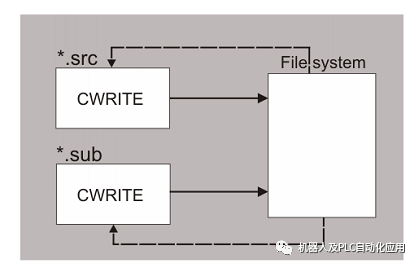
通过命令通道$ FCT_CALL进行通讯
机器人控制器通过加载的外部模块从另一个控制器(例如从摄像机系统)接收位置数据。机器人控制器使用CREAD从外部模块读取这些位置数据。CWRITE可用于通过命令通道在文件系统上执行操作。示例:通过命令通道打开文件,然后在文件中写入一个字符或字符串。可以从机器人解释程序或提交解释程序调用文件系统功能。不允许从一个解释器打开文件然后从另一个解释器访问文件,例如 写入或再次关闭文件。
调用文件系统功能时,会将特定数量的参数传输到该功能。这些函数中的每一个都通过CWRITE提供返回值。返回值指示该函数是成功执行还是因错误而中止。如果发生错误,可以使用返回的错误号来定位原因。
通过命令通道$ FCT_CALL进行通信
审核编辑 :李倩
-
KUKA重型机器人2015-02-03 8136
-
求KUKA机器人控制柜三维模型2016-04-18 6340
-
KUKA机器人问题解答2019-07-15 2532
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10786
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 7884
-
工业机器人组成结构相关资料分享2021-07-05 2562
-
库卡机器人MGV电源模块维修2021-09-08 1720
-
KUKA机器人伺服驱动模块维修2021-09-17 1750
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3776
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2113
-
KUKA机器人CWRITE函数的用法说明2022-04-11 3516
-
KUKA编程中$FCT_CALL的存在2022-07-06 1664
-
命令通道$FCT_CALL的功能2022-07-07 1255
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1451
-
KUKA机器人系统变量$PRO_NAME所选程序的名称(参考解释器)2023-05-15 2651
全部0条评论

快来发表一下你的评论吧 !
