

基于SRF05和ATtiny85实现的超声波测距仪设计
描述
超声波测距仪是各种现实生活和机器人应用中的有用工具,例如避障和距离测量系统。超声波测距仪通过发射一个 40KHz 的超声波脉冲来测量距离,该脉冲在空气中传播直到它击中一个物体,然后它测量反射信号的延迟并向其他单元发送适当的命令。
我使用了一个 SRF05 超声波传感器和一个 ATtiny85 微控制器。距离数据显示在 128*64 OLED 屏幕上,以厘米和英寸为单位。此外,水平条形图提供了距离的视觉估计。MCU 代码是使用 Arduino IDE 开发的。
为了设计原理图和 PCB,我使用了 Altium Designer 22 和 SamacSys 组件库(Altium 插件)。为了获得高质量的 PCB 板,我将 Gerber 发送到 PCBWay,并使用 componentsearchengine.com 购买了原始组件。为了检查电路的电流消耗,我使用了 Sigilent SDM3045X 万用表。
规格
输入电压:6-24VDC
电流消耗:24mA
检测范围:2-400cm(见正文)
距离数据:厘米、英寸、条形图
显示:128*64-黄蓝OLED
下载 Gerbers
电路分析
图1为超声波测距仪装置示意图。很明显,该电路由四个主要部分组成:传感器、电源、MCU和显示器。我分别解释每个部分。
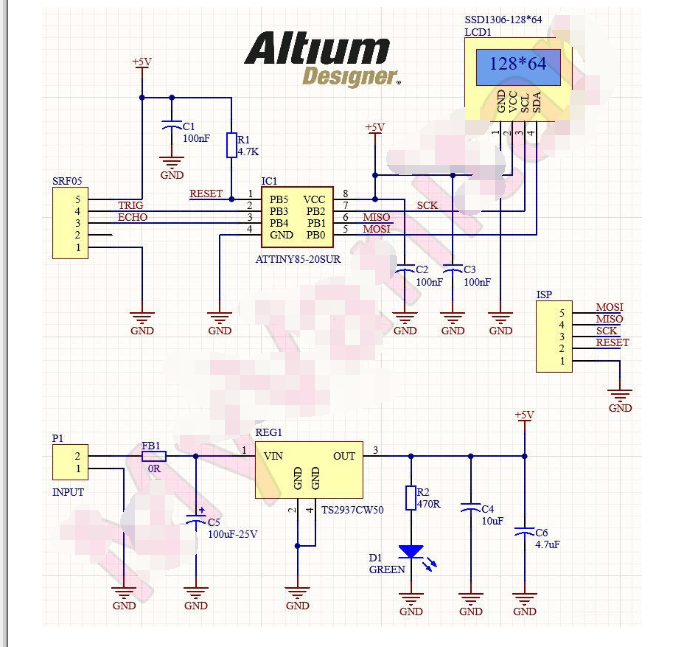
图1-超声波测距仪(Altium)示意图
SRF05超声波传感器
我在电路中使用了 SRF05 超声波模块。市面上的 SRF05 模块有很多种,我用的是图 2 所示的那个。
模块的质量可能会有所不同,因此无法保证最大检测范围。其中一些有蓝色阻焊层,一些是绿色的,不同的制造商也提供这样的模块。
根据 SRF05 模块数据表:“SRF05 是 SRF04 的进化步骤,旨在提高灵活性、扩大范围并进一步降低成本。因此,SRF05 与 SRF04 完全兼容。射程从 3 米增加到 4 米。一种新的操作模式(将模式引脚接地)允许 SRF05 使用单个引脚来触发和回波,从而节省控制器上宝贵的引脚。当模式引脚未连接时,SRF05 使用单独的触发和回波引脚运行,如 SRF04。SRF05 在回波脉冲之前包含一个小延迟,以便为较慢的控制器(例如 Basic Stamp 和 Picaxe)提供时间来执行它们的脉冲命令。”
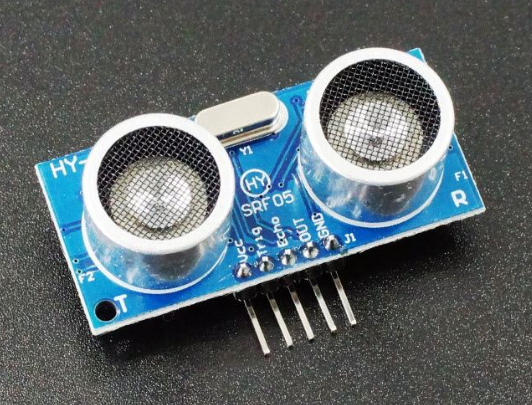
图 2-SRF05 超声波模块(蓝色阻焊层)
电源供应
电源的主要元件是TS2937CW50[1]稳压器(REG1)。它是一个 +5V SOT-223 LDO 稳压器。根据 TS2937 数据表:“TS2937 固定电压单片微功率稳压器专为广泛的应用而设计。该器件是电池供电应用的绝佳选择。此外,静态电流在压降时略有增加,从而延长了电池寿命。该系列固定电压稳压器具有极低的接地电流(典型值 200uA)和极低的压降输出电压(典型值在轻负载时为 60mV,在 500mA 时为 600mV)。这包括 2% 的严格初始容差、0.05% 典型值的极好线路调节以及非常低的输出温度系数。”
FB1 和 C5 降低输入电压噪声。D1 是蓝色 0805 LED,用于指示电源连接正确,R2 限制 D1 的电流。C4 和 C6 用于降低 +5V 电源轨的噪声。P1 是一个 XH-2P 母连接器,用于将电源线连接到电路板。
微控制器
IC1 是一个 ATtiny85 MCU [2],它是电路的核心。我选择了这款芯片的贴片封装。根据 Tiny85 数据表:“ATtiny25/45/85 提供以下特性:2/4/8K 字节系统内可编程闪存、128/256/512 字节 EEPROM、128/256/256 字节 SRAM、6 个通用专用 I/O 线、32 个通用工作寄存器、一个 8 位定时器/计数器(带比较模式)、一个 8 位高速定时器/计数器、通用串行接口、内部和外部中断、一个 4 通道、10-位 ADC、带内部振荡器的可编程看门狗定时器和三种软件可选的省电模式。空闲模式停止 CPU,同时允许 SRAM、定时器/计数器、ADC、模拟比较器和中断系统继续工作。掉电模式保存寄存器内容,禁用所有芯片功能,直到下一次中断或硬件复位。ADC 降噪模式会停止 CPU 和除 ADC 之外的所有 I/O 模块,以最大限度地减少 ADC 转换期间的开关噪声。该器件采用 Atmel 的高密度非易失性存储器技术制造。片上 ISP 闪存允许程序存储器通过 SPI 串行接口、传统的非易失性存储器编程器或运行在 AVR 内核上的片上引导代码在系统内重新编程。”
C1、C2 和 C3 是去耦电容,用于降低噪声。R1 是一个上拉电阻,用于避免不必要地触发 MCU 的 RESET 引脚。
OLED显示器
该显示器由一个 0.96” 128*64 OLED 模块和一个 SSD1306 控制器芯片组成。模块的数据/命令接口为 I2C。图 3 显示了该模块的图片。I2C 由需要使用两个电阻上拉的 SDA 和 SCL 线组成。该模块已经实现了上拉,因此无需在线路上添加更多电阻。
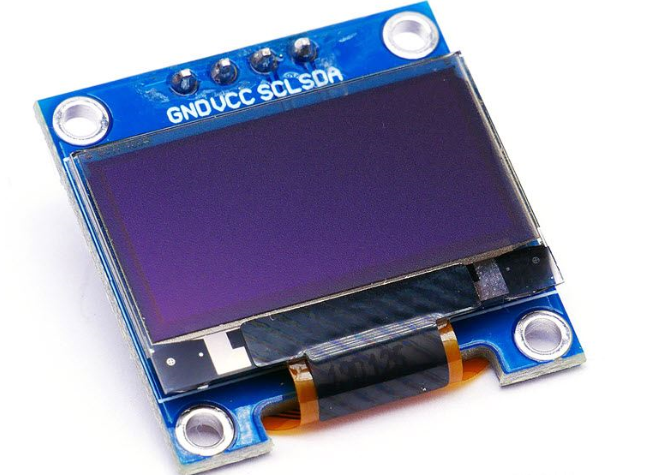
图 3-设备OLED显示屏(0.96”, 128*64, I2C)
PCB布局
图 4 显示了电路的 PCB 布局。它是一个两层 PCB 板,所有组件都是 SMD。显示器应位于 PCB 上方几毫米处,以保持组件与显示器背面之间的距离,以避免短路等。PCB 设计紧凑且易于使用。
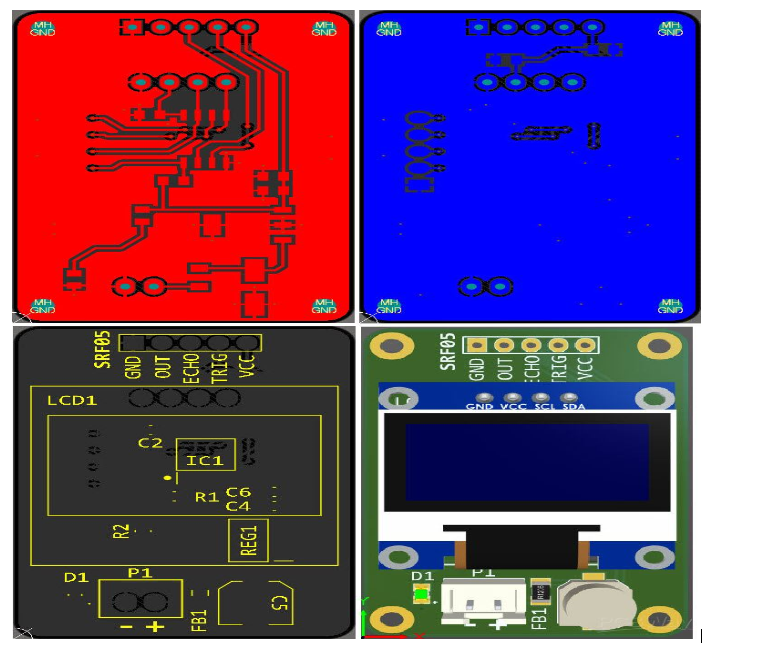
图 4-超声波测距仪(Altium)的PCB布局
当我决定为这个项目设计原理图和 PCB 时,我意识到我的组件库存储中没有 REG1 [3] 和 IC2 [4] 的组件库。因此,像往常一样,我选择了 IPC 级 SamacSys 组件库,并使用免费的 SamacSys 工具和服务安装了缺少的库(原理图符号、PCB 封装、3D 模型)。导入库有两种方法:您可以访问 componentsearchengine.com 并手动下载和导入库,或者您可以使用 SamacSys CAD 插件并自动将库导入/安装到设计环境中。图 5 显示了所有支持的电子设计 CAD 软件 [5]。很明显,所有著名的球员都得到支持。我使用 Altium Designer,所以我使用 SamacSys Altium 插件安装了缺少的库(图 6)[6]。

图 6-SamacSys Altium 插件中的选定组件库
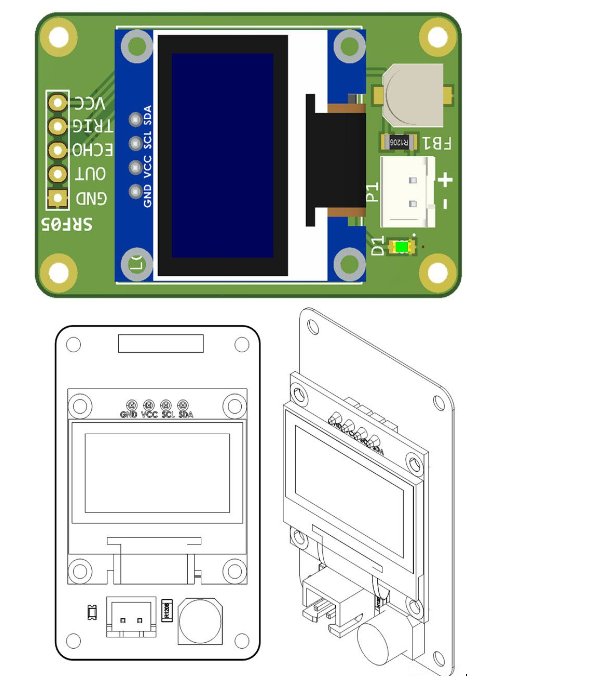
图 7-PCB板的3D视图和两个组装图
#include
#include
unsigned long uS = 0;
#define TRIGGER_PIN 3
#define ECHO_PIN 4
#define MAX_DISTANCE 41
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
unsigned int CM = 0, IN = 0;
unsigned char cnt = 0;
void setup() {
oled.begin(128, 64, sizeof(tiny4koled_init_128x64br), tiny4koled_init_128x64br);
oled.on();
oled.setCursor(0, 1);
oled.setFont(FONT8X16);
oled.clear();
oled.print("ULS Range Finder");
}
void loop() {
uS = sonar.ping();
CM = sonar.convert_cm(uS) + CM;
IN = sonar.convert_in(uS) + IN;
cnt ++;
if (cnt == 10)
{
oled.setCursor(0, 2);
oled.print(CM / 10);
if (CM / 10 < 10)
{
oled.setCursor(9, 2);
oled.print(" Centimeter ");
} else
{
oled.setCursor(17, 2);
oled.print(" Centimeter");
}
oled.setCursor(0, 4);
oled.print(IN / 10);
if (IN / 10 < 10)
{
oled.setCursor(9, 4);
oled.print(" Inches ");
} else
{
oled.setCursor(17, 4);
oled.print(" Inches");
}
switch (CM / 10)
{
case 0:
oled.setCursor(0, 6);
oled.print(" [out of range] ");
break;
case 1 ... 4:
oled.setCursor(0, 6);
oled.print("== ");
break;
case 5 ... 9:
oled.setCursor(0, 6);
oled.print("==== ");
break;
case 10 ... 14:
oled.setCursor(0, 6);
oled.print("===== ");
break;
case 15 ... 19:
oled.setCursor(0, 6);
oled.print("======= ");
break;
case 20 ... 24:
oled.setCursor(0, 6);
oled.print("========= ");
break;
case 25 ... 29:
oled.setCursor(0, 6);
oled.print("=========== ");
break;
case 30 ... 34:
oled.setCursor(0, 6);
oled.print("============= ");
break;
case 35 ... 39:
oled.setCursor(0, 6);
oled.print("=============== ");
break;
case 40 ... 41:
oled.setCursor(0, 6);
oled.print("================");
break;
}
CM = 0;
IN = 0;
cnt = 0;
}
delay(10);
}
MCU的代码编写如下。您需要安装 ATtinyCore Board Manager [7] 并从菜单中选择 ATtiny25/45/85(无引导加载程序)(图 8)。然后选择芯片为 ATtiny85 并选择 8MHz (Internal) 作为时钟源(图 9)。
然后您需要安装 NewPing [8] 和 Tiny4KOLED [9] 库。之后,只需转到“Sketch”菜单并选择“Export compiled binary”(图 10)。就是这样。您可以在与您的代码相同的文件夹中找到已编译的 HEX 文件。只需使用 AVR ISP 编程器(例如 USBasp 或其他)使用 PCB 背面的可用引脚(GND、RESET、MISO、MOSI、SCK)对芯片进行编程。按照程序对保险丝位进行编程,如图 11 所示。从板上断开编程器和电线,就是这样:-)。
代码
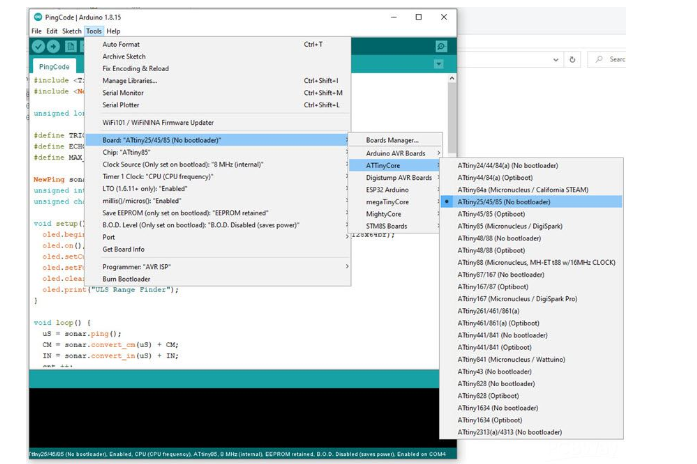
图 8-从菜单中选择合适的芯片系列(ATTiny25/45/85(无引导加载程序))
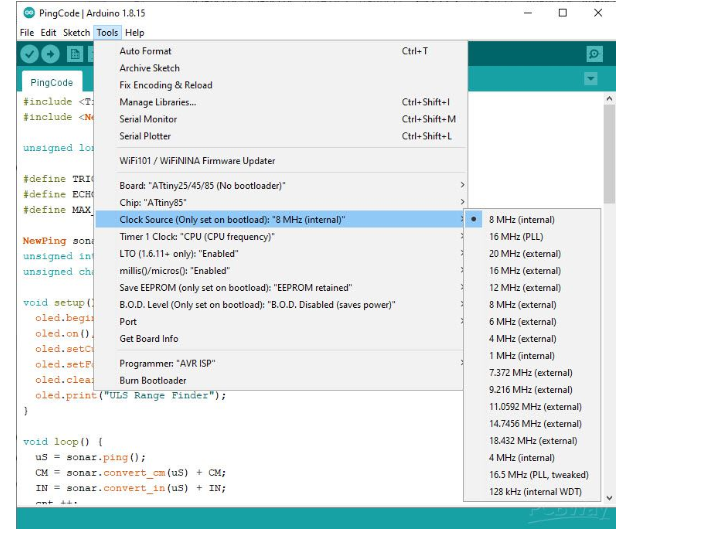
图 9-ATtiny85 时钟源选择(8MHz,内部)
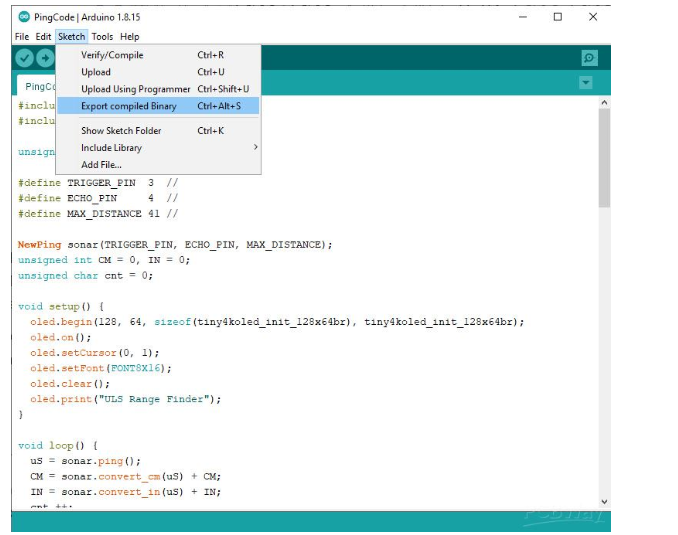
图 10-找到和导出 HEX 文件(草图菜单)
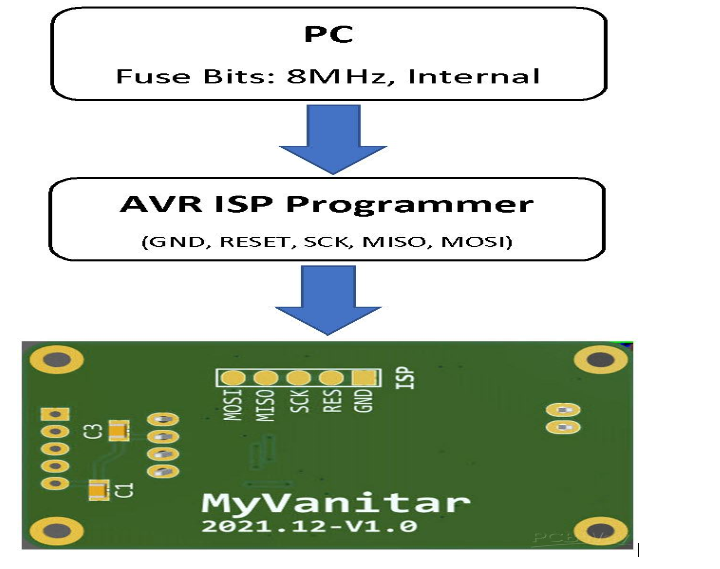
图 11-使用 AVR ISP 编程器对电路板进行编程
组装和测试
图 12 显示了组装好的 PCB 板。我在显示器和 PCB 之间放了一块双面胶带,以避免任何可能的短路。从图片中可以清楚地看到,OLED屏幕上的文字非常鲜艳生动。
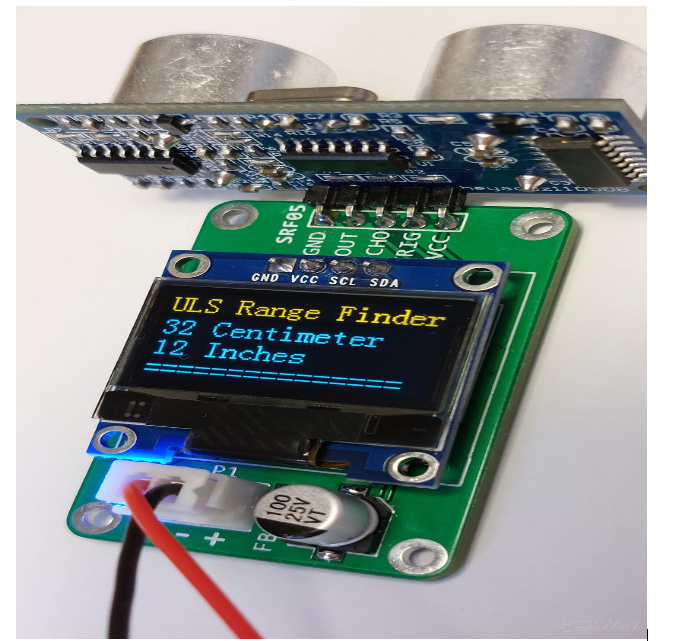
图 12-超声波测距仪的组装PCB板
如果您计划使用电池为电路板供电,则设备的电流消耗很重要。所以我使用了 Siglent SDM3045X 台式万用表 [10] 并测量了 24mA 的电流。图 13 显示了万用表屏幕。

图 13-超声波测距仪电路的电流消耗
材料清单
图 14 显示了该项目的材料清单。
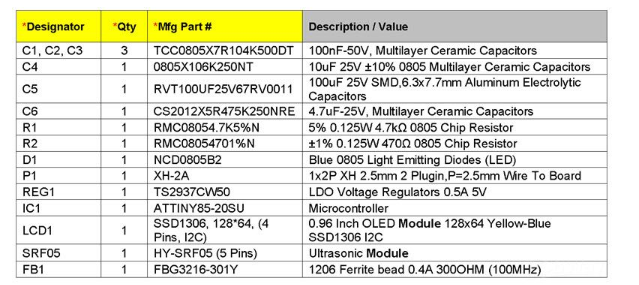
图 14-材料清单
- 相关推荐
- 热点推荐
- 超声波
-
探究SRF05和ATtiny85的超声波测距仪2023-03-16 2223
-
使用带有Raspberry Pi的超声波测距模块构建超声波测距仪GUI2022-12-26 926
-
超声波测距仪设计案例2022-11-29 844
-
使用Arduino的超声波测距仪2022-10-27 1670
-
使用SRF05和ATtiny85的超声波测距仪2022-07-04 974
-
基于SRF05和ATtiny85的超声波测距仪2022-06-23 1045
-
如何去实现一种HY-SRF05超声波测距模块呢2021-11-08 2162
-
数字超声波测距仪的详细剖析2019-06-04 2279
-
HY-SRF05超声波测距程序2016-04-28 1276
-
电子设计应用超声波测距仪的设计2015-12-16 1203
-
超声波测距仪的设计2011-11-15 9087
-
超声波测距仪研究2011-03-04 6877
-
制作超声波测距仪原理及实现2010-06-02 9540
全部0条评论

快来发表一下你的评论吧 !
