

用高级仿真电流模式AECM DC/DC控制拓扑实现快速负载瞬态响应和低EMI
描述
什么是 AECM 控制?
有许多类型的控制拓扑可解决非隔离开关 DC/DC 转换器和控制器的特定设计挑战 [1],包括峰值电流模式控制 (PCM)、电压模式控制、恒定导通时间 (COT) 控制、 D-CAP2™ 控制拓扑及其所有衍生产品。根据占空比的实现,可以将这些控制拓扑分为两类:脉宽调制(PWM)技术和脉冲频率调制(PFM)技术。PWM 技术在用于为通信、音频和汽车设备供电的 DC/DC 转换器中很常见。它具有固定且可预测的开关频率,便于设计低电磁干扰 (EMI) 的输出滤波器。
PFM 技术在用于为图形引擎、存储器、数字信号处理器和现场可编程门阵列等数字应用供电的 DC/DC 转换器中很常见,因为它具有快速的负载瞬态响应。控制拓扑确实会影响 DC/DC 转换器设计,并且可能会根据系统级要求而有所不同,例如纹波、解决方案尺寸、负载瞬态响应、固定频率和轻负载效率。没有单一的控制拓扑适合所有应用。
在本白皮书中,我将介绍一种基于恒定频率和电感电流的控制拓扑,该拓扑具有智能环路带宽控制,称为高级仿真电流模式 (AECM)。这种新的控制拓扑结合了 PFM 和 PWM 技术的优点,显示出快速负载瞬态响应和真正的固定开关频率操作。AECM 可以帮助提高当前使用 PCM 和 PFM 技术的应用程序的性能。
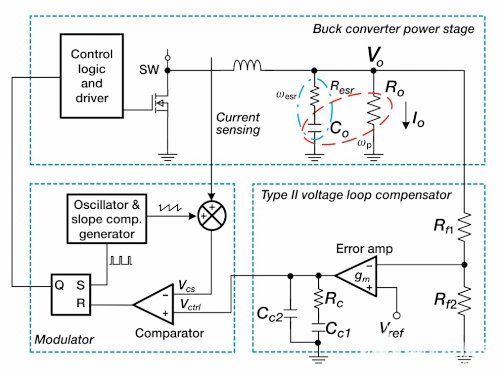
图 1.
PCM 控制方案框图。图片由
Bodo's Power Systems提供
PCM
PCM 是一种流行的 DC/DC 转换器固定频率控制拓扑,因为它具有过载保护、准确性和易于补偿的特点。图 1 说明了降压转换器的 PCM 控制。
功率级由功率开关和输出滤波器组成。补偿模块包括输出分压器网络、误差放大器、参考电压和补偿元件。脉宽调制器使用比较器将电感电流信息与斜率补偿斜坡与误差信号进行比较,从而产生一个宽度可通过误差信号电平控制的输出脉冲序列。
如图 2 所示,内部时钟启动一个脉冲,高端场效应晶体管 (FET) 开启,电感中的电流增加。当检测到的电流达到控制电压时,高侧 FET 关闭,低侧 FET 开启,直到时钟的下一个上升沿。在下一个时钟脉冲产生下一个 PWM 脉冲。因此,取决于时钟的开关频率是真正固定的。
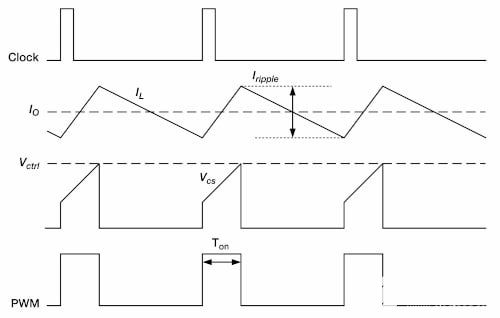
图 2.
PCM 控制方案波形。图片由
Bodo's Power Systems提供
PCM 控制引入了一个内部电流环路,它将电感器转换为电压控制的电流源。功率级可以近似为一个电流源,为输出电容和负载电阻的并联组合供电,并产生一个低频极点。功率级还包括一个由输出电容器设置的高频零点及其等效串联电阻 (ESR)。II型补偿通常引入一零一极来补偿输出极点和输出零点。
使用传统 PCM 控制设备进行设计的工程师更喜欢外部补偿,以便为宽输出电压范围的应用实现良好的环路性能。然而,外部补偿使环路设计复杂化并且需要更多的外部元件。为了简化设计,越来越多的集成电路 (IC) 制造商开发了内部补偿 PCM 控制器件,将 Type-II 环路补偿与 Rc、Cc1 和 Cc2 集成在一起。Rc 和 Cc1 产生一个固定的内部零点来补偿输出极点,而 Rc 和 Cc2 产生一个固定的内部高频极点来补偿输出零点。然而,有效输出电容和负载电阻都会对输出极点产生影响。为了支持宽输出电压范围或宽输出电容范围,您必须将固定内部零设置得相对较低才能获得良好的稳定性。更重要的是,PCM控制的交叉频率(fc)被设计成满足fsw/5 < fc < fsw/10。因此,误差放大器引入了一些延迟,从而限制了负载瞬态响应。
PCM也有这些缺点:
• 输出电压越低,在一定输出电流下的负载电阻越低。使输出极点接近固定的内部零点需要较大的输出电容,从而导致更高的物料清单成本。
• 一些通过钳位控制电压以在轻负载下实现高效率的 PCM 器件可能会面临多脉冲问题,从而导致较大的输出纹波。
D-CAP2控制方案
D-CAP2 控制方案是自适应 COT 控制的一种变体,在 IC 内部集成了一个仿真斜坡发生器电路。这种控制方案在降压转换器中很受欢迎,因为它简单且改进了负载瞬态性能。图 3 显示了降压转换器的 D-CAP2 控制框图,而图 4 显示了相应的控制波形。
斜坡发生器(纹波注入发生器)模拟电感电流信息并将该信息返回到比较器。
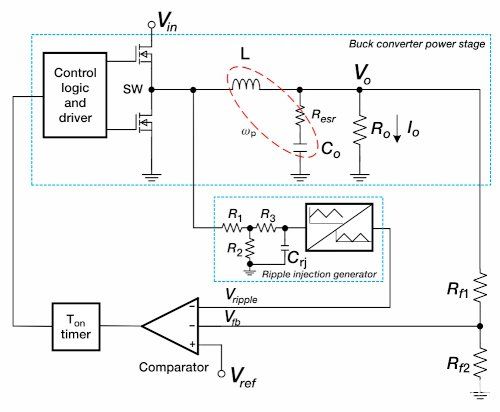
图 3.
D-CAP2™ 控制方案框图。图片由
Bodo's Power Systems提供
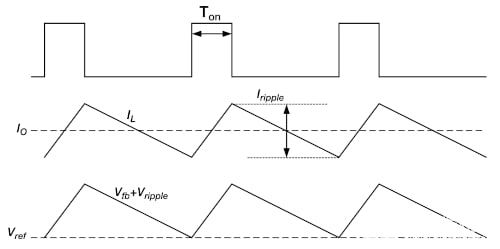
图 4.
D-CAP2 控制方案波形。图片由
Bodo's Power Systems提供
当仿真斜坡电压和反馈电压低于参考电压时,比较器输出变为高电平以启动导通时间脉冲。导通时间脉冲 (Ton) 的宽度是恒定的,因为它是由自适应导通时间发生器根据输入电压、输出电压、输出电流和频率设置计算得出的。关断时间取决于电压纹波,它在线路或负载瞬态期间有一些变化。结果,开关频率是伪固定的。在导通期间,高侧 FET 开启,电感电流增加以对输出电压充电。导通时间过后,高侧 FET 关闭,低侧 FET 开启。输出电压下降,直到产生下一个导通时间脉冲。因为 D-CAP2 控制拓扑没有集成振荡器或时钟,导通时间可能会受到从逻辑到驱动器的传播延迟的影响,从而导致抖动性能不佳。这就是 IC 制造商不容易设计具有 D-CAP2 控制拓扑的高开关频率降压转换器 (2.1 MHz) 的主要原因。此外,仿真斜坡生成电路在不同负载条件下存在不同的失调电压,导致输出电压精度较差。
D-CAP 控制拓扑要求输出上有一些纹波,低 ESR 电容器可能会成为问题。这就是工程师需要 D-CAP2 控制的原因。D-CAP2 降压转换器的内部仿真斜坡发生器电路也存在一些限制,因此传统的 D-CAP2 降压转换器只能支持高达 7 V 的输出。还有最低关断时间要求由于谷底电压检测;因此,不建议将 D-CAP2 控制用于大占空比应用。
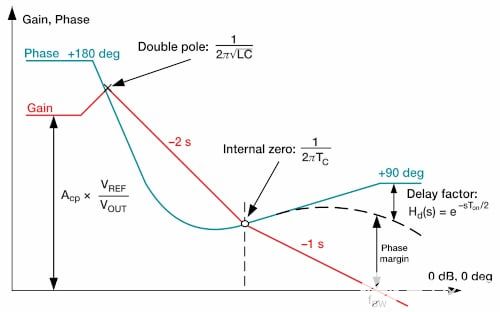
图 5.
D-CAP2™ 降压转换器的波特图。图片由
Bodo's Power Systems提供
参考文献 [2] 提出了 DCAP2 控制拓扑的开环传递函数。图 5 显示了相应的波特图。仿真斜坡生成模块引入了一个内部零点,可以消除由输出电感和电容设置的双极点,从而使增益图以每十倍频的 –20 dB 斜率穿过水平线 0 dB,并提升相位在交叉频率的余量。等式 1 将开环传输的直流增益表示为:
G (0) = A × H (0) = A × V (1)
其中 Acp = (R1 + R2)/R2。
由于 Acp 和 Vref 是恒定的,因此直流增益与 VOUT 成反比。如图 6 所示,如果 VOUT1 > VOUT0 > VOUT2,则直流增益趋势为 Gain1 < Gain0 < Gain2。对于某个设备,内部零是固定的。假设不同输出的双极点相同,则带宽趋势为 fBW1 < fBW0 < fBW2。因此,对于 D-CAP2 降压转换器,较高的输出电压将具有较低的带宽。
此外,由于占空比不能随 COT 控制而改变,导通时间发生器将在环路中产生延迟因子,从而导致高频相位下降。更大的占空比意味着更长的导通时间,从而导致更大的相位下降。
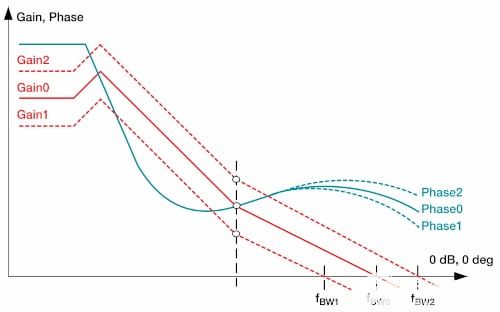
图 6.
D-CAP2™ 降压转换器在不同 VOUT 条件下的波特图。图片由
Bodo's Power Systems提供
AECM 控制优势
AECM 是一种基于固定频率调制器的新拓扑,具有用于环路控制的仿真电流信息,结合了 PCM 控制的固定频率和 D-CAP2 控制拓扑的快速负载瞬态响应。AECM 的主要特点和优势包括:
真正的固定频率调制,可以简化 EMI 滤波器设计,轻松实现 2.1 MHz 等高频调制。
具有智能环路带宽控制的仿真斜坡发生器电路,可智能调节直流增益,支持具有良好负载瞬态性能的宽输出和高占空比应用。
可以简化降压转换器的 AECM 控制,如图 7 所示。有两种基本操作模式,PWM 模式和 PFM 模式,可由模式检测模块选择。电压环路中的积分器可以改善输出电压精度问题。
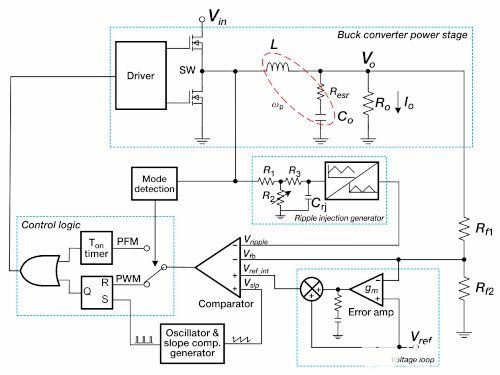
图 7.
AECM 控制框图。图片由
Bodo's Power Systems提供
集成振荡器产生固定时钟。在 PWM 模式下占空比高于 50% 时,在调制器中实施斜率补偿可避免次谐波振荡。带有智能环路带宽控制电路的仿真斜坡发生器可以调整直流增益,以在所有输出轨上实现高带宽。即使有积分器,与 PCM 控制不同,AECM 控制中的积分器也可以提高输出电压精度,而不会直接影响回路响应速度。
AECM 控制的工作原理
PWM操作模式
PWM 模式控制方案类似于 PCM 控制。如下页图 8 所示,内部时钟以一个 onpulse 开头;高边 FET 然后开启,电感中的电流增加。当仿真斜坡电压、反馈电压和斜坡补偿电压达到集成参考电压时,高侧 FET 关闭,低侧 FET 开启,直到下一个时钟周期。因此,在 PWM 模式下,开关频率是真正固定的。
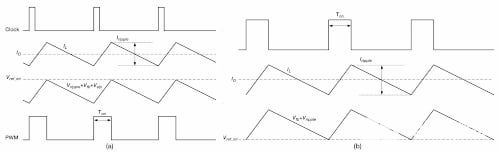
图 8.
AECM 控制方案波形:PWM 工作模式(a);PFM 操作模式 (b)。图片由
Bodo's Power Systems提供
图 9 显示了 AECM 设备的负载瞬态行为。占空比随着 VOUT 的减小或增大而增大或减小。
PFM 操作模式
AECM 控制实施 PFM 模式以在轻负载下实现高效率。随着负载电流的降低,器件从连续导通模式 (CCM) 进入非连续导通模式 (DCM)。在这两种模式下,开关频率都是固定的;导通脉冲宽度 (Ton) 取决于负载电流。较轻的负载具有较短的吨。AECM 有一个类似于 D-CAP2 控制拓扑的准时发生器,但该发生器在 PWM 模式下被禁用。
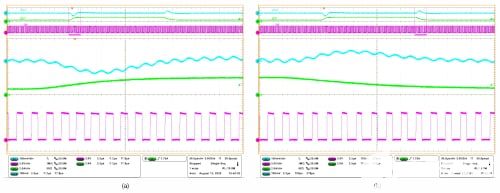
图 9.
占空比随负载电流的变化:负载升压 (a);负载降压 (b)。图片由
Bodo's Power Systems提供
随着负载电流的进一步降低,Ton 降低到内部钳位导通时间,而 AECM 设备进入 PFM 模式,内部时钟被阻止并启用导通时间发生器。如图 8 所示,PFM 模式的控制方案类似于 D-CAP2 控制方案。下页的图 10 显示了 PWM 模式和 PFM 模式之间的转换波形。
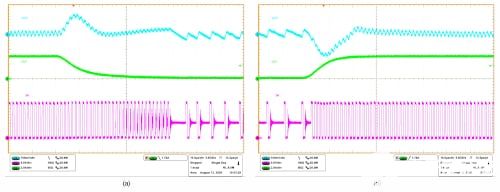
图 10.
AECM 的 PWM 模式和 PFM 模式之间的转换波形:PWM 模式到 PFM 模式(a);PFM 模式转为 PWM。图片由
Bodo's Power Systems提供
智能环路带宽控制
与 PCM 控制不同,直接电感电流信息位于环路中,AECM 使用仿真电感电流信息。AECM 控制的输出滤波器引入了一个双极点,类似于 D-CAP2 控制拓扑。因此,AECM 控制的波特图类似于 D-CAP2 控制拓扑。
在 D-CAP2 控制中,Acp 是恒定的,开环传递函数的直流增益随 VOUT 而变化。在 AECM 控制中,Acp 根据 VOUT 设置适应 R2 的变化值,以使 Acp × VOUT 保持恒定值以获得固定的直流增益。如图 11 所示,假设不同输出的双极点相同,与 D-CAP2 控制的环路带宽相比,不同输出下的环路带宽应该更接近。
下页的图 12 显示了在不同 VOUT 条件下 AECM 控制的测量波特图。直流增益几乎相同。由于输出双极移,交叉频率和相位裕度略有不同。
表 1 比较了传统的 PCM 降压转换器和 AECM 降压转换器。下页的表 2 比较了 D-CAP2 降压转换器和 AECM 降压转换器。
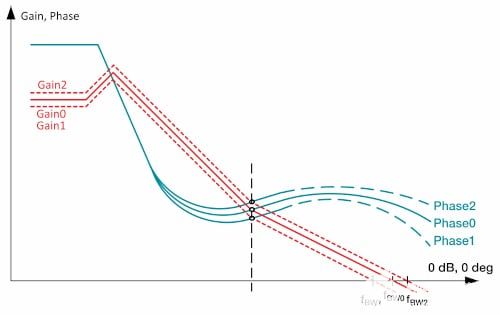
图 11.
AECM 不同 VOUT 条件下的波特图。图片由
Bodo's Power Systems提供
| 传统 PCM 降压转换器(内部补偿) | AECM 降压转换器 | |
| 负载瞬态响应 |
•慢的。 • 固定内部零位设置得相对较低。 •误差放大器延迟。 |
•快速地。 • 智能环路带宽控制提供了相对较高的内部零。 •无误差放大器延迟。 |
| 轻载脉冲 |
•单一或非单一。 • 由钳位控制电压脉冲控制。 |
•单身的 • PFM 操作模式下由导通时间控制的脉冲。 |
| 宽输出稳定性 |
•难的。 • 固定且相对较低的内部零位使其难以支持较宽的输出范围。 |
•简单的 •智能环路带宽控制提供可调节的带宽。 |
表 1.
比较 PCM 和 AECM 降压转换器。
| D-CAP TM降压转换器 | AECM 降压转换器 | |
| 频率 |
•伪固定,难以支持高频。 •频率取决于定时发生器,导致频率变化很大。 |
•真正固定且易于支持高频。 •频率取决于内部时钟,导致频率变化很小。 |
| 高电压输出 |
• 低于 7 V。 •内部仿真斜坡发生器电路的限制。 |
•高于 7 V。 •改进的内部仿真斜坡发生器电路和智能环路带宽控制。 |
| 大占空比 |
•难的 •内部仿真斜坡发生器电路的限制。 • 需要较长的最短停机时间。 |
•简单的。 •改进的内部仿真斜坡发生器电路和智能环路带宽控制。 • 需要较短的最短停机时间。 •准时延长功能。 |
表 2.
比较 D-CAP2™ 降压转换器和 AECM 降压转换器。
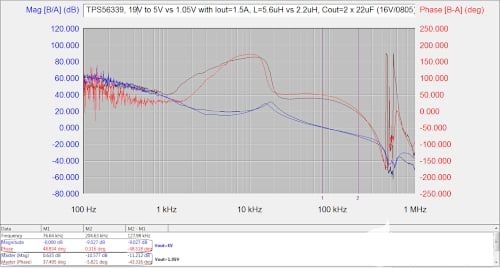
图 12.
5V 和 1.05V 输出的测量波特图。图片由
Bodo's Power Systems提供
结论
具有适用于 DC/DC 转换器的 AECM 控制拓扑的设备可以实现具有真正固定频率的快速负载瞬态响应,同时保持宽输出电压和低设计成本。这种新的控制拓扑已在多个产品中实施,具有良好的性能、易用性和较小的解决方案尺寸。
-
采用数字控制型隔离式DC_DC转换器实现快速输入电压瞬态响应2016-12-21 1620
-
DC-DC的电流反馈控制模式2023-06-07 4895
-
全桥DC-DC开关电源参考设计2025-05-23 460
-
宽泛Vin DC/DC转换的电流模式控制的探索2018-09-12 1857
-
Linear宽电压范围同步降压型DC/DC控制器LT38402018-09-27 2046
-
SPICE仿真的类型:DC分析、AC分析、瞬态分析2018-11-27 7834
-
降压型电流模式DC-DC转换器PAM23042019-03-14 2649
-
采用BD9C401EFJ的电流模式控制DC/DC转换器2020-07-27 2534
-
DC-DC同步整流降压芯片83222021-07-14 832
-
一种高效率的同步降压DC-DC变换器3A输出电流2021-11-15 1576
-
为什么使用DC-DC转换器应尽可能靠近负载的负载点(POL)电源?2021-12-01 3036
-
峰值电流模式和连续电流模式DC-DC转换器建模和环路补偿设计注意事项2023-01-06 8809
-
AECM与D-CAP2和PCM控制的瞬态响应比较2024-09-10 715
-
特瑞仕DC/DC转换器的HiSAT-COT高速瞬态响应技术2025-09-05 1124
-
LM25148同步降压DC/DC控制器技术解析与应用指南2025-09-22 1326
全部0条评论

快来发表一下你的评论吧 !
