

 非车规级传感,60GHz毫米波崛起
非车规级传感,60GHz毫米波崛起
描述
不管是生活场景还是工业场景,对更强大更全面传感技术的需求是一直存在的。近年来,毫米波(mmWave)传感器由于能够感知场景中物体的范围、速度和角度而获得了很多关注。正如在机器人移动应用中开始应用毫米波雷达,其优秀的感知能力与鲁棒性注定了它会在智能感知上大展身手,这种鲁棒性使其在室内和室外的应用中都具有强大的性能。室外,这是很重要的一点,尤其是在机器人移动应用。
完整的毫米波雷达系统包括发送(TX)和接收(RX)射频(RF)组件,以及时钟等模拟组件,还有模数转换器(ADC)、微控制器(MCU)和数字信号处理器(DSP)等数字组件。
60GHz频段,大势所趋
24GHz、60GHz和77GHz是大多数毫米波传感使用的频段,车规级应用基本都在77GHz上。而且这个频段在大多数地区都是有限制的,即便是工业场景中需要精准人机交互的应用,能被允许使用77GHz的地方也不多。工信部发布的《汽车雷达无线电管理暂行规定(征求意见稿)》将76-79GHz频段规划用于汽车雷达,并限制了其他地面雷达对该频段的使用。
(60GH毫米波雷达传感,英飞凌)
不只是77GHz受限,24GHz频段的可用带宽也开始减少,这些变化会直接影响到传感的范围分辨率、准确性和鲁棒性。雷达本来就依赖于密集的点云数据,可用带宽的减少肯定会影响整个传感的性能。在两个频段双双受限的情况下,60GHz以高精度、丰富的点云数据成为全球工业场景中雷达传感应用的最合适的选择。由于距离分辨率在很大程度上依赖于可用带宽,60GHz的毫米波传感器将提供比24GHz毫米波传感器更好的性能。半导体厂商在车规级频段之外,在60GHz频段的也加大了开发力度,不少知名厂商都在该频段布局已久。
英飞凌完全自主研发的60GHz雷达传感,能以低于5 mW的低功耗检测最远5 m的人体目标,最低功耗能降低至2mW以下,在消费级短距离定位上这种低功耗的小巧IC是最受欢迎的。
TI基于互补金属氧化物半导体(CMOS)的毫米波雷达也不必多说,一改传统毫米波雷达系统分立式的组件让人难以接受的成本和尺寸问题,集成TX-RF、RX-RF组件,集成ADC、MCU等数字组件,甚至集成DSP,将射频、处理和内存资源集成到一个单片CMOS芯片上。
60GHz毫米波传感密集点云的优势
上面说到了毫米波雷达依赖于密集的点云数据,运动检测是毫米波传感一个很标准的用例,虽然其他技术可能够完成运动检测,但对运动物体的计数和跟踪需要大量的点云数据来准确识并避免错误触发。我们可以先从点云数据中窥见60GHz能力的一二。
密集的点云数据可以识别毫米波传感器视场(FoV)中物体的数量,指示它们的位置并对它们进行分类,使用毫米波传感甚至可以识别特定的对象是什么,至于如何分类识别这里不做详细介绍,我们重点关注其点云密集度。
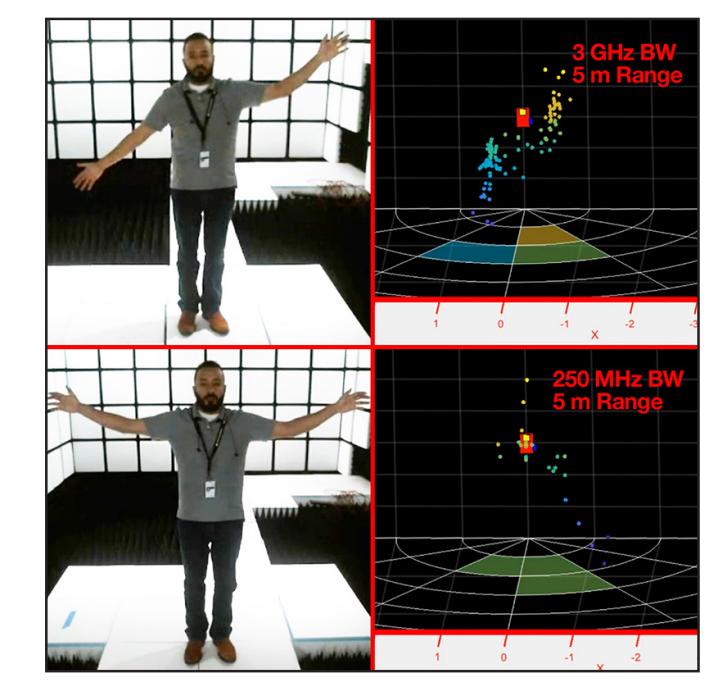
(点云比较,TI)
点云数据来自于毫米波传感器中的四个参数,在x、y和z轴上检测数据和径向的速度数据。收集对检测有意义的数据需要毫米波传感器有精细范围分辨率和速度分辨率。上图很明显能看出范围分辨率对收集丰富的点云数据的影响,24GHz的毫米波被限制在250MHz带宽时,点云密度急剧下降,其实不止点云,距离分辨率的大幅下降将影响所有的毫米波雷达传感方面的应用。
速度分辨率也是一个取决于各种参数的精细数据,它与中心频带更相关,与带宽倒没有太多联系。60GHz的中心频带更高,提供的速度分辨率大概是24GHz的2.5倍。精细的速度分辨率能够让传感器更好地跟踪横向运动,更稳定地检测移动物体。
目前60GHz和77GHz的毫米波雷达的范围分辨率都在3.75cm左右,使用250MHz带宽的24GHz传感器的最佳范围分辨率是60cm,由此得来的点云数据的密集程度精细程度显然是无法处在一个量级的。随着24GHz可用带宽的减少,用60GHz来弥补这个缺失是一个不错的选择。
一般来说,需要一个专用的数字信号处理器(DSP)来处理从传感器获取的原始数据,较弱的点云数据集虽然可以通过修改算法来进行优化获得感知所需要的数据。但问题在于,即使算法优化到能够使用更少的点云数据来提供类似高点云密度的性能,它也会需要额外的处理时间甚至更多的硬件资源,这种处理成本应该没有半导体厂商会考虑。
写在最后
用在毫米波雷达传感设计的PCB最占空间的是天线阵列,该设计需要满足FoV和增益等规格,部分设计还需要考虑雷达信号的波长。与24-GHz相比,60GHz的PCB天线部分可以减少大概6倍,对减小传感器的尺寸还是很有帮助的。
-
HMC6300:60GHz毫米波发射机的卓越之选2026-04-30 359
-
安信可60GHz毫米波雷达:高精度点云检测2025-04-29 1673
-
新品!30元左右的60GHz毫米波雷达模组重磅登场!2025-04-23 2502
-
60GHz毫米波雷达水位传感器产品说明书2025-02-27 882
-
60GHz毫米波传感器EVM2024-11-22 643
-
IWR6843AOP单芯片60GHz至64GHz毫米波传感器封装天线(AOP)数据表2024-08-14 1164
-
AWR6843AOP 单芯片60GHz至64GHz毫米波传感器封装天线 (AOP) 数据表2024-08-13 811
-
IWR6843、IWR6443 单芯片 60GHz 至 64GHz 毫米波传感器数据表2024-08-12 780
-
风波再起!60GHz雷达,走向何方?2024-06-29 179
-
德州仪器发布低功耗 60GHz 毫米波雷达传感器2023-02-11 2140
-
Socionext开发超小型60GHz毫米波雷达传感器2022-06-17 4471
-
如何使用60GHz毫米波技术助力解决无线带宽危机2020-08-25 1139
-
60GHz毫米波技术是怎么解决无线带宽危机的?2019-08-19 4037
-
60GHz毫米波通信技术发展历程概述2019-06-14 4678
全部0条评论

快来发表一下你的评论吧 !
