

DJI goggles技术细节详解
描述
因为参加了拆解的比赛,而且我的眼镜也让我研究的很深入了,正好几个设计师也想参加一下,顺理成章的就有了这篇文章。
这篇文章试图全方位,详细的,有比较的阐述关于眼镜的一切~
其实我想说一句话是,如果我未来做产品,希望消费者会说:这是工业之美,对得起它的价格。而不是说这个东西好贵,还想听到:对,没错,这就是我梦想的东西。
产品定位在此
FPV飞行
HDMI显示器
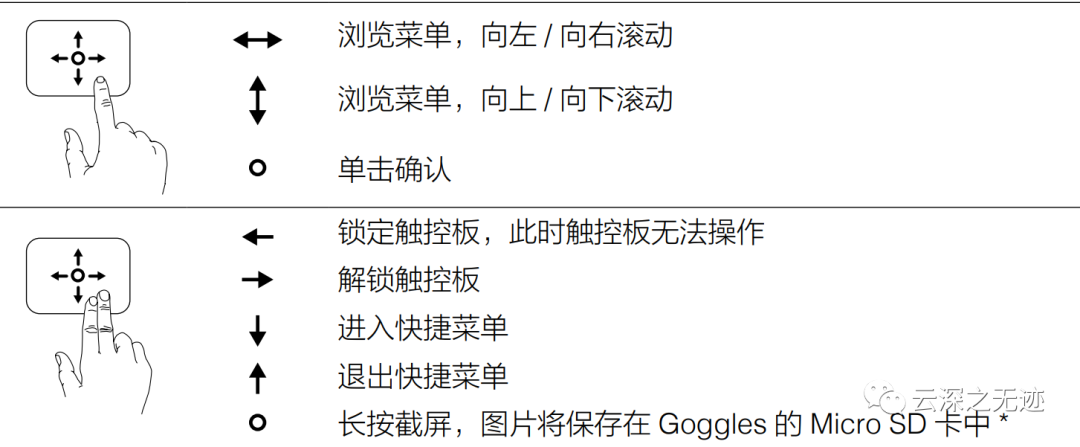
这手势是我喜欢的地方,而且表面使用了凹凸的材质处理,在盲操作的时候可以摸到。
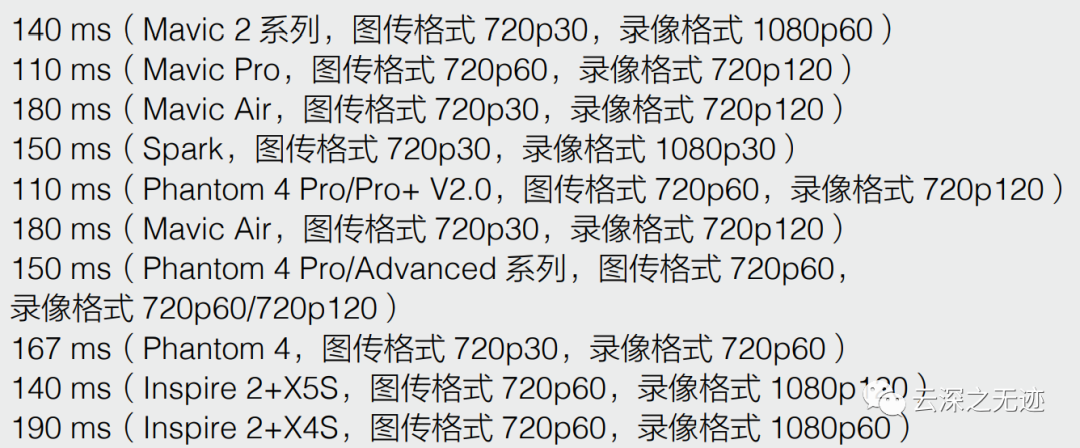
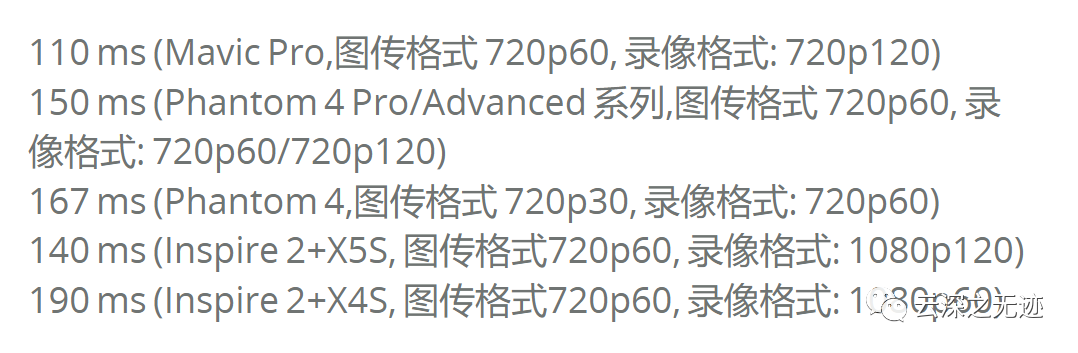
这里是我们的机器的延时测试
首先确定的一点是,这个延时的时间竞速是不行的,时间太长了。其实我自己测试的话,确实是有延时的时间,很明显。有点呆呆的感觉。
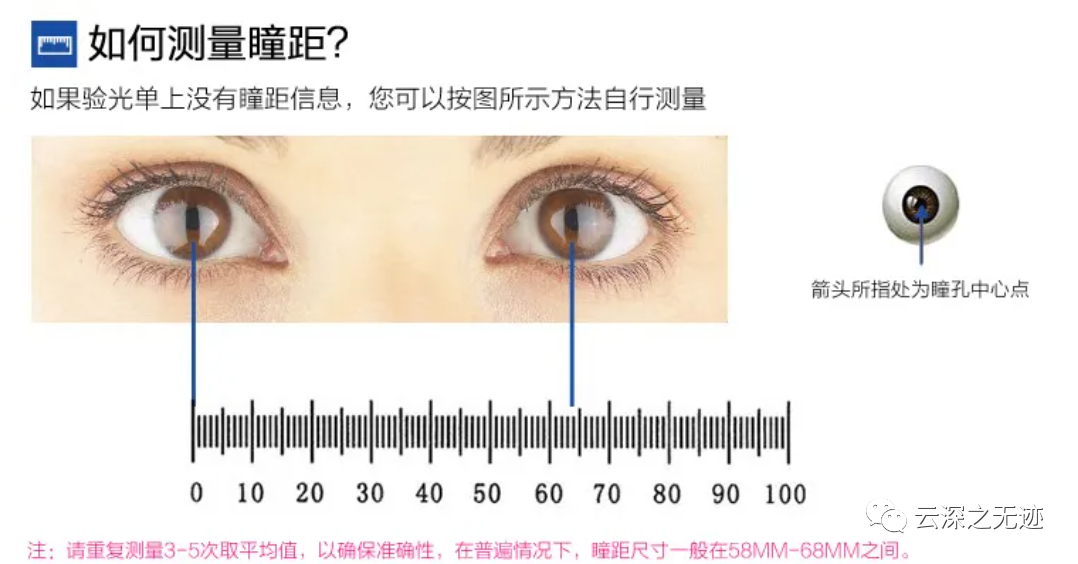
另外有一个IPO的测试,就是瞳距的测量
FPV眼镜:FPV图传接收眼镜分为两类,一种是模拟图传接收眼镜,另一种是数字图传接收眼镜。购买何种眼镜是依据飞机端的图传发射机制式而定;飞机上配置的是模拟图传发射机,那么,就需要购买配了模拟图传接收机的视频眼镜;如果是配置了大疆数字图传发射机的飞机,那就需要购买大疆配套的数字图传接收机眼镜。模拟图传眼镜和数字图传眼镜是不通用的,它们的信号编码方式不一样,如果你搞错了,是无法正常看到飞机图传画面的。
模拟图传具有较好的低延迟性能,且技术成熟度高,购买成本相对较低;模拟制式的FPV接收眼镜,也有多种较为廉价的眼罩式产品可选;在许多大型竞速比赛中指定使用模拟图传。模拟图传的画面清晰度无论如何提升预算费用,都无法和数字图传比拼,模拟图传技术的发展远没有数字图传发展那么快,性能提升非常小,未来将会被低延迟的数字图传技术所替换,这是技术发展的方向。当然,模拟图传的廉价,作为预算有限的练习阶段新手,是一个折中的选择。
模拟图传的AV复合视频编码信号在6MHz的频率带宽下只能传输大约720*480像素分辨率30帧的图像信息,所以,显示器具备更高的像素显示能力对提升画面清晰度并无太大的作用。
信号接收灵敏度是图传信号接收机的一个重要技术参数,它决定了接收机可以接收到并仍能正常解码的最低信号强度值;这是一个无线电信号强度值dBm,也可以用场强表示mV/m,常见的数值如-75dBm,负号后面的数字越大灵敏度越高如-105 dBm。在相同的接收环境和相同的接收天线下,接收机的灵敏度越高,对弱信号的接收能力就越强,飞机就能飞得更远。如果接收机使用指向性更高的天线,接收的信号将会越强,当然,定向天线需要随时对着飞机端的发射天线。一个较高增益的接收机天线,是为了接收到穿越机在较远飞行位置传回的较弱图传信号而准备的。
眼镜配件:飞机端的图传信号发射机需要配备增益较高的全向发射天线,不能使用高指向性天线,否则飞机一个转身就可以能让接收眼镜丢失图传信号,最好是使用棒棒糖或者四叶草高增益天线。FPV眼镜的电池续航时间也是比较重要的,多准备一个备用电池,在外场飞行中及时更换电池,就无需单心电压过低导致眼镜黑屏飞丢。部分FPV眼镜可以接收到飞机端传回的音频信号,如果飞机端图传板上配置了拾音器MIC,还可以听到传回的不断变化的桨叶切割空气的声音,感受电机转速的变化,可以更好地掌控油门力度。
FPV飞行操控比目视操控要容易得多。在飞行中不断寻找飞机镜头和地面参照物的远近关系变化,体会俯仰、横滚摇杆量与飞机姿态的变化关系;把握好油门的升降,防止飞机坠地,体会飞机位置和视觉环境的变化,提升FPV视角下的操控感,把动作完成得更好。
图传的取电建议直接接到电池供电上,如果使用飞控的BEC来供电,可能导致飞控发热严重或者烧毁该组BEC电路,图传发射机的工作电流是比较大的。如果图传画面有波纹,一般是飞控或者电调电路产生的干扰,可在电池输入焊盘上加上一个35V470uF以上容量的电解电容和高频瓷介电容来降低干扰。图传天线的安装要远离遥控接收机天线,以免干扰遥控指令信号的接收;飞机端图传天线要采用高增益的全向天线,让图传信号能传输得更远一些。飞控的OSD字符叠加芯片,是将摄像头画面输入其中后,再把飞控中的一些飞行参数叠加到画面上,再送到图传发射机进行无线发射的,这样在地面的接收眼镜就能在看到画面的同时也看到了飞机上飞控的飞行参数。所以,摄像头的AV复合信号出来后不是直接接到图传的AV输入端,而是先接到飞控的AV入,经过字符叠加过程,再经由飞控的AV出,接到图传发射机去。当然,如果你都不需要看飞控的那些飞行参数,摄像头的AV信号就可以直接接到图传发射机里面去。
发射天线的关键参数有增益值(dbi)、输入输出抗组(欧姆)、极化方式(垂直、水平极化)、电压驻波比等、重量;电压驻波比在1.8(反射率约8%)左右都是可以使用的,太高的驻波比数值说明发射效率更低,天线会向发射机反射更多的能量,导致发射机温度过高或者烧毁。对于图传发射机来说,一条辐射效率更好的天线是必不可少的,它可能比发射机还贵一些。
二代主要是更新了一个图传:
传统的模拟图传以低延时著称,延时范围在30到60ms之间,一般在50ms左右。而大疆官方宣称OcuSync数字图传最高分辨率能够达到960p@50fps,当分辨率降低到480p@50fps时,图传延迟时间能够达到最低50ms,已经达到了模拟图传的低延时水平。那么为什么Ocusync数字图传在传输大量数据的同时,还可以实现和模拟图传齐驱并驾的低延时呢
可以看到这个延时就好很多了
以大疆的 Mavic 2 为例,Ocusync 2.0 图传延时为 120 ms 左右,可以做到基本的实时操控。虽然数字图传会有延时,但 200 毫秒左右的滞后时间,对于相对静态的航拍画面来说,还是在接受范围之内。对于决胜于毫厘之间的竞速用穿越无人机来说,120 ms 就十分致命了。穿越机很多是以每小时 100 公里的速度飞行,即每秒速度达 27.78 米。数字图传约 0.12 秒的延时,会让实际环境和图传画质有大约 3.3 米的差距。假设你从图传画面见到还有差 3.3 米才到墙,下一刻你的飞机可能已经炸在墙头了。
为了极限操作的延迟问题,目前市面上的穿越机,大多采用了模拟图传,模拟图传不需要任何编/解码的过程,能直接把信号以最直接的方式传递,故此能把图传的延迟降至最低,一般低达 50 ms,已经可以达到纯手动控制的需求了。
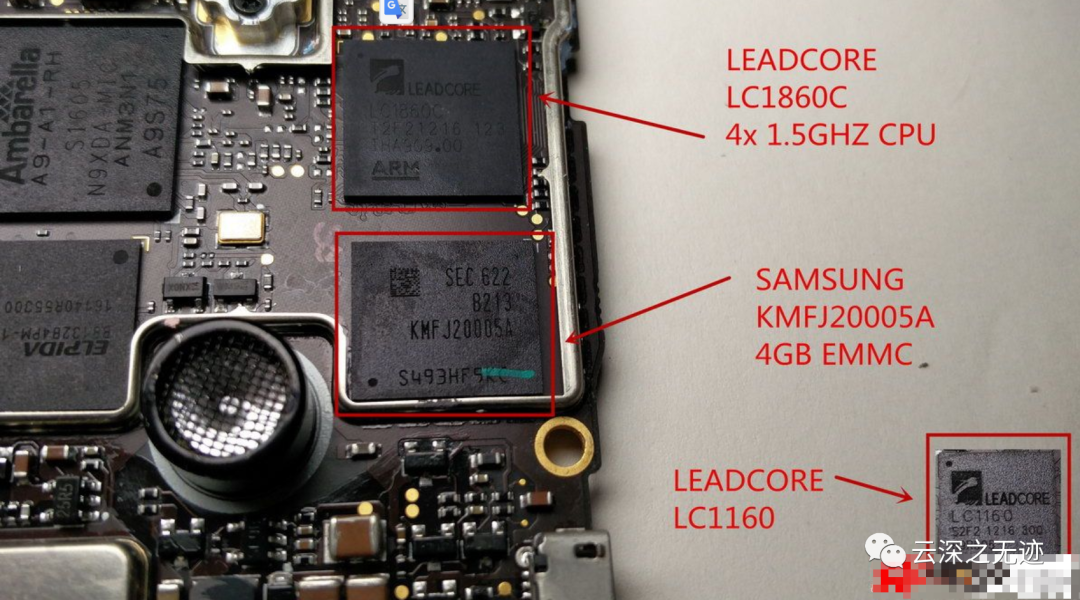
这里插一个就是下面无人机也是使用了眼镜的方案,LC1860C这个~
视频压缩处理等繁重工作依旧交给联芯的LC1860C 4核1.5GHZ CPU来解决,SEC KMFJ20005A 为三星产ROM+RAM一体化芯片,LC1160 则为电源管理芯片。
Mavic
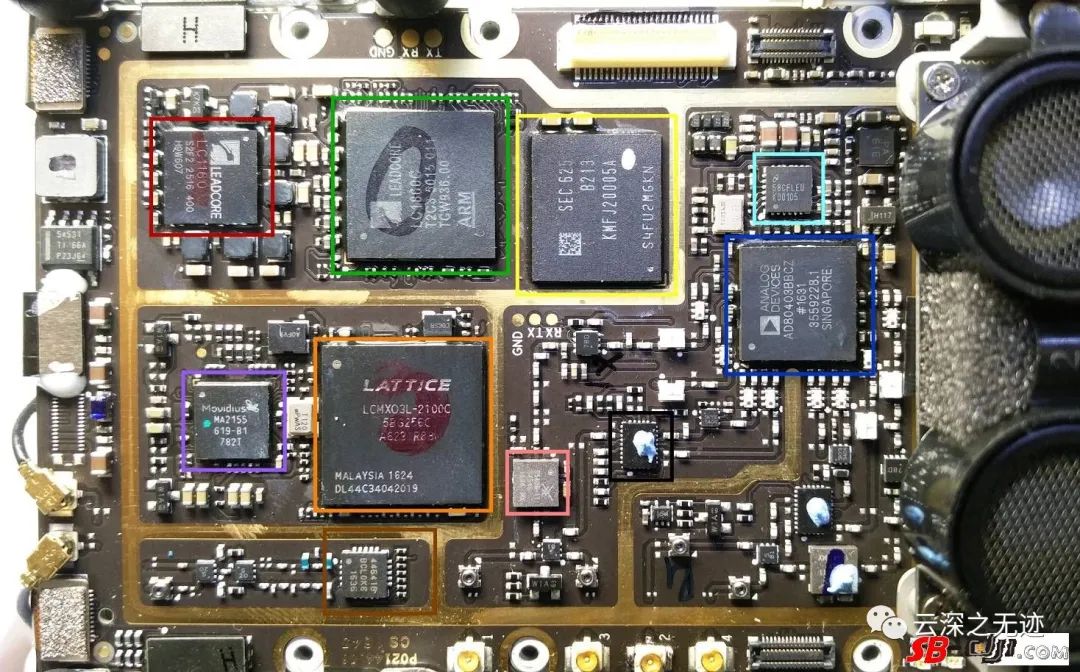
负责全机协调功能的FPGA 依旧是Lattice的FPGA方案,更换了更小封装的1200HC,存储程序的FLASH为256M
P4也是
视觉识别的核心部件来自著名的大唐电信旗下子公司联芯科技 LC1860C+LC1160
听配置很熟悉?哈哈,你可以理解为这是一部会飞的红米2A哦
绿框为核心 LC1860C 4核1.5GHZ 处理器 核心算法主要依赖内部的双核Mali-T628 GPU 零度曾于2015年发布过该方案但并未大规模商用。红框为LC1160 电源管理芯片,黄框为三星一体化内存闪存颗粒。
审核编辑 :李倩
-
应用Bluetooth Smart技术的全套智能骑行设备的技术细节和应用场景,不看肯定后悔2021-05-21 1900
-
ARM公司公开下一代ARM架构技术细节2011-11-03 1839
-
大疆VR眼镜开始发货—DJI Goggles的视界到底有什么大不同?2017-05-25 8860
-
大疆发布首款飞行眼镜DJI Goggles,用头部控制无人机2018-07-20 2229
-
MIT公布“盲动”机器人技术细节2018-07-11 3588
-
意法半导体公布ST54J系统芯片(SoC)的技术细节2018-10-10 8020
-
要想电流测得准,一定不能忽视的技术细节(第二讲)2019-07-02 3916
-
小米手表e-SIM技术细节揭露,明天发布2019-11-04 5981
-
一文解析鸿蒙系统诞生背景、技术细节生态圈2021-06-11 8547
-
聊聊50G PON的技术细节2024-04-30 223
-
深入解析Zephyr RTOS的技术细节2024-10-22 5061
-
索尼IP编码板:技术细节与应用探索2025-03-20 1316
-
揭秘徐工新能源重卡的技术细节2025-08-11 1496
-
PCIe 7.0技术细节曝光2025-09-08 3339
-
时识科技揭秘支座位移监测系统的技术细节2026-05-28 447
全部0条评论

快来发表一下你的评论吧 !
