

无刷直流电机的优势及工作原理
今日头条
描述
为了在系统中实现运动,可以使用各种电机类型,例如有刷直流(DC)电机、无刷直流电机(BLDC)、交流(AC)电机、通用电机、步进电机或伺服电机。从这些选项中,无刷直流电机电机特别具有以下优势。
·高效率
·可靠性和长寿命
·紧凑的尺寸
·低噪声
·支持广泛的电机速度
·不产生火花
无刷直流电机电机的诸多优点是为什么这种电机可用于各种应用,包括:无绳电动工具、空调输出单元以及建筑安全系统中的自动门和大门。无刷直流电机电机还用于汽车内的各个地方,例如滑动门模块、车窗模块、车顶电机模块、雨刮器模块、座椅位置和舒适模块、发动机风扇和泵。
无刷直流电机开关
详细介绍无刷直流电机电机的工作原理,图1显示了无刷直流电机电机的简化模型,该模型使用两个磁极(一个北和一个南)和三个线圈。在此模型中,转子(电机的旋转部分)上的永磁体被定子(电机的静止部分)上的线圈包围。磁铁的运动是导致转子运动的原因。线圈将根据注入其中的电流方向改变其磁极(北或南)。电磁铁对永磁体的相反极的吸引力和电磁铁对永磁体的同极的排斥使永磁体和转子运动,从而产生转矩。
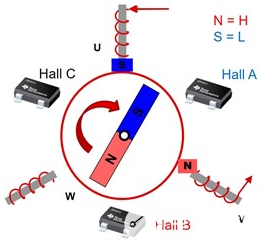
图1.无刷直流电机电机模型,换向步骤1:——
例如,如果磁铁位于图1所示的位置,并且希望使磁铁沿顺时针方向移动,则向线圈U注入电流以充当磁铁的南极,并向线圈V注入电流电流就像磁铁的北极一样。线圈U产生的S极排斥永磁体的S极,线圈V产生的N极吸引永磁体的S极,从而使永磁体和转子顺时针旋转,直到达到如图所示的磁体位置图2。从图2的磁铁位置,将电流注入线圈W以充当磁铁的北极,并向线圈U注入电流以继续充当磁铁的南极,使转子再次顺时针旋转。为了保持磁体和转子沿圆周连续移动,必须以非常特定的顺序将电流连续注入不同的线圈。切换哪些线圈有电流注入其中以引起转子运动的过程称为换向。
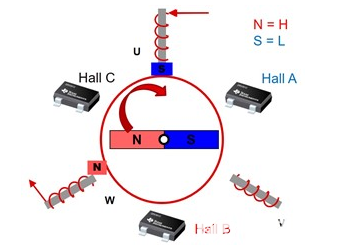
图2.无刷直流电机电机模型,换向步骤2:——
如图1和图2所示,向其中注入电流的适当线圈以及这些电流的极性取决于磁体的当前位置。无刷直流电机换向方案的工作原理是首先确定转子的位置,然后使用该转子位置信息施加磁场以使转子沿所需方向移动。有两种方法可以确定转子位置。第一种方法使用位置传感器。第二种方法是基于反电动势(EMF)确定位置的无传感器方法,反电动势是电机旋转时在电机上产生的电压。电机上产生的反电动势波形的幅度与电机的速度成正比。
传感换向的优点包括:
由于电机上产生的反电动势波形的幅度与电机的速度成正比,因此无传感器换向方案在低速下无法运行,因为反电动势太小而无法测量以确定转子位置。如果系统在零速时需要很大的扭矩,则需要传感器换向。
在非常高的电机速度下,当使用反电动势时,很难区分不同的转换。如果电机以非常高的速度移动,请使用传感器换向来缓解此问题。有传感器的实现执行起来相对简单,不需要像无传感器实现那样的复杂计算。对于传感换向,可以使用霍尔位置传感器、编码器或旋转变压器。在这些选项中,霍尔位置传感器是最常见的,因为它们的成本相对较低。从不同类型的霍尔位置传感器中,霍尔锁存器用于提供简单的六步换向方法。使用这些霍尔锁存器,需要交替使用北极和南极来切换设备的输出,如图3所示。
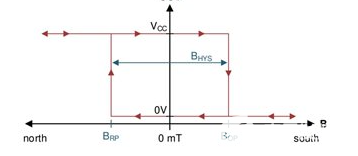
图3.霍尔传感器器的输出:——
对于图3中所示的锁存器,仅当设备检测到磁体的南极并且感测到的磁通密度的幅度大于磁通密度工作点(称为B OP)时,输出才被断言为低电平图中。输出将保持低电平,直到设备检测到磁体的北极并且感测到的磁通密度的大小大于锁存器的磁通密度释放点,在图中称为B RP。在没有磁输入的情况下,锁存器的最后状态保持活动状态。
图4显示了使用三个霍尔锁存器的有传感器六步电机换向控制方案的输出波形。在该方案中,一次仅驱动两相,其中第三相处于高阻态。图中,数字代表换向步长。步骤1具体对应图1所示状态,步骤2对应图2所示状态。图4中的霍尔A、霍尔B和霍尔C波形对应于不同换向步骤期间霍尔锁存器的输出。U相、V相和W相波形表示应用到该相以使磁体移动到其下一个换向步骤的波形。在图4,“+”对应于注入电流,使相的南极施加,“-”对应注入相反的电流,使相施加北极,“Z”指相处于高阻态。此图说明有六个独立的霍尔状态,其中每个状态对应于驱动相位以保持电机旋转的不同选项。因此,霍尔状态可用于提供有关如何驱动相位以保持电机旋转的信息,其中霍尔传感器的状态可用作软件查找表的索引,以获取有关如何驱动不同相位的信息基于转子的当前位置。
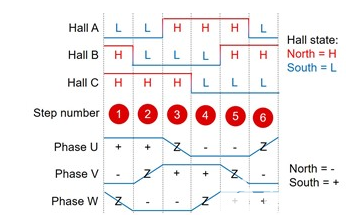
图4.六步电机换向控制方案:——
前面的示例使用无刷直流电机电机的简化模型。通常,无刷直流电机电机的磁极和线圈比图中显示的要多。使用的线圈和转子磁极越多,对磁铁的控制就越精细。磁体可以实现为多个彼此相邻的条形磁体,其中相邻的磁体具有彼此相反的极性。使用更多磁体会增加霍尔传感器在给定时间内看到的状态转换次数,从而减少转子必须旋转多少才能使霍尔传感器循环通过所有可能的状态。
三个霍尔位置传感器的放置应使其各自输出之间的角度差相互偏移120°。这个角度被称为电角度,它可能与设备彼此机械放置的实际角度不同。从电机轴的中心,每个传感器的间隔度数(机械角度)可以设置为2/[极数]×120°,以创建必要的120电气角度。
在图1和图2中简化的两极示例中,机械角和电角相等。然而,对于具有更多磁极的系统,电角和机械角不相等,因为磁极数量增加会减少循环通过不同霍尔输出状态组合的时间。为了说明这一点,假设系统中有12个磁极(6个北极和6个南极)。为了在这个12极系统中的霍尔锁存器之间获得120度的电气分离,霍尔位置传感器可以放置成机械上彼此相差±20度。
审核编辑:汤梓红
-
无刷直流电机和有刷直流电机的区别2023-03-17 10458
-
无刷直流电机的结构及工作原理2023-03-08 1678
-
无刷直流电机控制系统是什么2023-03-06 3179
-
无刷直流电机工作原理及PWM调速2021-09-15 3872
-
无刷直流电机是如何进行换向的2021-08-17 6722
-
无刷直流电机工作原理2021-08-04 28808
-
无刷直流电机的转子是怎么转动的呢?2021-07-23 3494
-
有刷直流电机与无刷直流电机的优缺点比较2021-07-20 11872
-
无刷直流电机的工作原理及控制方法2021-05-19 1900
-
无刷直流电机的原理与驱动2009-11-02 6459
全部0条评论

快来发表一下你的评论吧 !
