

GPS保护级别为机器人割草机和其他应用保驾护航
描述
自主机器人、汽车和所有其他支持 GPS 的应用程序都有一个共同点:它们永远不知道自己在哪里。这并不是说他们对自己的位置一无所知。他们根本无法确切知道他们从全球导航卫星系统 (GNSS) 接收器获得的位置输出有多准确。
标准 GNSS 接收器的精度在几米以内。具有航位推算的多星座、多频率解决方案可以可靠地实现低至约一米的精度。高精度接收器可以使用 GNSS 校正数据将精度降低到几厘米。
然而,在每种情况下,终端设备都无法获得实时位置误差。到目前为止,最好的猜测是准确度估计,计算各种输入,例如输入卫星信号的质量和 GNSS 接收器经历的其他条件。虽然这个估计确实有助于将 GNSS 接收器的可能位置缩小到一个更小的圆圈,但它为异常值打开了一扇大门:基于修改后的高斯分布的准确度估计通常只能提供 68% 的置信度。
GPS保护等级是多少?
GNSS 保护级别将精度估计的概念更进一步。它以 95% 的置信度独特地提供了经过经验验证的最大位置误差实时估计。换句话说,它增加了可能包含 GNSS 接收器实际位置的圆圈的大小,但几乎关闭了异常值的大门。输入数字:以 1 Hz 输出速率运行的 GNSS 接收器的实际位置误差将超过保护水平,每小时不超过 180 次(对于 3600 个报告的位置)。
需要明确的是,保护级别不是分配给 GNSS 接收机的静态值。与准确度估计一样,它不断演变基于从传入卫星信号中收集的信息。但是,虽然实际位置误差经常超过精度估计,但超出保护水平的情况极为罕见。对于习惯于处理概率和估计的应用程序,保护级别提供了不同寻常的确定性水平,使其对于任何数量的基于 GNSS 的用例都很有价值。
GPS保护等级的好处
考虑机器人割草机。这些缓慢移动的设备通常遵循随机轨迹穿过由地下边界线划定的土地,使用传感器防止它们撞到障碍物。这是一种在过去非常有效的方法,尤其是在不需要我们从足球和足球场中知道的完美条纹图案的环境中。所有的割草机都需要修剪每一片最后一片草叶就足够了。
但随着高精度 GNSS 技术的引入,下一代机器人割草机将能够采用更加系统和高效的方法,使用基于数字地图的实时路径规划算法。但是,有一个条件:机器人割草机需要能够可靠地避开地图上标记的禁区,例如花坛或其他禁区,例如邻近的财产。
GPS 保护级别为机器人割草机提供了一个可靠的指标,使用它可以实时调整其轨迹以适应 GNSS 接收器位置输出的质量。
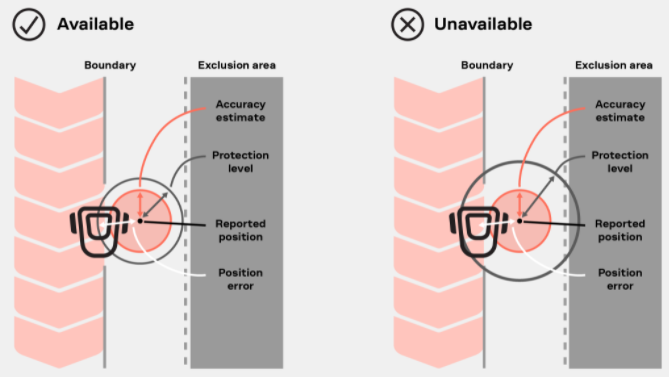
如上图所示,只要报告位置与禁区之间的距离超过保护水平,机器人割草机就会按计划运行。当保护级别增加到延伸到排除区域的点时,或者如果没有有效的保护级别值可用,则服务中断。在这种情况下,例如,割草机可以回溯到最近的可信位置。
最终,GPS 保护级别通过让割草机更靠近禁区,同时最大限度地降低进入禁区的风险来提高服务质量。
受益于 GPS 保护级别的其他应用
机器人割草机绝不是唯一受益于 GPS 保护级别的应用。基本上,任何依赖基于 GPS 的定位信息的应用程序都可以从高度可靠的位置误差上限中受益。接下来,我们简要介绍其他四个用例。
车载导航和驾驶员辅助系统
车载导航和驾驶员辅助系统可以通过消除来自 GNSS 接收器的误导性信息来提供更好的用户体验。
例如,可以仅在保护级别低于称为警报限制的预定义阈值时发布驾驶指令和警报。这也有助于防止因具有挑战性的 GNSS 信号环境而引起的重复警报。
基于无人机的测量
基于无人机的测量依赖于准确的 GNSS 数据来正确地对照片进行地理标记并进行准确的测量。当保护级别超过预定义的警报限制时,无人机的控制软件可以标记不准确的地理标记图像,或者在保护级别恢复到可接受值后返回同一位置进行新的测量。
GPS 保护级别还可以通过确保自主无人机仅在其值低于预定义的警报限制时降落来提高可靠性。
微移动
电动滑板车或共享单车越来越需要遵守禁止骑行区等市政法规。例如,为了执行这些规定,当骑手进入受限制的地理围栏区域时,电动滑板车可能会减速停止。
当保护级别超过预定的警报限制时,可以暂时中断警报,以避免错误地停止遵守法规的用户。
车队管理解决方案
车队运营商也可以从 GPS 保护级别中受益,以提高服务质量,例如,通过更容易定位停放的车辆。
例如,可以指示停放车辆中的远程信息处理系统仅在 GPS 保护级别低于特定阈值时报告其位置。
立即开始使用 GPS 保护级别!
GPS 保护等级现已在ZED-F9P-04B 高精度 GNSS 模块上提供。该模块专为与 NEO-D9C 和NEO-D9S GNSS 校正服务接收器无缝集成而设计,为客户在组装用于机器人割草机、无人驾驶汽车 (UAV) 以及半自动或全自动的经济高效、可扩展的解决方案方面提供了前所未有的灵活性机械。
关于作者
亚历克斯· 倪:u-blox 产品中心定位工业导航和机器人产品经理
审核编辑:郭婷
-
基于米尔RK3576核心板的国产割草机器人解决方案2026-04-24 473
-
信为通讯RTK天线百万套交付!割草机器人RTK定位天线首选品牌2026-03-31 409
-
智能割草机器人行走轮无感FOC解决方案2025-06-18 2490
-
国内割草机海外受欢迎 RK3588割草机器人应用解决方案2025-06-17 1383
-
科沃斯GOAT系列割草机器人搭载旭日5芯片2025-02-14 1574
-
从扫地机器人到割草机器人,科沃斯再度全平台搭载地瓜机器人旭日系列芯片2025-02-13 1643
-
基于RK3588的割草机器人应用解决方案2024-09-13 1757
-
爱普生高精度惯性导航模块赋能无人割草机新赛道2024-04-01 1472
-
EPSON爱普生高精度惯性导航模块赋能无人割草机新赛道2023-12-19 1929
-
机器人割草机开源分享2023-06-15 2238
-
草坪新赛道,广和通助力割草机器人步入智能化新时代2023-03-23 1198
-
如何为光伏电站保驾护航?2021-03-16 1825
-
欧洲将成为机器人割草机规模最大的市场2019-09-14 2044
-
自动割草机器人的设计2010-11-22 783
全部0条评论

快来发表一下你的评论吧 !
