

基于DM642的嵌入式图像型火灾探测系统
处理器/DSP
描述
引言
火灾是最常见的严重灾害之一,它往往给人们的生命财产造成巨大的危害。目前用于火焰探测的主要有烟感探测器、红外探测器、紫外探测器等,但这些探测器件在探测范围和抗干扰等方面还存在不少问题。本文提出了一种根据火灾火焰的特征,采用DSP技术对火灾火焰进行识别,并给出了其算法实现。
1 火焰图像的特征判据
1.1 面积变化率
火焰在发生的初期,火焰的出现是一个从无到有且不断扩张蔓延的过程,由于风力、空气流动、热量驱动等原因,火焰火苗会不断跳动。火焰的这一物理特性在图像上的表现就是:高亮区域的面积是不断变化的,并且连续几帧图像中,高亮区域的面积是呈增长趋势的。
定义面积变化率为:

式中:AR表示相邻帧间高亮区域的面积变化率;A(n)表示当前帧中可疑区域的面积;A(n+1)表示下一帧中可疑区域的面积,eps为一个极小值,在分母上加上eps是为了防止相邻两帧图像中都不存在可疑火焰区域而使得计算出的面积变化率成为无穷大。为了实现归一化,取两帧中高亮区域面积的最大值作为上式的分母,这样可以使得最终计算出的结果介于O~1之间。通过Matlab仿真分析,得出火焰的面积变化率范围为0.1~O.4,固定光源的面积变化率接近于O,快速闪动的物体面积变化率接近于1。
1.2 圆形度
形状特征是图像表达、图像检索以及图像分类识别的一个重要特征。通过观察大量的火焰以及干扰物体图像会发现:一般的火焰不具有规则的形状,其边缘呈现为不规则的曲线,而手电筒、白炽灯以及蜡烛等干扰光源往往具有比较规则的形状。据此,本文引用了圆形度的概念,用其表征物体边缘的复杂程度,并将其作为区分火焰以及干扰光源的一个特征。
圆形度定义为:

式中:Ck表示编号为k的图元的圆形度;Pk为第k个图元的周长,即可疑图元的边界长度,可以通过计算边界链码得到,在边界链码中,水平和垂直方向的链码步长为单位长度1,对角线方向的链码步长为

1.3 利用DSP实现图像型火灾探测系统的必要性
(1)目前许多火灾探测系统都是采用传统感温、感烟传感器,这种系统有很多缺点,误报率非常高,受环境限制,而且这种系统不能掌握火灾现场的情况,不能依靠其来进行实时调度等工作,虽然其单个传感器价格较低,但是由于每个监控范围小,必须安装多个各种传感器才能有稍微较好的性能。
(2)基于PC的图像处理的火灾监控方法,其对于图像采集一般采用摄像头与图像采集卡或者摄像头加图像译码器的结构,然后再把采集的图像传输到后台进行处理,大大增加了监控台的负担。
1.4 基于DSP图像型火灾探测的优点
为了克服传统的感烟火灾探测系统的弊端和许多特殊环境无法使用的问题,可以利用DSP开发出适应不同环境图像型火灾探测系统来满足不同环境的需要,其具有很高的灵活性。而且DSP芯片是一种特殊的微处理器,是高性能系统的核心,它不仅具有可编程性,而且它实时运行的速度远远超过通用微处理器。其特殊的内部结构,强大的信息处理能力以及较高的运行速度,是其重要的特点。它能实时地对大量数据进行数字技术处理。这种实时能力使DSP在图像火灾探测领域应用的十分理想。随着DSP芯片的发展,DSP系统的成本、体积、重量和功耗等逐渐下降,时钟频率、处理速度、处理精度等逐渐提高,对图像型火灾探测系统的发展都起到了很大的促进作用。
2 DSP技术及其开发流程
2.1 DSP芯片介绍
数字多媒体处理器DM642是TI公司C6000系列的一款新型高性能DSP,基于C64x内核,扩展的高级甚长指令字(VeloeiTI)体系结构,具有64个32位通用寄存器,8个独立计算功能单元(2个乘法器,6个算术逻辑单元)可以并行运行,因此多条指令可同时执行。可工作在600 MHz时钟速率,在此工作频率下,所有功能单元能稳定可靠的工作,外部总线时钟为100 MHz。每个指令周期可并行运行8条32位指令,因此可达到4 800 MIPS的峰值计算速度。DM642采用两级缓存结构,L1P,L1D,L2。DM642具有64个独立通道的EDMA(扩展的直接存储器访问)控制器,负责片内L2与其他外设之间的数据传输。容量较大的两级缓存和EDMA通道是DM642高性能的体现之一,若能合理使用和管理,将能大幅度提高程序的运行性能。它带有3个可配置的视频端口,提供与视频输入、视频输出以及码流输入的无缝接口。这些视频端口支持许多格式的视频输入/输出,包括BT.656,HDTVY/C,RGB以及MPEG-2码流的输入。DM642的其他外设包括:10/100 Mb/s的以太网口(EMAC)、多通道音频串口(McASP)、外部存储器接口(EMIF)、主机接口(HPI)、多通道缓冲串口(McBSP)以及PCI接口等。
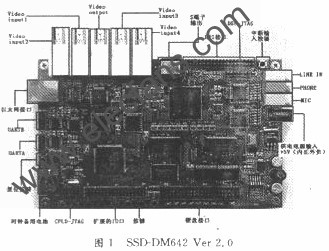
2.2 DSP视频处理开发平台
本文用于DSP开发的平台SSD-DM642 Ver 2.0(见图1)是索思达公司出品的基于TM320DM642一款可用于多路视频监控、视频服务器、数字视频录像机等场合的嵌入式平台。
2.3 集成开发环境CCS
采用由TI公司推出的用于开发DSP芯片的集成开发环境CCS(Code Composer Studio)。它采用Windows风格界面,集编辑、编译、链接、软件仿真、硬件调试以及实时跟踪等功能于一体,极大地方便了DSP芯片的开发与设计,是目前使用最为广泛的DSP开发环境之一。CCS有两种工作模式,即软件仿真器和硬件在线编程。软件仿真器工作模式可以脱离DSP芯片,在PC上模拟DSP的指令集和工作机制,主要用于前期算法实现和调试。硬件在线编程可以实时运行在DSP芯片上,与硬件开发板相结合进行在线编程和调试应用程序。利用CCS集成开发软件,用户可以在一个开发环境下完成工程项目创建、程序编辑、编译、链接、调试和数据分析等工作环节。使用CCS开发应用程序的步骤为:
(1)打开或创建一个工程项目文件(project),包括源程序(C或汇编)、目标文件、库文件、链接命令文件和包含文件。
(2)编辑各类文件。可以使用CCS提供的集成编辑环境,对头文件(*.h文件)、链接命令文件(*.cmd文件)和源程序(*.c,*.asm)进行编辑。
(3)对工程项目进行编译。如出现语法错误,将在构建(Build)窗口中显示错误信息。用户可以根据显示的信息定位错误位置,更改错误。
(4)对结果和数据进行分析和算法评估。用户可以利用CCS提供的探测点、图形显示、性能评价等工具,对运行结果、输出数据进行分析,评估算法性能。主程序流程如图2所示。

3 基于DM642的嵌入式图像型火灾探测系统实现
根据防火规范和系统的功能要求,相应的火灾探测报警和灭火系统软件也应具有如下特点:
实时性 火灾报警系统是一个实时控制系统,对于系统响应时间要求较高,所以对应用软件的执行速度有一定的要求,即能够在采集现场数据后,在允许的时间间隔内,及时对数据进行计算、处理、并做出正确判断,对系统进行控制。
灵活性和通用性 为了节省内存和具有较高的适应能力,软件采用模块化结构,在编写程序的时候,采用自顶向下的分析方法,将整个软件系统划分为若干个软件功能模块,然后针对每一个功能模块编写子程序。以后如果需要添加功能或修改现有功能,只需要添加或修改子程序即可。
本文利用SSD-DM642 Ver 2.O评估板卡为开发研究平台,对图像型火灾系统做进一步的软件开发的研究。
软件系统的总体框架如图3所示。

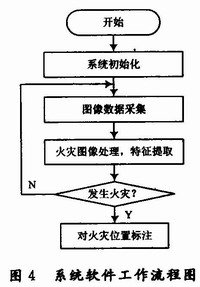
各个系统的子模块是在主系统控制模块的控制和管理监督下协调工作的。系统的工作流程图如图4所示。
(1)系统加电开始运行,运行系统初始化模块,设定寄存器初始值,进行存储器的映射,建立系统工作的环境。
(2)运行图像采集模块,采集连续帧图像,寻找背景图像,存储背景图像,并进行图像动态比。
(3)运行图像处理火灾识别模块,对可疑目标进行图像处理、特征提取,并把提取的特征与预设的阈值DT比较,若小于门限阈值DT,则可以认为是其他干扰信号,从而跳转到第二步,继续监视。
(4)若提取的特征值超过预设门限,就确认为火灾发生。
4 实验结果
在充分了解系统运行方式和对算法的Matlab仿真无误的情况下,进行图像型火灾识别算法的DSP实现。由试验的结果(见图5)来看,取得了较为理想的运行结果,为算法的进一步实际应用打下了良好的基础。

5 结语
研究了基于DSP的图像型火灾探测技术开发的基本流程,并结合自适应图像型火灾探测算法,利用开发板对算法进行了验证,下一步将经过编译的代码利用代码优化器进行优化,提高代码效率,并且开始研究DSP硬件设计问题。
-
DM642 EVM开发平台DM6422011-08-10 2805
-
DM642图像采集系统用EDMA进行数据存取使用的FIFO是什么?2013-05-07 2516
-
分享一款不错的基于TMS320DM642的嵌入式图像识别方案2021-05-18 1690
-
DM642在网络视频传输系统中的应用2009-03-17 900
-
基于DM642的嵌入式人脸检测与追踪系统研究The Rese2009-06-04 506
-
基于DM642评估板的图像编码优化技术2009-08-31 746
-
基于DM642的全景图像处理系统设计2010-01-13 792
-
基于DM642的EDMA图像处理系统2010-09-15 2202
-
基于DSP_BIOS大空间网络型火灾探测系统设计2012-03-01 728
-
基于DM642的红外测温与图像处理算法研究2017-02-07 1357
-
DM642机器视觉系统的设计2017-10-30 1268
-
基于DM642的EDMA图像处理系统2017-12-02 1044
-
基于DM642嵌入式无线视频监控硬件设计2019-01-31 970
-
如何使用DM642进行图像处理平台硬件设计的资料说明2019-05-05 1528
-
基于DM642机器视觉系统的设计与实现概述2021-03-25 1023
全部0条评论

快来发表一下你的评论吧 !
