

浅谈机器人视觉抓件系统不到位问题
描述
最近视觉抓件系统一直会出现抓取零件不到位的问题。下面我将分析一下问题出现的原应。
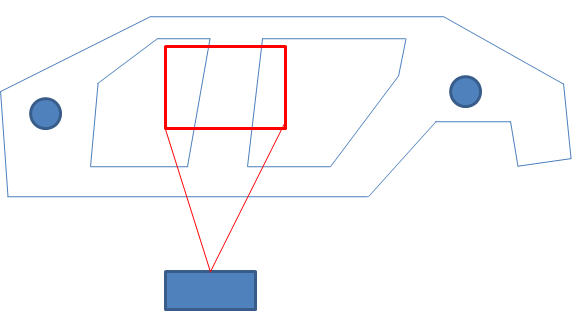
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量。因此对于车身整体的变化量存在偏差。零件大的组装件容易出现这种问题。因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法。
1.车身侧围内板:
应设置两个相机对应机器人抓手上的定位销附近,计算两个定位空的偏差值。由于机器人抓手是固定的所以,要计算出两空的变化对应车身坐标系的整体变化值。这样计算出的机器人BASE坐标系下的偏差值最准确,机器人的抓取效果最好。
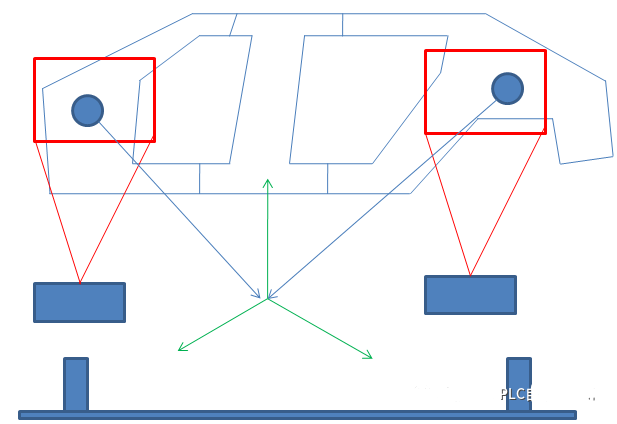
如果机器人抓手不使用定位销定位,则可以使用一个相机的方法进行粗略抓取,问题会很少。
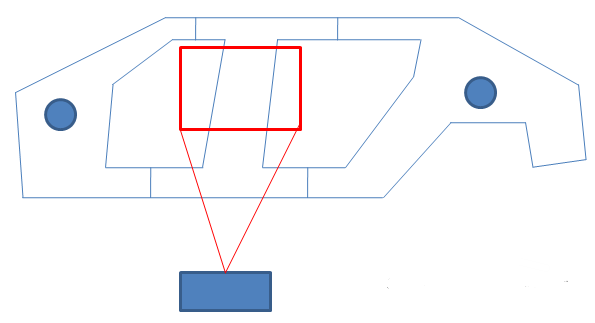
2.车身侧围外板:
侧围外板是一个整体件,用一个相机照车身B柱是没有问题的。整体大件由于不需要搭接工艺,因此可以使用一个相机和定位销定位抓取的方法。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机器人
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
码垛机器人夹抓可以实现多少种用途2018-08-15 1048
-
LabVIEW 的Tripod 机器人视觉处理和定位研究2019-06-01 2826
-
基于图像的机器人视觉伺服系统该怎么设计?2019-09-27 4282
-
服务机器人的视觉系统怎么设计?2020-04-07 3313
-
机器人视觉与机器视觉有什么不一样?2020-08-28 2619
-
深圳机器人上下料视觉定位流程讲解2021-04-07 1356
-
四元数数控:工业机器人使用机器视觉系统的原因2021-04-29 1337
-
工业机器人与视觉实训平台介绍2021-07-01 1733
-
机器人视觉系统研究2021-09-07 2303
-
Tripod机器人视觉系统2018-03-27 1105
-
机器人视觉抓取问题出现的原因和解决方法2022-07-08 3744
-
大众机器人视觉抓取问题及抓取步骤2023-03-24 1515
-
机器人视觉抓件系统抓取零件不到位的原因2023-03-30 1025
-
大众机器人视觉抓件系统出现抓取零件不到位的问题2023-04-17 740
全部0条评论

快来发表一下你的评论吧 !
