

什么是VR位置追踪,VR位置常见追踪方案
描述
1. 什么是 VR 位置追踪
我们常说的 VR 位置追踪,主要是指 头显、控制器的位置跟踪(6Dof)
1.1 VR 定位参考标准
追踪(Tracking)
- 6Dof(定位、旋转、移动),360°
- 精度(毫米级)
- 抗噪(无抖动噪音)
- 追踪范围(追踪范围、视域)
- 多目标追踪
延迟(Latency)
- 动作发生到屏幕显示 < 20ms
2. 常见追踪方案
2.1 无线追踪
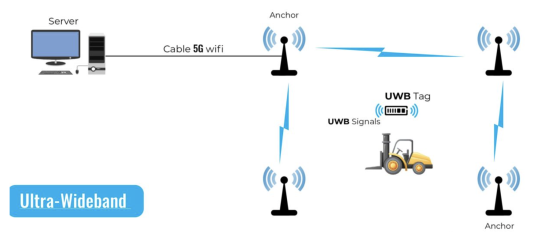
无线追踪使用一组定位器,围绕跟踪空间的周边放置,并且跟踪一个或多个标签。该系统在概念上与 GPS 类似,有时也称为室内 GPS 。标签 三角剖分 使用围绕周边放置的锚点来确定其 3D 位置。常见无线方案有IR、RFID、蓝牙、WiFi、UWB等
优点:用户体验不受限制的运动,允许更大范围的运动
缺点:低采样率会降低精度,相对于其他传感器,延迟较高
2.2 声学追踪
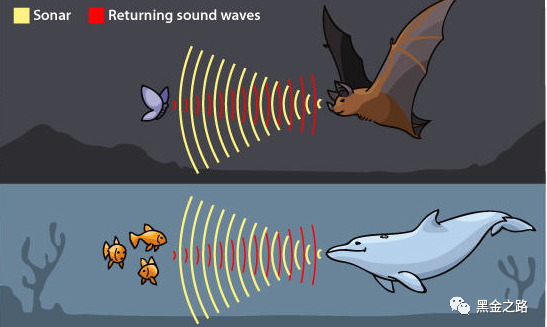
声学跟踪系统使用类似于动物的自然识别技术来识别物体或设备的位置回声定位。类似于蝙蝠使用到两只耳朵的声波返回时间的差异来定位物体的方法,VR 中的声学跟踪系统可能会在设备上使用至少三个超声波传感器和至少三个超声波发射器的集合,以计算物体的位置和方向(例如手持控制器)。
有两种方法可以确定物体的位置:测量声波从物体表面的飞行时间。发射机通过接收传输到接收器或正弦声波的相位相干
优点:精确测量坐标和角度,传感器小巧轻便,在设计中具有更大的灵活性 设备便宜且易于生产,且无电磁干扰
缺点:基于环境温度,大气压力和湿度的声速变化会导致距离计算中的误差 范围有限,并且在发射器和接收器之间需要直接的视线 声音干扰(即周围环境中的其他声音)可能会影响读数
2.3 磁跟踪
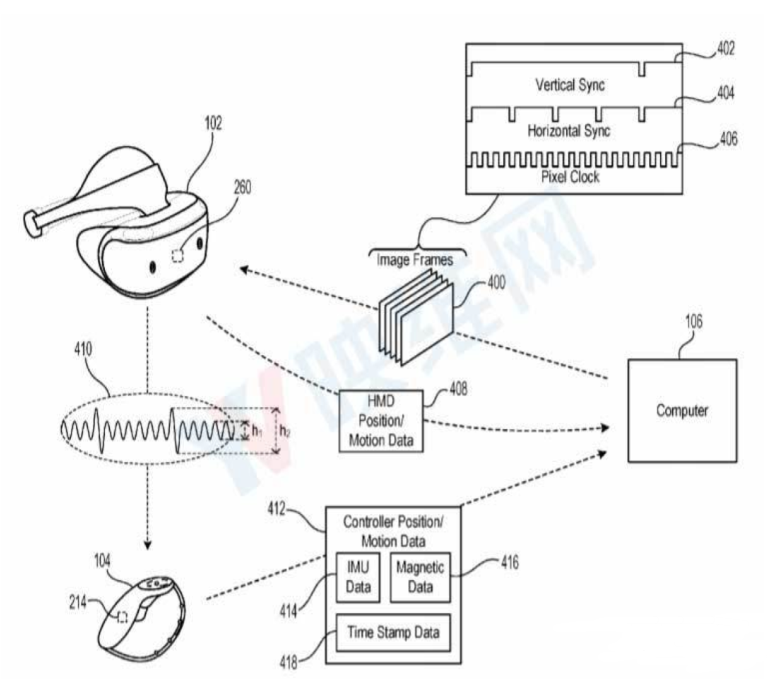
电磁追踪系统一般由电磁场发射器、接收器和电子控制单元组成,利用安装在人体上的传感器。电磁场发射器使用交流电或者直流电发射低频电磁场,作为传感器的接收器安装在人体上测量磁通量的变化。发射器和接收器都连接到电子控制单元,电子控制单元输出传感器捕获的数据到计算机,以用来推算被踪物体或部位6自由度的位置和方位
优点:使用不需要用户佩戴且不会干扰虚拟现实体验的非干扰性设备;适用于完全身临其境的虚拟现实显示器
缺点:用户需要靠近基极发射器;金属或干扰电磁场的物体附近的跟踪恶化;由于频繁的校准要求,往往会有很多误差和抖动
2.4 惯性追踪
惯性跟踪主要利用 加速度计 和 陀螺仪技术。加速度计可测量线性加速度。由于位置相对于时间的导数是速度,速度的导数是加速度,因此可以对加速度计的输出进行积分以找到速度,然后再次对其进行积分以找到相对于某个初始点的位置。 陀螺仪 解决 角速度。角速度也可以积分以确定相对于初始点的角位置。惯性测量单位系统(IMU) 基于 MEMS技术 允许以高更新率和最小延迟来跟踪空间中的方向(横摇,俯仰,偏航)。
航位推算 用于跟踪位置数据,该位置数据通过更新用户的运动变化来更改虚拟环境。虚拟现实系统中使用的航位推算更新率和预测算法会影响用户体验。仅依靠惯性跟踪来确定精确位置非常困难,因为 航位推算 导致漂移,因此在虚拟现实中常与光学追踪配合使用(一般用IMU数据做辅助矫正)
优点:可以很好地跟踪相对于其他传感器的快速运动,尤其是与其他传感器结合使用时;能够获得高更新率;
缺点:容易产生错误,由于推算错误,这些错误会迅速累积;确定位置时的任何延迟或计算错误都会导致用户出现恶心或头痛等症状;可能无法跟上移动速度太快的用户;惯性传感器通常只能在室内和实验室环境中使用,因此室外应用受到限制;
2.5 光学追踪
光学跟踪使用头戴式眼镜或放置在头戴式眼镜上的摄像头,根据相关计算机视觉算法实现 3D 位置追追踪。在光学跟踪中,将对摄像机进行校准,以确定到物体的距离及其在空间中的位置。
光学系统 是可靠的且相对便宜,但它们可能难以校准。此外,该系统需要没有遮挡的直接光线,否则它将接收错误的数据
2.5.1 标记
1)标记跟踪方案
将具有已知模式的目标用作参考点,相机会不断寻找这些标记,然后使用各种算法(例如, POSIT算法)以提取对象的位置。标记是可见的,例如已打印 二维码,反光材料等。主动实施的功能是带有内置 IR LED 灯的标记,可以打开和关闭该灯以与摄像机同步,从而更容易在跟踪区域中遮挡其他 IR 灯。被动实现是 后向反射镜 它将红外光以很小的散射量反射回光源
2)无标记跟踪方案
不需要任何预先放置的目标,而是使用周围环境的自然特征来确定位置和方向
2.5.2 Outside-in
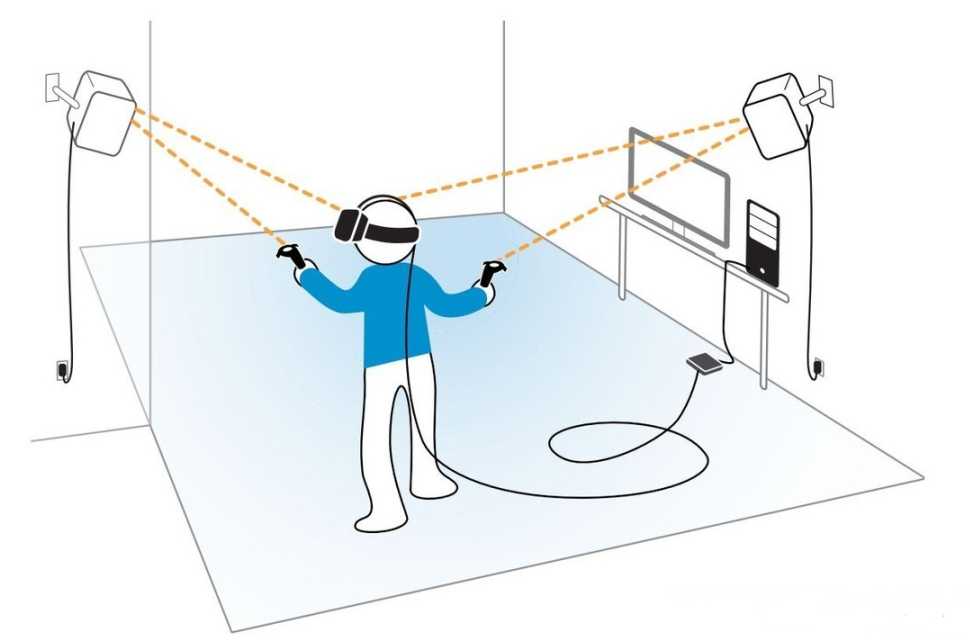
在这种方法中,将摄像机放置在环境中的固定位置,以跟踪被跟踪设备(例如头戴式显示器或控制器)上标记的位置。拥有多个摄像头可实现同一标记的不同视图,并且这种重叠可实现设备位置的准确读取。例如 HTC Vive。每个外部 Lighthouse 模块均包含IR LED以及在水平和垂直方向扫描的激光阵列,并且眼镜和控制器上的传感器可以检测到这些扫描并使用时序来确定位置。该方法是最成熟的方法,不仅在VR中应用,而且在电影的运动捕捉技术中都有应用。但是,此解决方案空间有限,需要在设备的恒定视角下使用外部传感器。
优点:可以通过添加更多摄像头来提高更准确的读数。延迟比内外跟踪更低
缺点:遮挡,摄像机需要直接的视线,否则跟踪将不起作用。需要外部传感器意味着游戏空间有限
2.5.3 Inside-out
在这种方法中,将摄像机放置在被跟踪设备上,并向外看以确定其在环境中的位置。使用该技术的眼镜具有多个面向不同方向的摄像头,以获取其整个周围环境的景象。此方法可以使用或不使用标记。
例如 微软 HoloLens ,不需要在外部环境中安装任何东西。它使用眼镜上的摄像头执行以下过程 SLAM(无人机主要使用 VIO),或同时进行本地化和地图绘制,其中实时生成环境的 3D 地图。然后,机器学习算法使用特征检测来重建和分析其周围环境,从而确定眼镜在该 3D 地图中的位置。Oculus Quest、Google Tango、PICO都在研发自己 inside-out技术
优点:提供更大的游戏空间,可以扩展到适合房间。适应新环境
缺点:需要更多的车载处理。延迟可能会更高
参考文档:
https://zhuanlan.zhihu.com/p/66731938
https://wikichi.icu/wiki/VR_positional_tracking
-
浅谈VR的三大追踪定位技术2022-10-14 3928
-
仅需580元!自制VR全身追踪器 第二期 slimevr 全中文教程 高精度全身追踪 owotrack-2露露Mikuru 2022-02-21
-
手势追踪技术将应用到VR手语场景2020-11-13 3313
-
基于蓝牙的位置追踪服务解决方案2020-10-09 7366
-
基于位置的VR可以让人们便捷的体验VR2020-01-15 1245
-
Fundamental VR手术应用最新增加眼球追踪功能2019-12-13 1127
-
什么是眼球追踪?为什么对VR如此重要?2019-07-04 8983
-
美国打造了一套新的VR系统 可以用WiFi信号对用户进行位置追踪2018-11-29 1493
-
什么是VR的预测追踪2018-07-12 2491
-
VR光学跟踪方案之“Lighthouse”追踪系统技术2017-10-09 1660
-
索尼新专利曝光!大幅提升PS VR追踪性能2017-02-14 1078
-
大爆料!三星Gear VR第二代产品将支持面部和眼球追踪?2016-12-01 621
-
高通推出一款位置追踪头戴VR设备 代号骁龙VR8202016-09-02 888
全部0条评论

快来发表一下你的评论吧 !
