

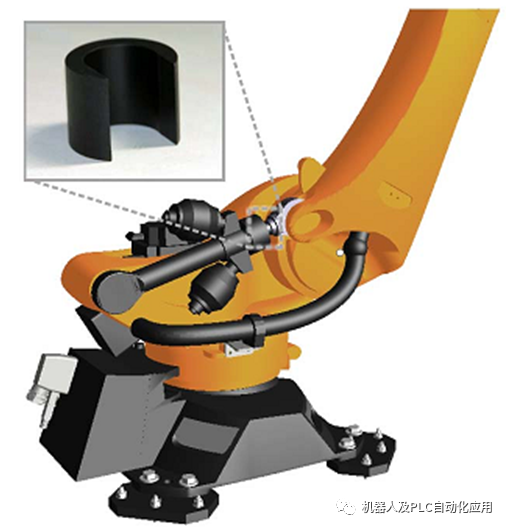
KUKA C4更换机器人的2轴平衡缸
描述
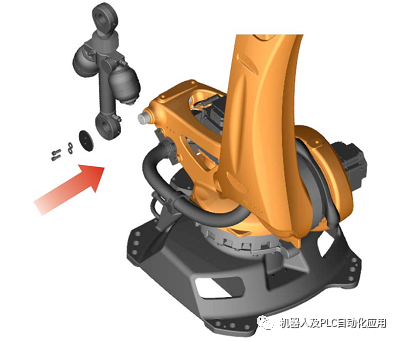
拆卸平衡配重
本节中介绍(在工作压力下)拆卸平衡配重方面的工作。
机器人必须能绕轴 2 运动。
所需辅助工具
间隔块,件号:00-194-012
螺栓固定件,件号:00-190-253
M 16 拔销器,件号:00-131-687
滚动轴承润滑脂 LGEP2(400g 筒装),件号: 00-119-990
挂装设备 (滑轮)
在平衡配重处进行拆卸和安装作业时有挤伤小臂、手和手指的危险。请佩戴劳保手套并防止平衡配重坠落和意外运动。平衡配重约重 40 kg。平衡配重承受着压力。在该系统进行任何作业时均须小心谨慎并具有相应的知识。操作不当时有生命危险。
沿正向移动机器人,使间隔块落位于活塞杆上。

2.将间隔块置于鱼眼接头与液压缸之间敞露的活塞杆上,为此,将橡胶波纹管往后推。


3.将大臂小心地往负向移动,直到间隔块直着固定好。
4.用合适的设备 (如起重机)固定平衡配重。
5.拧出四个内六角螺栓及碟形垫圈,并取下止动垫圈。 使用拔销器,将螺栓
从大臂中拔出,然后小心地将大臂沿正向移动。
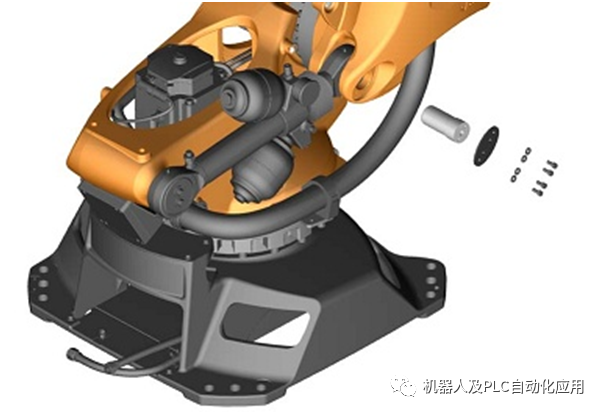
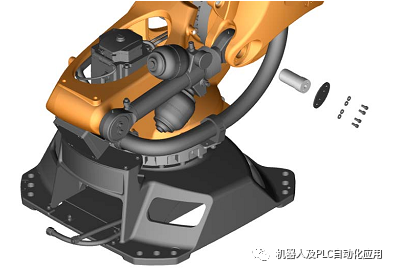
6. 旋出两个内六角螺栓及止动垫圈,取下旋转机体盖板,小心地从旋转机体的螺栓上取下平衡配重。
7. 将平衡配重往上抬起。 其间取下止推垫圈和定距环。
8. 将平衡配重放在一块合适的垫子上。

安装平衡配重
操作步骤 1. 用合适的设备固定大臂,然后运送到安装地点。
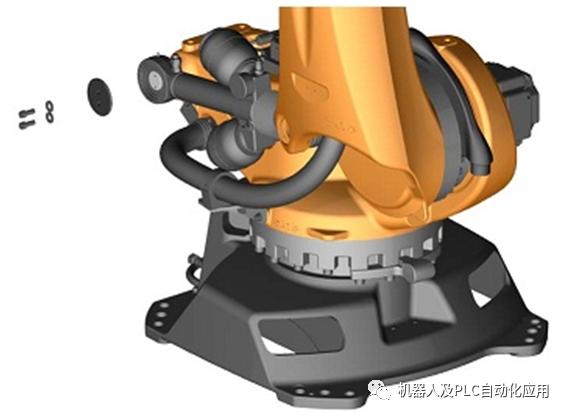
2. 将平衡配重从侧面套到插在旋转机体中的螺栓上并校准。
将平衡配重 (GWA) 安装到旋转机体上
3. 装上盖板,并用两个内六角螺栓 M12 x 30 / 10.9 和碟形垫圈固定。 (转
矩:104 Nm)
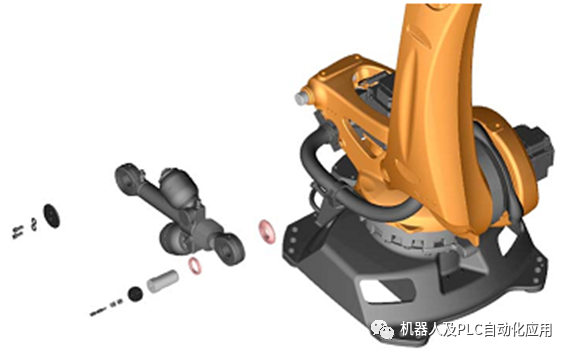
4. 为了将阶梯螺栓插入大臂,钻孔必须对齐。为此:
移动大臂,直到可将平衡配重装入大臂中。
降下平衡配重
将鱼眼接头连同止推垫圈和定距环一起插入大臂并对齐
5. 使用下列特殊工具插入螺栓:用于将螺栓装入大臂的装入工装
6. 套上止动垫圈,并用四个内六角螺栓 M8 x 20 / 10.9 和碟形垫圈固定。 (拧紧扭矩 = 31Nm)
7. 沿正向移动大臂,直到间隔套筒可自由活动,随后取下间隔套筒。

8. 检查平衡配重的工作压力。
所使用的专用工具;
GWA 活塞杆夹紧装置

用于将螺栓从大臂中取出的拔出工装


防止轴承卡在 (大臂)螺栓上的专用工装
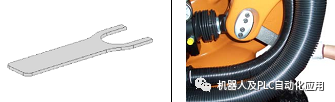
用于将螺栓装入大臂的装入工装

------------------END---------------------
审核编辑 :李倩
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3858
-
KUKA C4机器人零点校正V4.8版2023-04-14 2435
-
KUKA8.2系统下C4机器人虚拟外部轴E1的设置深层分析2022-11-29 2669
-
KUKA C4机器人报:KSS13012<{总线识别号}>ECat Stack初始化时出错2022-03-17 9640
-
KUKA库卡机器人MGV电源模块维修PH1013-28402022-01-12 1623
-
KUKA机器人伺服驱动模块维修2021-09-17 1855
-
库卡机器人MGV电源模块维修2021-09-08 1835
-
ABB机器人6640机器人平衡缸总装图及拆卸步骤详解2020-09-30 18695
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 7989
-
安川机器人维修保养的相关调试方法介绍2020-09-08 4500
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12335
-
KR C4机器人和LBR iiwa机器人的不同之处2019-07-08 2599
-
库卡机器人基础教程和库卡C4编程指南及焊接机器人教程合集免费下载2019-04-22 5515
-
KUKA重型机器人2015-02-03 8272
全部0条评论

快来发表一下你的评论吧 !
