

基于OpenHarmony系统和小凌派RK2206开发板的避障小车
描述
1避障小车简介
这是一款基于OpenHarmony系统和小凌派-RK2206开发板的避障小车。同时,小车上搭载了超声波测距模块、舵机模块、红外寻迹模块、直流电机模块。
具体实验成果展示如下:
2避障小车模块介绍
小凌派-RK2206开发板的示意图

小凌派配置了一个E53外接拓展口,这是E53接口的原理图:
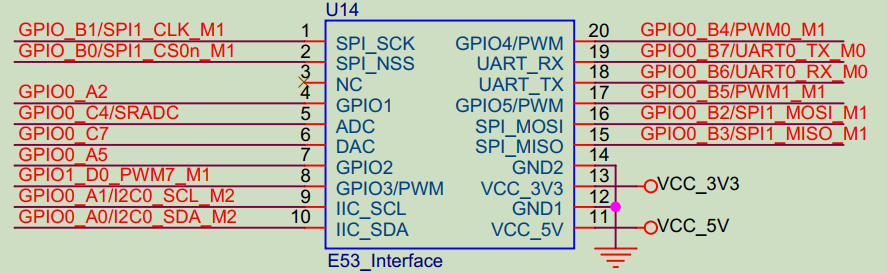
这是E53模块的原理图:
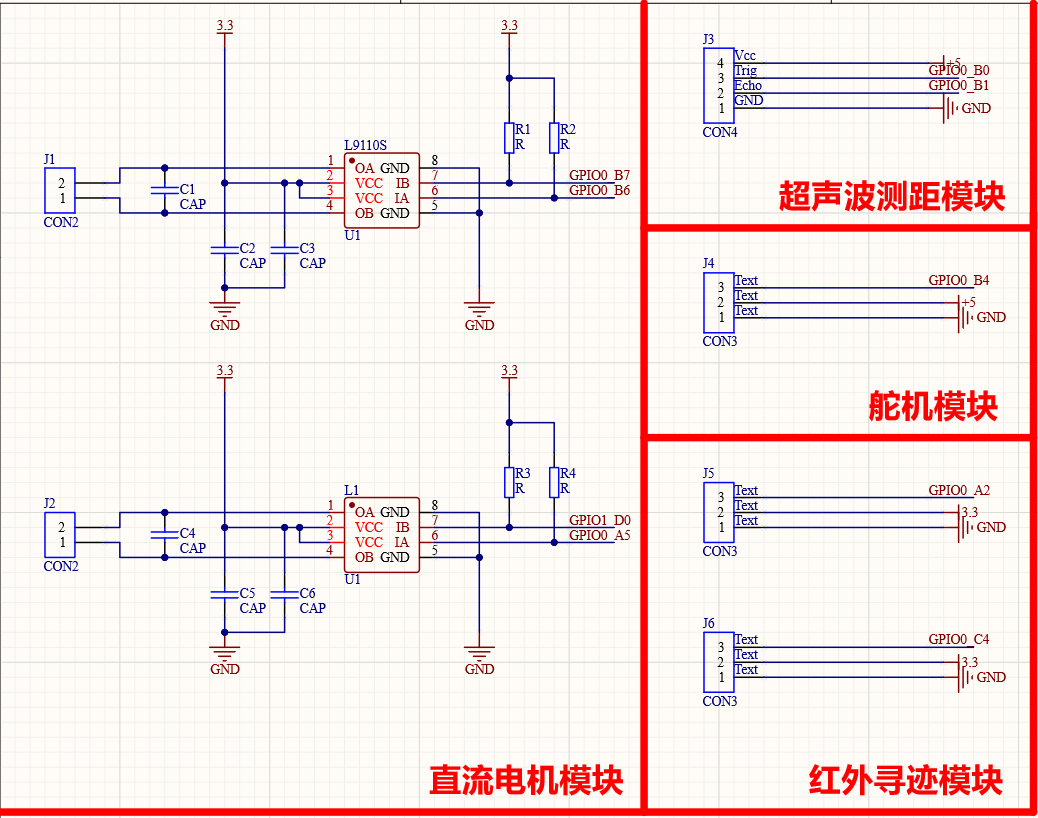
1. 直流电机模块
直流电机模块由E53模块上的L9110S驱动芯片进行驱动。L9110S驱动芯片所引出的引脚对应接口的GPIO0_B7、GPIO0_B6,另一块驱动芯片对应GPIO1_D0、GPIO0_A5。我们对相应的GPIO引脚进行初始化并设置为上拉模式。
//右直流电机 IA GPIO0_PB7PinctrlSet(GPIO0_PB7, MUX_FUNC0, PULL_UP, DRIVE_KEEP);LzGpioInit(GPIO0_PB7);//右直流电机 IB GPIO0_PB6PinctrlSet(GPIO0_PB6, MUX_FUNC0, PULL_UP, DRIVE_KEEP);LzGpioInit(GPIO0_PB6);//左直流电机 IB GPIO1_PD0PinctrlSet(GPIO1_PD0, MUX_FUNC0, PULL_UP, DRIVE_KEEP);LzGpioInit(GPIO1_PD0);//左直流电机 IA GPIO0_PA5PinctrlSet(GPIO0_PA5, MUX_FUNC0, PULL_UP, DRIVE_KEEP);LzGpioInit(GPIO0_PA5);
(左右移动查看全部内容)
通过阅读L9110S的芯片手册可以得到以下真值表:
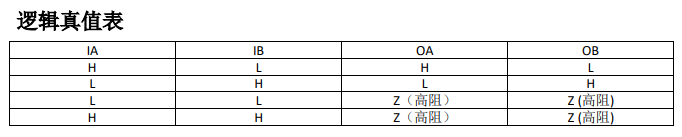
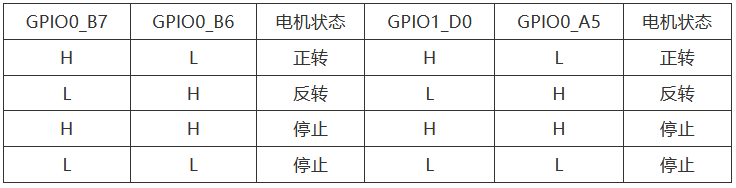
通过真值表,我们可以通过对IO口的输出来控制直流电机的正转、反转还有停止:
2. 超声波测距模块
超声波测距模块用来计算出模块到前方障碍物的距离。采用IO口TRIG触发测距,给最少10us的高电平信号。模块自动发送8个40khz的方波,自动检测是否有信号返回;有信号返回,通过IO口ECHO输出一个高电平,同时开定时器计时,当此口变为低电平时就可以读定时器的值,高电平持续的时间就是超声波从发射到返回的时间。
模块Trig对应引脚GPIO_B0,Echo对应引脚GPIO_B1,对这两个引脚进行初始化
// Echo 超声波传感器PinctrlSet(GPIO0_PB1, MUX_FUNC0, PULL_KEEP, DRIVE_KEEP);LzGpioInit(GPIO0_PB1);LzGpioSetDir(GPIO0_PB1, LZGPIO_DIR_IN);// Trig 超声波传感器PinctrlSet(GPIO0_PB0, MUX_FUNC0, PULL_KEEP, DRIVE_KEEP);LzGpioInit(GPIO0_PB0);LzGpioSetDir(GPIO0_PB0, LZGPIO_DIR_OUT);LzGpioSetVal(GPIO0_PB0, LZGPIO_LEVEL_LOW);
(左右移动查看全部内容)
触发信号:
//通过Trig发送触发信号LzGpioSetVal(GPIO0_PB0, LZGPIO_LEVEL_HIGH);HAL_DelayUs(20);LzGpioSetVal(GPIO0_PB0, LZGPIO_LEVEL_LOW);
(左右移动查看全部内容)
获取定时器计数器当前值:
while (1){LzGpioGetVal(GPIO_8, &value);//获取上升沿的定时器计数器当前值if (value == LZGPIO_LEVEL_HIGH && flag == 0){m_echo_info.time_rise = *m_ptimer5_current_value_low;m_echo_info.flag = EECHO_FLAG_CAPTURE_FALL;flag = 1;}//获取下降沿的定时器计数器当前值if (value == LZGPIO_LEVEL_LOW && flag == 1){m_echo_info.time_fall = *m_ptimer5_current_value_low;m_echo_info.flag = EECHO_FLAG_CAPTURE_SUCCESS;break;}}
(左右移动查看全部内容)
上升沿和下降沿的节拍数差计算距离。其中,系统时钟为40MHz,超声波速度为340米/秒,高电平时间宽度为超声波的往返之和,所以实际距离 = 节拍数差 / 40MHz / 340(米/秒) / 2(往返2次)。具体计算代码如下:
if (m_echo_info.flag == EECHO_FLAG_CAPTURE_SUCCESS){/* 如果是采集成功,则计算距离 */if (m_echo_info.time_rise <= m_echo_info.time_fall){time_diff = m_echo_info.time_fall - m_echo_info.time_rise;}else{time_diff = 0xFFFFFFFF - m_echo_info.time_rise + m_echo_info.time_fall + 1;}}float f_time = (float)time_diff;float f_freq = (float)ECHO_TIMER_FREQ;distance = f_time / f_freq * 170.0 * 100.0;
(左右移动查看全部内容)
3. 舵机模块
舵机模块用来控制超声波测距模块测量左右方向的距离,舵机引脚为GPIO0_B4,对GPIO0_B4进行初始化。
//舵机PinctrlSet(GPIO0_PB4, MUX_FUNC0, PULL_KEEP, DRIVE_KEEP);LzGpioInit(GPIO0_PB4);LzGpioSetDir(GPIO0_PB4, LZGPIO_DIR_OUT);
(左右移动查看全部内容)
通过模拟PWM波让舵机工作。具体代码如下:
void set_angle(unsigned int duty){LzGpioSetDir(GPIO0_PB4, LZGPIO_DIR_OUT);LzGpioSetVal(GPIO0_PB4, LZGPIO_LEVEL_HIGH);HAL_DelayUs(duty);LzGpioSetVal(GPIO0_PB4, LZGPIO_LEVEL_LOW);HAL_DelayUs(20000 - duty);}
(左右移动查看全部内容)
4. 红外寻迹模块
红外寻迹模块,在避障小车中的功能是防止小车意外掉落。红外寻迹模块与小凌派的GPIO0_A2、GPIO0_C4连接,对这两个引脚进行初始化。
//初始化PA2 红外传感器PinctrlSet(GPIO0_PA2, MUX_FUNC0, PULL_UP, DRIVE_KEEP);LzGpioInit(GPIO0_PA2);LzGpioSetDir(GPIO0_PA2, LZGPIO_DIR_IN);LzGpioSetVal(GPIO0_PA2, LZGPIO_LEVEL_HIGH);//初始化PC7 红外传感器PinctrlSet(GPIO0_PC4, MUX_FUNC0, PULL_UP, DRIVE_KEEP);LzGpioInit(GPIO0_PC4);LzGpioSetDir(GPIO0_PC4, LZGPIO_DIR_IN);LzGpioSetVal(GPIO0_PC4, LZGPIO_LEVEL_HIGH);
(左右移动查看全部内容)
3避障小车功能实现
通过小凌派开发板自带的按键启动小车的避障功能
void car_ Obstacle_avoidance(void){float m_distance = 0.0;regress_middle();/*获取前方物体的距离*/m_distance = GetDistance();car_where_to_go(m_distance);osDelay(20);}
(左右移动查看全部内容)
通过超声波测距模块测量前方距离来判断小车接下来要运动的方向。若距离大于等于20cm继续前进。若距离小于20cm,先停止再后退0.5s,再继续进行测距,再进行判断。通过两个红外寻迹传感器可以防止小车掉落,当红外传感器输出为高电平时,小车就会停止前进,并且重新寻找安全方向。
static void car_where_to_go(float distance){LzGpioValue io_status_left;LzGpioValue io_status_right;LzGpioGetVal(GPIO0_PA2, &io_status_left);LzGpioGetVal(GPIO0_PC4, &io_status_right);if (io_status_left == 0 || io_status_right == 0){if (io_status_left == 0 && io_status_right != 0){car_stop();LOS_Msleep(500);car_backward();LOS_Msleep(500);car_stop(); // meet wallcar_rightward();LOS_Msleep(800);car_stop(); // meet wall}else if (io_status_left != 0 && io_status_right == 0){car_stop();LOS_Msleep(500);car_backward();LOS_Msleep(500);car_stop(); // meet wallcar_leftward();LOS_Msleep(800);car_stop(); // meet wall}else if (io_status_left == 0 || io_status_right == 0){car_stop();car_backward();LOS_Msleep(500);car_stop(); // meet wall}}else if (distance < DISTANCE_BETWEEN_CAR_AND_OBSTACLE){car_stop();LOS_Msleep(500);car_backward();printf("This is backward ");LOS_Msleep(500);car_stop();unsigned int ret = engine_go_where();printf("ret is %d ", ret);if (ret == CAR_TURN_LEFT){car_left();LOS_Msleep(800);}else if (ret == CAR_TURN_RIGHT){car_right();LOS_Msleep(800);}car_stop();}else{car_forward();printf("This is forward ");}}
(左右移动查看全部内容)
4心得体会
通过使用OpenHarmony操作系统 + 小凌派-RK2206开发板来控制小车完成距离检测、前进、后退、左转、右转、判断算法等功能,实现了避障小车的基本功能。经过这一次实验测试,加强我个人对OpenHarmony的理解,实在是一次不错的学习体验,特此记录!
原文标题:基于搭载 OpenHarmony 避障小车心得体会
文章出处:【微信公众号:HarmonyOS官方合作社区】欢迎添加关注!文章转载请注明出处。
-
 jf_71481990
2023-09-29
0 回复 举报哥,有源码吗,求 收起回复
jf_71481990
2023-09-29
0 回复 举报哥,有源码吗,求 收起回复
- 相关推荐
- 热点推荐
- 开发板
- OpenHarmony
- RK2206
- 小凌派
-
基于小凌派RK2206开发板:OpenHarmony如何使用IoT接口控制UART外设2025-04-22 1512
-
基于小凌派RK2206开发板:OpenHarmony如何使用IoT接口控制GPIO中断2025-04-21 1428
-
基于小凌派RK2206开发板:OpenHarmony如何使用IoT接口控制GPIO外设2025-04-11 2501
-
基于小凌派RK2206开发板:OpenHarmony如何使用IoT接口控制ADC外设2025-04-10 1343
-
RK2206开发板搭载OpenHarmony操作系统简介2022-07-28 5299
-
小凌派-RK2206开发板:UART控制案例2022-06-14 2742
-
基于OpenHarmony+小凌派RK2206开发板制作的简易示波器2022-05-10 6257
-
【小凌派RK2206开发板试用体验】第2章 源码编译与固件下载2022-05-08 6671
-
基于小凌派RK2206开发板所制作的简易示波器2022-05-06 3402
-
轻量系统开发套件介绍:凌睿智捷 | 小凌派-RK2206 开发板套件2022-04-21 1546
-
基于搭载 OpenHarmony 避障小车心得体会2022-04-15 9178
-
凌智电子:小凌派-RK2206开发板顺利通过开放原子开源基金会兼容性测评2022-04-13 2034
全部0条评论

快来发表一下你的评论吧 !
