

 STM32利用互补通道产生PWM信号
STM32利用互补通道产生PWM信号
描述
定时器分为普通定时器和高级定时器。STM32和GD32都有TIMERX_CHX_ON或者TIMERX_CHXN,这种定时器是一种互补定时器,我们同样可以看到还存在与其名字很像的TIMERX_CHX,TIMERX_CHX,这些都是基本的定时器,按照基本的配置即可产生PWM信号,这里不做介绍 。
下面主要说一下利用互补通道产生PWM信号。
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
TIM_DeInit(TIM1);
TIM_InternalClockConfig(TIM1);
// GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM1 的PWM脉冲波形 GPIOB.13
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM1 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1 ; //选择定时器模式:TIM脉冲宽度调制模式2
// TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; //互补输出极性
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; //互补输出使能
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; //死区后输出状态
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Set; //死区后互补输出状态
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 OC2
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR2上的预装载寄存器
TIM_OC2Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 OC2
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR2上的预装载寄存器
TIM_OC3Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 OC2
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR2上的预装载寄存器
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; //自动输出使能
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; //刹车功能使能
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_Break_Disable; //刹车输入极性
TIM_BDTRInitStructure.TIM_DeadTime = 36; //死区时间设置
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF; //锁定设置
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; //空闲模式下输出选择
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; //运行模式下按输出选择
TIM_CtrlPWMOutputs(TIM1,ENABLE); //输出使能必须要有
TIM_Cmd(TIM1, ENABLE); //使能TIM3
}
接下来就是调用硬件驱动接口即可完成对PWM信号的产生与驱动。
如下:
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //延时函数初始化
TIM1_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
while(1)
{
delay_ms(10);
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>300)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare1(TIM1,led0pwmval);
}
}
l利用keil测试debug。
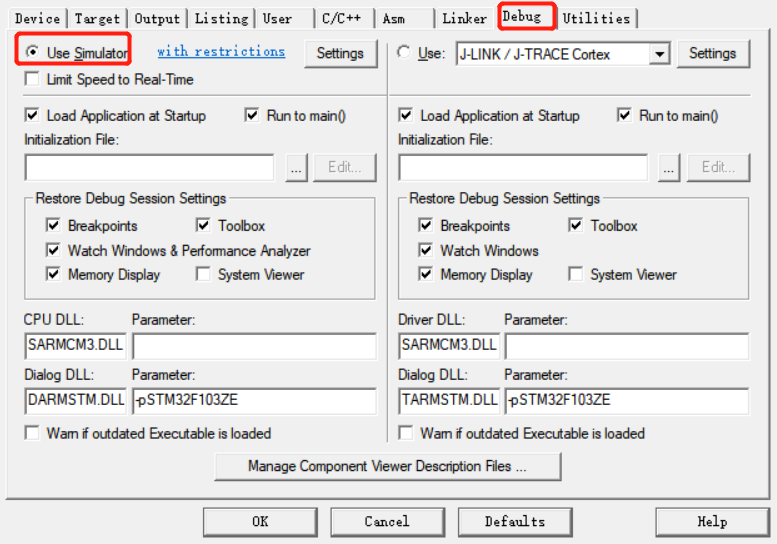 魔术棒配置软件模拟程序运行
魔术棒配置软件模拟程序运行
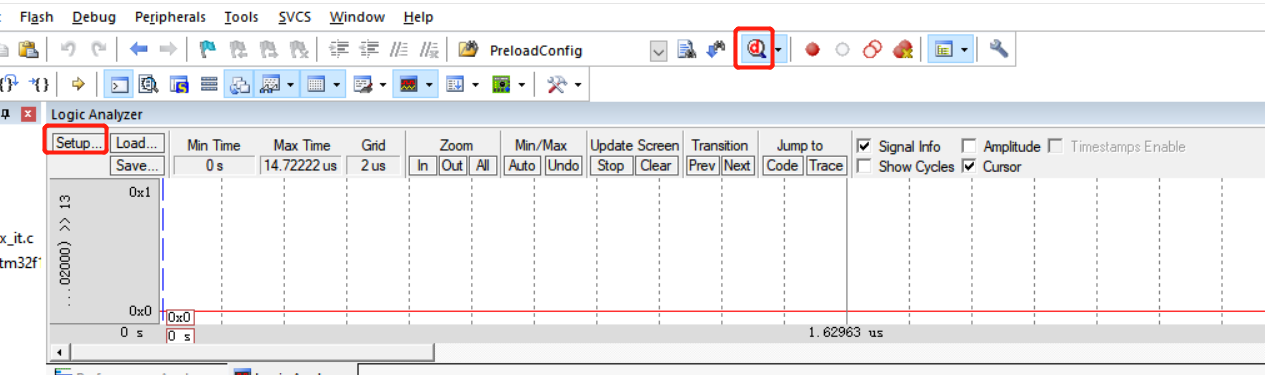 仿真步骤
仿真步骤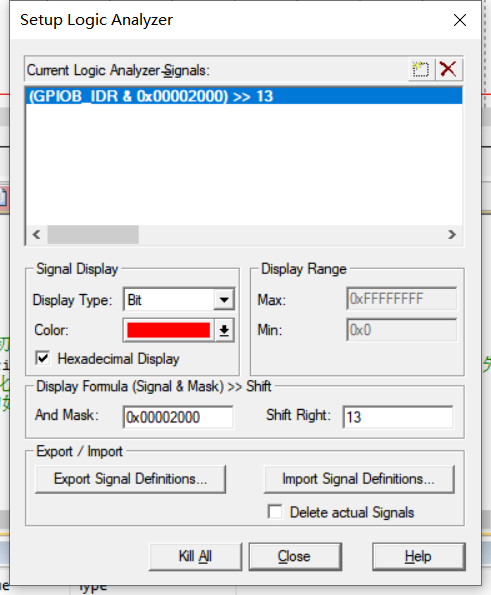 PB13引脚设置
PB13引脚设置
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于STM32芯片三路互补PWM输出的设计实现2023-07-21 14848
-
STM32CubeIDE下配置STM32F103输出带死区的互补PWM波2023-11-01 14110
-
采用STM32F030K6T6作互补PWM输出时,互补通道没有波形输出是为什么?2024-04-22 500
-
请问STM32怎么产生精确数量的互补PWM?2024-04-24 344
-
STM32F767的TIM1如何配置产生互补PWM?2024-05-06 372
-
STM32用TIM1产生互补PWM,怎么配置让它是高电平2019-01-21 5979
-
STM32F030K6T6作互补PWM输出时互补通道没有波形输出2019-04-18 3860
-
20216 可以产生对称互补PWM信号吗2020-05-21 1513
-
PWM互补输出的相关资料分享2021-12-21 1153
-
STM32F407高级定时器PWM两通道互补输出有何功能2022-01-20 1337
-
基于NiosII的多通道PWM信号测量产生器节点设计2009-11-30 617
-
STM32F411REF产生不同占空比的PWM方波信号2017-07-24 1861
-
[STM32]STM32F407系列教程之四,pwm产生原理2021-11-29 1632
-
STM32 TIM 多通道互补PWM波形输出配置快速入门2021-12-07 1713
-
STM32生成互补PWM波(输出前均为低电平)2021-12-31 1317
全部0条评论

快来发表一下你的评论吧 !
