

利用无人机和光泵磁力计进行航磁测量找矿
今日头条
描述
在哈萨克斯坦,这是首次使用无人机进行航空磁测量。本次研究采用铷泵浦磁力仪,旋翼型无人机作为载体平台。革命性的新型航空磁系统结合了无人机的可操作性和磁测设备的高灵敏度。该系统可以在极低的海拔、平坦的地形和困难的地形条件下进行详细的地形测量。由于这项新技术,可以将测量的细节水平和性能提高十倍,大大提高磁测量的精度,原则上已经可以利用阶梯高度测量进行磁场体积研究。
磁法勘探被认为是地球物理勘探中最有效的方法之一,并被广泛应用于地质勘探的各个阶段:寻找铁矿和其他矿物(包括碳氢化合物)、地质填图、构造研究等。高精度精密磁力测量在考古调查和工程测量中同样发挥着重要的作用。有系统地将磁力计用于勘探目的可以追溯到上个世纪初。1919年,在I.M. Gubkin院士、P.P. Lazarev工程师和a.c. Arkhangelsky工程师的领导下,开始了对库尔斯克磁异常的系统研究,随后在俄罗斯的库尔斯克、别尔哥罗德和奥廖尔地区发现了独特的磁铁矿铁质石英岩矿床。自上世纪40年代以来,哈萨克斯坦共和国的领土通过比例尺1:100万至1:20万的区域磁测进行了系统的研究,领土的大部分地区通过比例尺1:50000、1:25000和1:10000的详细测量进行了研究。 然而随着时间推移,地磁在地质勘探中的重要性不但没有减少,人们对它的兴趣在逐年增加。
在这些年的技术发展中,至少使用了四种类型的磁力仪。在第一阶段,光机平衡磁力计使用了50多年。随后,磁通门、质子和光泵磁力计被研制出来。目前,磁勘探主要采用核进动(质子)磁力计和光泵磁力计。针对各种测量条件,地面、井下、海上和空中作业用的专用磁力仪被大量生产。
由于性能高、精度高,航空磁学研究是磁学研究的主要部分。现代光泵磁力计具有高分辨率(灵敏度可达0.001 nT)和高性能(每秒可达100次测量)的特点,确保了磁场记录精度0.2-0.5 nT,使用标准空中平台时观测点之间的距离约为0.5 - 1m。采用差分数据平差的现代GPS导航系统可以获得亚米精度的观测点位置。而精确的标记又可大大降低航磁测量的总体误差,并可构建精度无与伦比的磁场图。航空磁测在研究足够大的区域时是最有效益的——最初的一千平方公里或更大的区域。当研究相对较小的区域(几十/ 100平方公里)时,由于设备和飞机租赁的成本占很大比例,调查的运行公里成本急剧增加,动员/遣散,有时从基地到调查地点的大量非生产性飞行,等等,因此,由于性能较低,该区域的研究使用了徒步磁力计,其性能水平勉强可接受,但精度大大低于航空磁力计。
利用快速发展的无人机航磁测量技术,可以较好地解决小区域磁勘探所面临的问题。重量不到一公斤的小型高精度高速磁测系统的开发,一系列无人机的广泛生产,导致了一种全新的航空磁测技术的发展,它结合了无人机的高机动性和磁测设备的高灵敏度。因此,磁测量的细节水平提高了许多倍。
目前,正在积极开展超轻型航空磁系统工业样品的制作和测试工作。在俄罗斯联邦,Geoscan LLC、伊尔库茨克国立技术研究大学俄罗斯科学院西伯利亚分院特罗菲穆克石油地质与地球物理研究所(Trofimuk Institute of Petroleum Geology and Geophysics)正在研究这个问题,加拿大和世界其他国家也在进行类似的研究。在哈萨克斯坦,SPC Geoken LLP于2017年9月至10月进行了使用无人机进行的航空磁测技术的首次测试。试验工作与Kazzinc LLP的地质勘探部门和俄罗斯公司Geoscan LLC合作进行,Geoscan LLC公司提供了一个基于无人机和光泵磁力计的航空磁测系统。
多旋翼型无人机- Geoscan 401四轴飞行器-被用作勘测的空中平台(图1)。

图1 无人机- geoscan401四轴飞行器
四轴飞行器配备有自动控制系统(自动驾驶仪)、惯性导航系统、双系统(GPS/GLONASS)导航接收机、工作负载控制单元和用于传输指令和遥测数据的数字通信通道。无人机由基于一台笔记本电脑和Geoscan Planner软件的地面控制站(GCS)控制。GCS能够准备飞行任务,监视和控制飞行和显示从UAV获得的遥测数据。起飞、根据飞行任务在测量航线上工作、降落均在自动模式下进行,操作员可及时更改飞行任务。无人机与地面站通过数字通信信道连接。所有来自无人机的数据-坐标,航向,滚转,俯仰,速度,电池剩余电量等-在GCS实时显示。
无人机由锂聚合物电池供电。四轴飞行器最大水平速度为50 km/h (14 m/s),航磁测量以36 km/h (10 m/s)的速度进行。最大负载重量为2kg。相对安全高度最小为25米,最大为500米。飞行时长(从起飞到降落)由无人机的电池容量决定,最长为40分钟。在这段时间内,可以计算出22公里的航磁路线(根据进近和转弯进行调整)。在一个工作日内,可以进行6-8次飞行,并进行120-160公里的勘测。磁场由由光泵的铷磁敏磁力计记录。磁力计使用20米长的卡普纶绳索固定在无人机上(图2)。

图2 悬挂杆处的量子铷磁力计,由无人机用卡普纶绳索牵引
磁场采样率为1000hz。单片GPS接收器与磁力计一起安装在吊杆上。定位数据记录速率10hz。GPS接收器天线固定在距磁力计传感器约1米的杆上。原始的磁力计和定位数据记录在可移动存储器上。飞行结束后,所有数据都会被复制到笔记本电脑上,以检查数据的完整性和质量。
将磁力计原始数据由二进制转换为文本后,对原始数据进行统计处理,并将磁场数据导入数据库进行进一步处理,采样率为0.1 s,对应于航磁路径上0.8-1 m的间距。磁力计和定位数据使用GPS时间对齐。
所有航空磁测量都有高质量地磁变化记录的支持。地磁变化测量在三个地面MVS进行。其中两个在固定位置,第三个站-移动的一个-位于无人机起飞/着陆点附近,并随着区域的计算移动。
为评估飞行方向对磁力计读数的影响而进行的测试表明,偏差修正不超过1.0 nT。
在使用无人驾驶飞机进行航空磁测之前,已从主管当局取得所有必要的授权,按照既定程序商定每天飞行高度超过50米。
测试工作结果
此项新技术在哈萨克斯坦东部和中部的Kazzinc LLP勘探地区进行了试验。测试的主要任务是在实践中查明该系统在进行航空磁测时在最低安全高度和最佳飞行速度下的能力,评估磁强测量误差,并检测需要更新和改进的技术特征。此外,还解决了纯工业性质的任务:在找金-石英矿和层状多金属矿时,为地质填图和预测估计建立详细的高精度磁测数据。全面开展航磁实验工作,测量路线1500多公里。建立了1:50 000和1:10000比例尺的探区磁场数字模型。对照测量,测量均方根误差为±0.25-0.35 nT。
航空磁测区位于哈萨克斯坦东部,位于哈萨克斯坦阿尔泰西南山脊的南坡上。根据构造分类方案,本区位于西卡尔宾斯克构造带的中部,根据成矿带资料,本区属于西卡尔宾斯克金矿带。航磁测量是金-石英型矿石综合找矿的一部分。航磁测区为复杂起伏地形(图3),海拔685 ~ 1360 m。山坡上长满了1-2米高的刺状灌木,行走时很难穿越。沿着河床——生长着一片树木高达10米的森林。航空磁测是在地表以上50米的磁力计传感器高度进行的。为了评价多高程航空磁测在体积地质填图方面的效率,除了在50米高度进行的主要调查外,还在离地面30和70米的磁力计高度测量了局部地区的磁场。要在给定高度飞行且地形跟随,必须有足够精确的数字地形模型(DTM)。将预制DTM加载到GCS中,用于设计航磁路径的垂直剖面。

图3 哈萨克斯坦东部地区,位于山脉的斜坡上,景观条件复杂
目前,Aster Global DEM和SRTM DEM模型是最容易获得的免费使用的数字地形数据。SRTM DEM数据与高分辨率无人机影像摄影测量处理得到的地形数字模型(S. Mikhailov, Kazzinc, 2016)对比分析表明,在山地条件下,SRTM数据与地表实际高度的差异在无灌木的浅坡地为±3-4米,在丘陵山地和有乔灌木植被的地区为±9-10米。
在初始阶段的研究中,SRTM数据用于飞行计划时,由于模型的重大错误,因此,低估真正的地形和森林覆盖,磁力仪的吊舱系统被树木切断了导致磁力计掉落。幸运的是,磁力仪没有损坏,也没有失去工作能力。随后的飞行使用高精度DTM (cell/pixel size为2 m,高度绝对误差±0.2 m),使用无人机拍摄的高分辨率图像的摄影测量处理数据构建。后来就没有这样的事故了。
图4为测量路径垂直剖面示例。
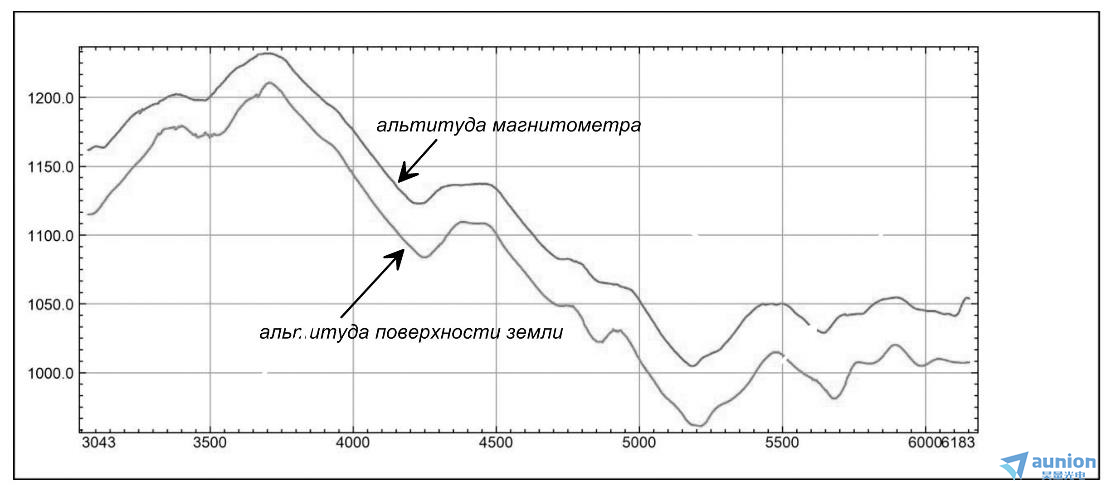
图4 航空磁测时地形跟随的磁力计高度与地球表面图
航磁测量在航线之间50米的距离进行。为了平整航磁测量数据,对与直线垂直铺设的一系列连接线路进行了测量,连接线路之间的距离为1 km。磁力计在测量路线上的平均速度为36 km/h (10 m/s)。磁场采样率为1000hz,坐标采样率为10hz。对磁力计原始数据进行统计处理后,将磁场记录到结果数据库中,时间增量为0.1 s,对应于航空地球物理路径上0.8-1 m的距离。
航磁测量结果为异常磁场彩色图像(图6a)和异常磁场垂直梯度计算结果(图6b)。场的垂直梯度降低了原场的低频分量,增强了局部分量,强调了场内部结构的要素。为了比较沿多条航磁路线的航磁测量和地面测量,利用G-859光泵磁力计进行了地面地磁测量(图7)。
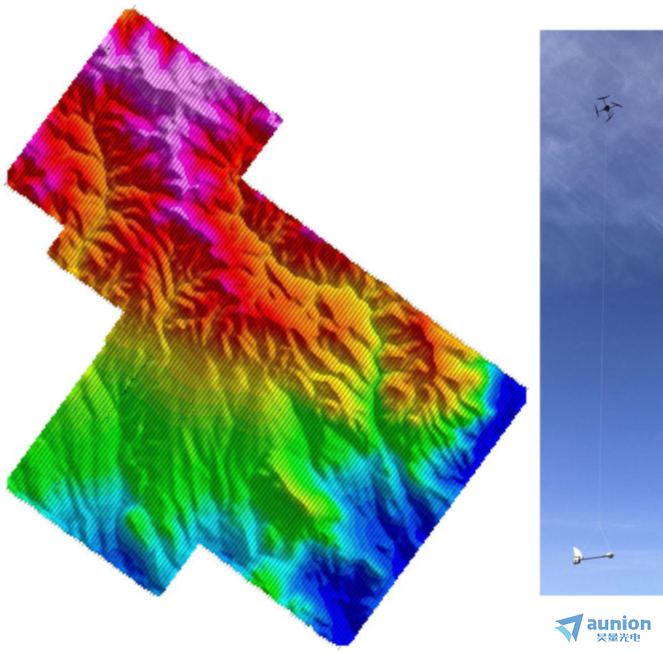
图5 哈萨克斯坦东部地表起伏和航磁测量路线地形高程685 - 1360 m
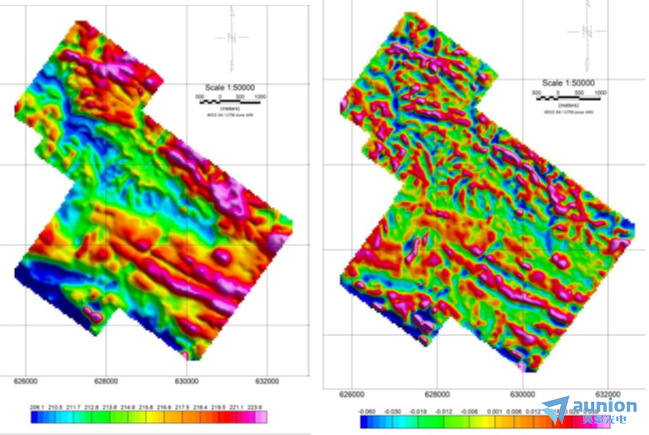
图6 异常磁场(上)和磁场垂直梯度(下)

图7 使用G-859磁力计进行徒步磁测
磁场为自动模式记录仪,时间增量为4 s,操作者沿导线的平均速度为1.8 km/h,徒步移动时相邻测点之间的距离为0.5 ~ 4 m,取决于灌木密度和坡角。陆地磁力计平均采样间隔为2米。在同一导线上进行的航空和陆地测量的磁场图见图8。
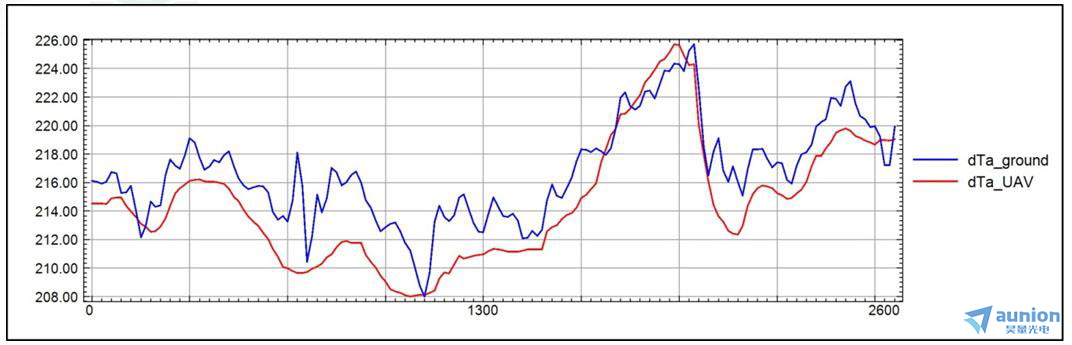
图8 陆、航磁测量磁场图对比
相对于无人机航磁测量数据而言,徒步运动时的磁场测量噪声水平明显较高。根据对照测量,陆地测量的均方根误差为±2.3 nT,在地磁仪高度50 m处的航空磁测量的误差为±0.25 nT。
哈萨克斯坦中部的试验工作区域位于哈萨克斯坦共和国卡拉干达地区的Zhailminskaya下褶皱区。利用无人机进行航磁测量,用于地质填图、隔离和追踪有希望的层状铅锌、铁锰矿带。该地区预测与上法门统有机质灰岩有关,被风成砂和古近系粘土覆盖。在上世纪70年代的找矿过程中,通过探井对方铅矿和闪锌矿嵌布细脉的石灰岩进行了相交,深度为150 ~ 160 m。
研究区域地势平坦,景观条件为草原、半荒漠(图9)。研究区域面积38平方公里,采用1:10000比例尺航磁测量。航磁线路总长度为465公里。地磁仪测量时高度为地表以上30米,线路间距为100米。根据控制测量,航磁测量的均方根误差为±0.35 nT。

图9 哈萨克斯坦中部地区自然景观:风成沙、大草原、半沙漠
上世纪80年代在该区域进行了规模为1:25 000的综合航空地球物理调查。该调查是在AN-2飞机上使用MMC-214光泵磁力计进行的,该磁力计具有模拟-数字磁场记录。飞行高度为25-75米,航线间距离为250米,采用“泊斯克”无线电测地系统进行定位。定位误差±13.7 m,磁场测量MSE±2.7 nT。
为了评估使用无人机进行的航磁测量的信息价值,将得到的地图与以前进行的航磁测量的数据进行比较(图10)。利用现代软件Geosoft Oasis Montaj对归档的数字AMS数据进行再处理和可视化。为了便于比较,将磁场值降低到2017年的调查水平,同时使用相同的色标进行可视化。
新测得的磁测数据与以前高精度航磁测量的结果基本一致。因此,对比分析明确表明,使用无人机获得的航磁数据具有更大的细节和空间分辨率。新的磁力测量几乎比1988年进行的那次更精确。局部磁场分量(图11)包含了以前无法获得的有关该地区构造和构造剖面细节的新信息。随后结合其他地质和地球物理资料对新的磁力测量材料进行深入分析,很可能会发现铅锌矿化的其他找矿标准,并采取更合理的方法来确定有希望的地带进行进一步研究。
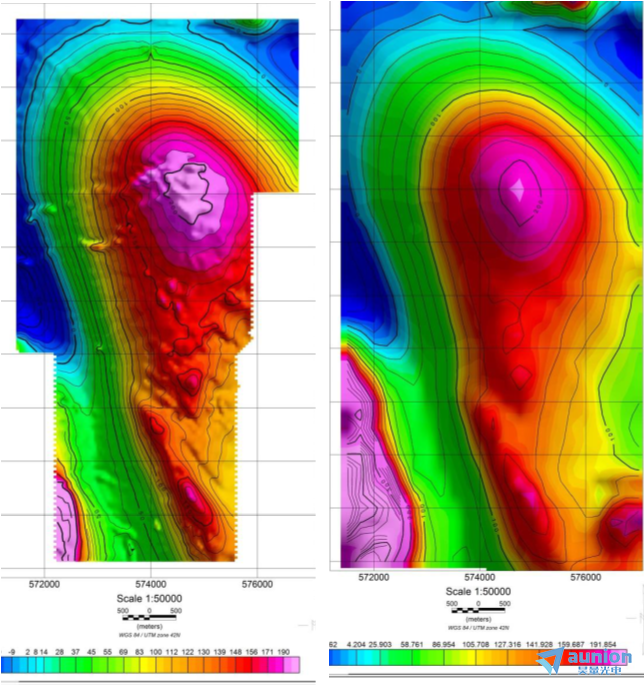
图10 2017年左侧磁场异常- 1:10000测量;对,1988年1:25000的调查
进行的测试工作可以得出以下结论:
1. 利用无人机和光泵磁力计进行航磁测量技术试验,取得了良好的结果。以无人机和光泵磁力计为基础,利用铷磁敏传感器构建的航磁系统,将无人机的机动性与测磁设备的高灵敏度结合起来。该系统可以在极低的海拔、平坦的地形和困难的地形条件下进行详细的地形测量。新技术的结果是,可以将测量的细节水平和性能提高10倍,从而显著提高磁测量的精度。
2. 随着该系统的引入,由于多次高程测量和垂直剖面处理,可以进行磁场的体积研究,这反过来又为磁测数据分析和解释提供了使用新方法的可能性,这将导致构建可靠度达到新水平的体积地磁模型。
3. 进一步改进和引进低空航空磁测技术,将有可能为详细地质填图(比例尺1:10 000 - 1:10:从而提高地质图的质量和可靠性,提高预测成矿分析和找矿生产力。
4. 当有人驾驶的飞机无利可图,并且徒步测量需要更多的劳动力或由于地形条件恶劣而不可能时,使用该技术的最大效果预计是在中型地区(几十平方公里,前数百平方公里)的勘探。未来几年,利用无人机进行的低空航磁勘测很可能会被大量使用,在某些情况下几乎完全取代陆地磁勘探,而磁测在地质勘探中的效率和实际重要性不不断增加。
关于生产商Geoscan:
Geoscan集团是俄罗斯无人机(UAV)制造商,摄影测量数据处理和三维数据可视化软件的开发商。公司旗下地球物理部门开发了基于无人机和光泵磁力计的航磁测量系统,目前全球已有超过50多个客户使用。上海昊量光电作为Geoscan在中国大陆地区独家代理商,为您提供专业的选型以及技术服务。对于Geoscan有兴趣或者任何问题,都欢迎通过电话、电子邮件或者微信与我们联系。
审核编辑:符乾江
-
[7.4.1]--7.4三轴磁力计李开鸿 2022-11-10
-
【云智易申请】智能无人机通信2015-08-07 2958
-
智能植保先锋,亿天航植保无人机2016-02-27 3439
-
想成为农业未来,关注亿天航植保无人机2016-04-08 3678
-
【ELF灵翼自拍无人机申请】灵翼航拍无人机测评2016-04-19 2915
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 11678
-
无人机系列之飞控系统2018-09-25 6624
-
【设计技巧】无人机系列之飞控算法2019-07-14 4822
-
多旋翼无人机飞控系统的设计资料分享2021-11-11 1294
-
有刷电机无人机飞行控制器2022-08-08 1737
-
【疯壳·无人机教程25】开源编队无人机-定高、定点、悬停2022-09-02 55730
-
在利用无人机航拍时需要注意什么2019-08-01 2829
-
浅析IMU中加速度计、陀螺仪、磁力计原理2023-03-02 6221
-
脑磁图(MEG)新型技术及功能特点-多通道光泵磁力计便携平台2024-06-06 2550
-
磁力计LIS2MDL开发(4)----MotionMC 执行磁力计校准2024-08-26 5121
全部0条评论

快来发表一下你的评论吧 !
