

深度剖析控制系统中的模拟信号与数字信号
描述
开始了解模拟和数字通信之间的区别,并阅读一些关于如何在控制系统中使用模拟、数字和离散信号的示例。
设备之间的通信是现代控制系统中最关键但也是最令人困惑的概念之一。很多混乱是由于多年不断发展的协议和技术——有些简单,有些复杂得多。
主要有两类通信方法,分别涉及模拟信号和数字信号。但即使在数字信号的范畴内,也有许多不同的策略来解释控制器如何共享过程数据。
在这篇入门文章中,我们将讨论数字和模拟通信的高级概念,并为控制工程师在工作中如何与这些概念交互提供背景信息。
了解模拟与数字信号
每个有经验的控制工程师都熟悉数字电压和模拟电压之间的区别。这两种对比电压策略在任何数字电子技术或工程课程的范围内都有解释。经过进一步的实践检验,在两个设备之间创建通信通道时会出现相同的概念。但是,在这种情况下,差异并不像教科书所呈现的那么简单。
设备之间的模拟通信是发送数据的常用方法,它比按钮或开关等简单的开关控制更复杂。模拟信号仍然很简单,但可以通过单线呈现大量数据。
图 1. 模拟信号示例。
数字通信更抽象。术语“数字”可以指单个离散信号,也可以指以太网、DeviceNet、Modbus或几乎所有其他串行数据流使用的二进制数据流。

图 2. 一个示例数字信号。
由于这种复杂性,数字通信类别将在离散和数字场景中进行讨论。
模拟通信
术语模拟是指具有两个以上不同可能电平的任何电压。大多数驱动数字控制器的微处理器更喜欢两态电压——通常简称为“开”和“关”——可能的最低和最高电压,具体取决于系统的电源。
但是,在计算机之外,这些电压可能在最小值到最大值范围内的任何位置。根据工业系统的不同,有一些通用标准。
对于微控制器,例如流行的 Arduino 和其他相关板,模数转换器 (ADC )可以读取 0 到 5 V 之间的电压。更常见的工业电压,如 24 V 系统,通常依赖于 0-10 V 电平。
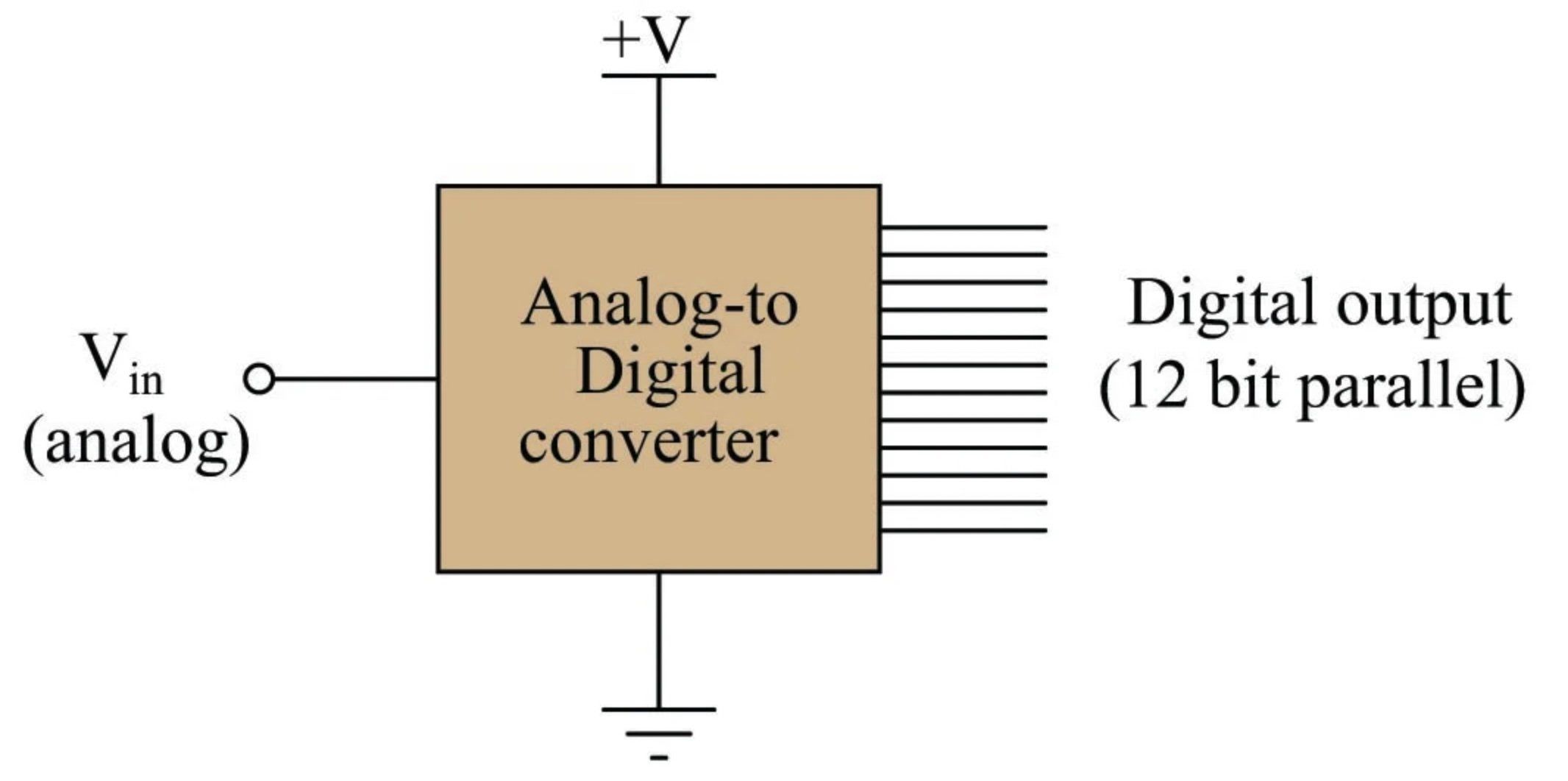
图 3. 模数转换器示例。
如果长线的电压降可能会在发送和接收之间出现不准确的读数,则信号可能会以恒流电源的形式呈现,其中 4-20 mA 是来自源的数据电平。
控制器具有从传感器读取单个模拟信号的能力是很常见的,但提供模拟输出则是另一回事。这可能很关键的一个场景是在没有以太网或其他网络适配器的情况下驱动 VFD 。必须比开/关更仔细地控制速度;因此,控制器必须向 VFD 提供模拟信号。同样,在大多数情况下,这可以是电压或电流。
模拟信号的一种不太常见但巧妙的用法是使用不同的电压电平来提供完全不同的数据——而不是简单地改变单一数据类型的值。例如,一个系统可能需要将六个不同传感器的值从一个设备发送到另一个设备。通过发送具有 2个 6(或 64)个不同电平的单个模拟信号,接收控制器可以立即识别这六个传感器的哪个组合通过单根电线打开和关闭。
离散通信
上一节中列出的电压电平,例如 0-5 V 或 0-24 V,在离散通信系统中同样相关。与其使用整个信号电平范围,不如期望它们以 0 伏或最大电压存在——两者之间没有任何关系。
在这些通信系统中,每个信号都是不同的线路。如果前面示例中的同一个 VFD 需要一个用于 RUN 和 JOG 的信号,那必须是两个单独的信号。
束中增加的电线数量可能会带来问题,因此这种离散通信方法很少用于传输大量数据。它的优势是在少量简单数据信号的情况下,或者当设备在物理上分开时,使网络电缆失效。这些单独的信号比在复杂网络中更容易排除故障。
与经常混淆的观点相反,交流电压绝对有可能用于离散控制系统。事实上,这很常见。电压可能是 120 vAC,如果传感器提供 0 V,它会关闭;但如果它提供 120 V,则信号开启。唯一的区别是控制设备的输入模块的额定电压必须至少为 120 vAC,否则会发生损坏。
实际上,电压不是 0 和全电源电压。每个器件都会在数据表中列出一个容差,该数据表提供了关于多低可以被视为“关闭”以及多高可以被视为“开启”的指导。如果显着的电压降迫使 24 V 信号降至 21 V 以下(例如),则控制器可能无法将其识别为开启或关闭,并且必须解决问题的根源才能正常运行。
数字通信
这最后一类不能在一篇文章的范围内彻底解释和定义。
当从一个设备直接连接到另一个设备或作为大型网络的一部分时,可能会发生数字通信。这些数字协议以一系列离散位的形式存在,这些位沿单个发送 (Tx) 或接收 (Rx) 线发送。这些位的速度,以及控制器的任何地址或数据流的实际内容和目的,完全取决于协议的定义。
从某种意义上说,数字通信可以被认为是摩尔斯电码,点划线代表高低两个电压电平。
-
数字信号和模拟信号的特点及应用2024-08-25 6844
-
数字信号转模拟信号是调制还是解调2024-06-03 9066
-
模拟信号与数字信号的区别2024-05-21 4564
-
模拟信号和数字信号的区别及其特点2023-11-22 8878
-
压力传感器模拟信号(频率)转数字信号的问题2023-08-24 1919
-
数字信号和模拟信号的区别2023-06-25 7785
-
数字信号与模拟信号及脉冲信号的区别2023-06-08 8737
-
模拟信号和数字信号的定义以及差异2020-01-09 15122
-
模拟信号和数字信号如何得到兼容2019-06-19 3837
-
模拟信号和数字信号的差异2019-06-13 5326
-
如何区别模拟信号与数字信号2018-10-15 54539
-
数字信号与模拟信号的区别2016-09-20 1369
-
模拟信号与数字信号2009-04-06 16551
全部0条评论

快来发表一下你的评论吧 !
