

合成孔径雷达背景简介
电子说
描述
合成孔径雷达背景简介
雷达是由二战中的军事需求发展起来的,最初用于跟踪恶劣天气及黑夜中的飞机和舰船。随着射频(RF)技术、天线以及数字技术的发展,雷达技术也得到了稳步的发展。
早期的雷达系统利用时间延迟测量雷达与目标(雷达反射体)之间的距离,通过天线指向探测目标方位,继而又利用多普勒频移检测目标速度。
1951 年,研究人员发现,通过对多普勒频移进行处理,能够改善波束垂直向上的分辨率。根据这一原理,就可以利用雷达得到二维地表图像。这种通过信号分析技术来构建一个等效长天线的思想称为合成孔径雷达(Synthetic Aperture Radar,简称SAR)。
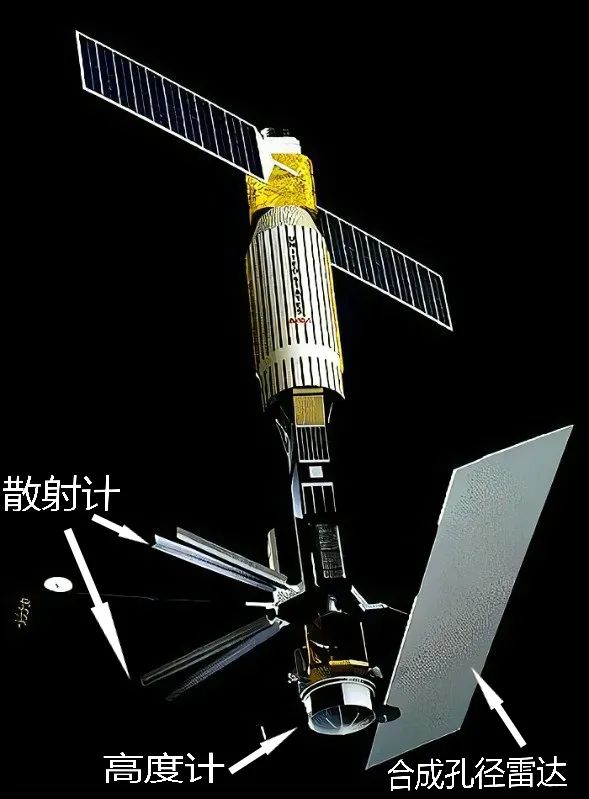
许多 SAR 的基础技术是在机载平台上发展起来的,直到第一颗星载 SAR 的发射才引起了遥感领域对这种新型传感器的关注。1978 年,NASA 的 SEASAT 卫星(如下图所示)向全世界展示了 SAR 获得高清晰度地表图像的能力。SEASAT 的发射促进了包括 SAR 数字处理器及 SAR 应用研究(如海浪波长、高度及方向测量等)在内的许多遥感领域技术的发展。
雷达系统接收到的 SAR 数据是散焦的,看上去很像随机噪声。与全息技术类似,回波数据的基本信息隐藏在相位中,所以需要一个对相位敏感的处理器来获得聚焦图像。
利用傅里叶光学原理,聚焦可以通过激光波束和透镜组来完成。将雷达回波数据记录在黑白胶片上,用一个激光束瞄准并照射胶片,利用透镜组将这些数据进行一次实时二维傅里叶变换,然后通过衍射光栅来聚焦数据,再经过另一组透镜进行傅里叶变换,就可以在胶片上获得最终的图像。
通过 SAR 光学处理器可以得到聚焦良好的图像,但需要对安放在光路上的高质量透镜组进行精确的调整。虽然除去胶片冲洗时间,数据处理是实时的,但仍然需要一个熟练的操作员来控制图像的质量,并且很难做到自动化处理。另外,最终图像的动态范围也受限于输出胶片。
SEASAT 之后,人们开始集中力量开发 SAR 数字处理器。回波数据经过数字化后,记录在胶带或磁盘上。20 世纪 70 年代后期,256KB 内存对于计算机来说已经相当大了,当时的磁盘容量和运算速度是非常低的。尽管如此,在 1978 年还是建立了一台 SAR 数字处理器来处理 SEASAT 数据,该处理器处理一幅 40kmx40km 大小的 25m 分辨率图像需要 40h。同样的数据用今天的桌面工作站处理只需要几十秒。
开发 SAR 数字处理算法需要将光学处理方法进行完整的移植。其中,字节长度、缩放比例、转角、插值以及快速卷积等都是需要考虑的细节。经过一系列原型化开发,1978 年,著名的精确数据处理算法:距离多普勒算法(range Doppler algorithm,简称RDA),人们很快就认识到 SAR 数字处理的优势和潜力,数字化方法也旋即成为主流。
1978 年以后,RDA 经过了多次改进,其他数字处理算法也不断涌现,其中有些是针对特殊应用的。过去30年里绝大部分雷达系统方面的革新都是由数字技术在雷达系统设计(尤其是数据处理)中的应用带来的。随着算法处理速度和雷达系统的不断改进,每年都有功能更强大的遥感雷达被设计出来。
SAR 基础
在遥感中,SAR 借助机载或星载平台获得地表图像。这一过程是通过雷达波束沿着与传感器运动矢量近乎垂直的方向发射相位调制(phase—encoded)脉冲,接收并记录经地表反射后的回波来完成的。
为形成一幅图像,需要在两个互相正交的轴向上进行强度测量。对于 SAR 来说,其中一个轴向(图像 x 轴)平行于雷达波束指向,在这个方向上,回波延时正比于雷达与散射体之间的距离。通过测量回波延时,雷达就能沿图像 x 轴将回波置于正确位置上。但实际上,天线波束与地面之间并不是平行的,波束指向与雷达运动方向之间也不是严格垂直的,由此造成的几何畸变需要在处理过程中加以校正。
图像的第二个轴向(图像 y 轴)由传感器的航向确定。当雷达在地表上方沿直线飞行时,雷达波束以近似相等的速度扫过地面。雷达发射电磁脉冲串并接收回波脉冲,这些回波经过处理后,就能依据当前的传感器位置而出现在图像 y 轴上,即产生了具有正确几何坐标的图像。类似于旋转雷达波束的方位向, y 轴方向又称为方位向(沿航迹向)。不同的是,对于 SAR 来说,方位向是通过雷达的线性移动来获得的,而不是像静止雷达那样通过波束旋转来获得的。
SAR 的不同工作模式
合成孔径雷达可以按许多不同方式进行工作:
条带合成孔径雷达(Stripmap SAR)。在这种模式下,随着雷达平台的移动,天线的指向保持不变。天线基本上匀速扫过地面,得到的图像也是不间断的。该模式对于地面的一个条带进行成像,条带的长度仅取决于雷达移动的距离,方位向的分辨率由天线的长度决定。
扫描合成孔径雷达(ScanSAR)。这种模式与条带模式的不同之处在于,在一个合成孔径时间内,天线会沿着距离向进行多次扫描。通过这种方式,牺牲了方位向分辨率(或者方位向视数)而获得了宽的测绘带宽。扫描模式能够获得的最佳方位分辨率等于条带模式下的方位向分辨率与扫描条带数的乘积。
聚束合成孔径雷达(Spotlight SAR)。通过扩大感兴趣区域(如地面上的有限圆域)的天线照射波束角宽,可以提高条带模式的分辨率。这一点可以通过控制天线波束指向,使其随着雷达飞过照射区而逐渐向后调整来实现。波束指向的控制可以在短时间内模拟出一个较宽的天线波束(也就是说一个短天线),但是波束指向不可能永远向后,最终还是要调回到前向,这就意味着地面覆盖区域是不连续的,即一次只能对地面的一个有限圆域进行成像。
逆合成孔径雷达(Inverse SAR,简称 ISAR)。到目前为止,我们考虑的都是目标静止而雷达移动的情况,然而在目标移动而雷达静止的情况下,SAR 同样可以工作。这种相反的工作模式称为“逆合成孔径雷达”。逆 SAR 的一个例子就是用地基雷达跟踪卫星航迹。这个概念可以推广到雷达和目标都运动的情况,例如用机载或星载合成孔径雷达对波涛汹涌的海面上的舰船进行成像。
双站合成孔径雷达(Bistatic SAR)。在这种工作模式下,接收机和发射机分置于不同的位置。对于遥感 SAR 来说,接收机和发射机通常很接近,可以近似成单基模式。
干涉合成孔径雷达(InSAR)。在这种工作模式下,可以通过复数图像的后处理来提取地形高度和移位。将两幅在同一空间位置(差分干涉 SAR)或间隔很小的两个位置(地形高度干涉 SAR)获得的复数图像进行共轭相乘,就能得到一幅具有等高度线或等位移线的干涉图。
SAR 分辨率
信号处理器在 SAR 分辨率中起着至关重要的作用,因为实际使用中发射脉冲的宽度很宽,必须经过脉冲压缩技术才能在距离向得到良好的分辨率。经脉冲压缩后,斜距分辨率等于光速除以二倍的距离处理带宽。
实际上,脉冲压缩技术在许多雷达系统中都有应用,而不仅限于 SAR,但是信号处理器的另一个作用却是 SAR 独有的,也是 SAR 区别于其他雷达的主要特征。一般雷达的方位向分辨率等于波束角宽与雷达到目标之间的斜距的乘积,即使对于窄波束雷达,几千米的斜距增量也会导致非常明显的方位向分辨率恶化。
然而我们注意到,处于雷达波束不同位置的散射体的回波具有不同的多普勒频移,如果利用这一点来区分不同的方位单元,就可以得到良好的方位向分辨率。这就涉及了“合成孔径”的概念,并由此给出“SAR”这一名称的缘由。利用多普勒频移,可以合成几千米的孔径,分辨率也得到相应的提高。
经过处理,最终的方位向分辨率等于天线尺寸的二分之一,而与距离无关。因此,为了得到更好的方位向分辨率,天线尺寸越小越好。一般的天线和透镜,都是尺寸越大分辨率越高,SAR 的这个特殊性质使得它与普通天线或透镜的工作原理正好相反。但是,如果天线尺寸过短或作用距离过远,图像的信噪比就会低于可接受范围。
信噪比
SAR 系统的另一个重要参数是图像信噪比(signal-to-noise,简称SNR)。SAR 信号的 SNR 可以由以下“雷达方程”导出。雷达方程表明,雷达接收功率是发射功率、雷达与目标之间的距离以及许多雷达系统和散射体变量的函数。
为建立图像质量与雷达发射功率之间的定量关系,一般将雷达方程表示成图像 SNR 的形式,如果图像包含分布目标(一般指杂波),则 SNR 为
式中, 为雷达平均发射功率, 为天线增益, 为雷达信号波长, 为地面目标的归一化后向散射系数, 为光速, 是雷达与反射体之间的距离, 为玻尔兹曼常数, 为接收机温度, 是发射信号带宽, 是接收机噪声, 为系统损耗, 为平台速度, 为波束入射角。
平均发射功率:
其中, 峰值发射功率, 雷达 , 发射脉冲持续时间。
天线增益是俯仰角和方位角的函数。计算俯仰向的增益时需要将雷达与目标的距离考虑在内;方位向的增益则是合成孔径角度范围内天线方向图的加权平均。 是标称工作温度下理想接收机的热噪声, 是实际接收机相对于理想接收机的附加噪声, 是信号在传输路径中的损耗。
当对孤立点目标成像时,由于点目标的尺寸近似于或小于雷达分辨率,因此它的大部分能量集中在图像的一个点上,点目标 SNR 为
其中, 为目标的雷达截面积, 为斜距分辨率, 为方位向分辨率。
这里使用的是目标的实际(没有归一化)雷达截面积, 和 是数据处理后的分辨率。利用这些公式,可以计算出点目标信杂比或点目标与杂波及噪声之和的比值。
SAR 的 SNR 与一般雷达 SNR 的主要区别在于对距离 的依赖关系不同。根据熟知的平方反比律(即能量均匀分布于整个半径为 的球面),由于雷达能量在发射和接收的传播中都经过了 的衰减,一般雷达 SNR 正比于 。
相比而言, SAR 处理器在方位向将回波能量按正比于斜距 的长度进行积分,因此消掉了分母中的一个表征能量传播关系的 ,导致SAR 的 SNR 正比于 。对 SAR 的 SNR 公式的理解并不能帮助我们更好地成像,但是 法则将会用于图像的辐射校正。
距离徙动
合成孔径处理是针对大量回波脉冲进行的。由于在合成孔径内传感器的移动,雷达与目标的距离随时间变化,这个变化所引发的回波数据的多普勒频移构成了合成孔径处理的基础。然而这种距离变化同时也导致了距离徙动(range cell migration,简称RCM)现象,使数据处理变得更复杂了。
雷达接收到回波以后,就对数据进行采样和存储。数据处理是一个二维过程,但一般分成距离向和方位向两个互相独立的一维处理过程。当回波能量在一个合成孔径时间内沿距离向没有明显的变化时,这种分离是非常简单的。这里的“明显”依赖于距离向的采样密度。
如果回波能量分布沿距离向的变化(或称距离徙动)超过了一个距离采样(或距离单元),就认为这种变化是“明显”的,在成像处理时必须加以考虑。通常处理过程中的RCM 校正是单独进行的,称为距离徙动校正(range cell migration correction,简称RCMC)。
- The End -
审核编辑 :李倩
-
合成孔径雷达(SAR)系统设计2023-12-18 5640
-
合成孔径雷达原理知识总结2023-10-23 4210
-
基于俯仰信息的车载合成孔径雷达成像方法2021-07-05 1087
-
基于测地线活动轮廓模型的合成孔径雷达图像分割2021-07-02 950
-
怎么实现合成孔径雷达卫星电磁兼容设计?2021-05-26 1565
-
合成孔径雷达的工作原理是什么?2020-04-08 5292
-
合成孔径雷达的工作原理_合成孔径雷达的特点作用2020-01-20 36183
-
载合成孔径雷达系统的接口实现与设计2019-04-25 3800
-
合成孔径雷达的研究热点解析2018-05-04 2880
-
超宽带合成孔径雷达树干杂波的统计特性分析2017-02-07 1210
-
超宽带合成孔径雷达方程研究2016-12-28 1113
-
合成孔径雷达图像处理电子书2011-07-28 2089
-
合成孔径雷达卫星2010-08-31 1074
-
合成孔径雷达转发式干扰分析2010-02-09 1026
全部0条评论

快来发表一下你的评论吧 !
