

硅基毫米波雷达收发机芯片设计技术
描述
前言
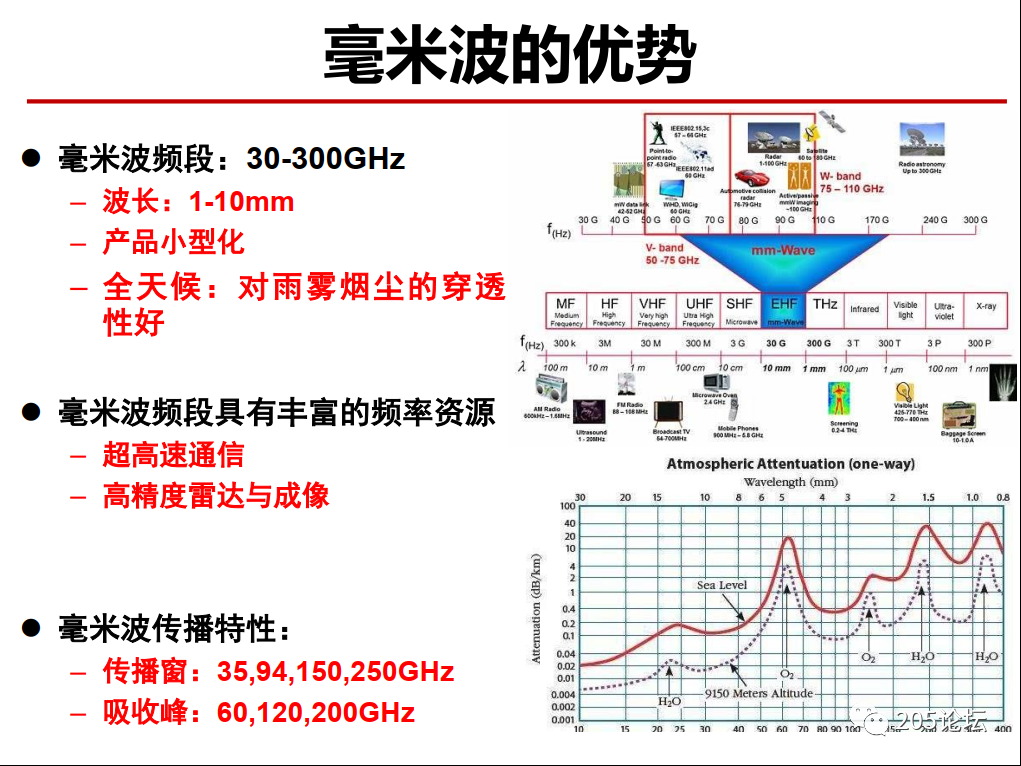
毫米波为真空波长从0.1~1.0 cm的电磁波,其对应的频率范围从30~300 GHz。
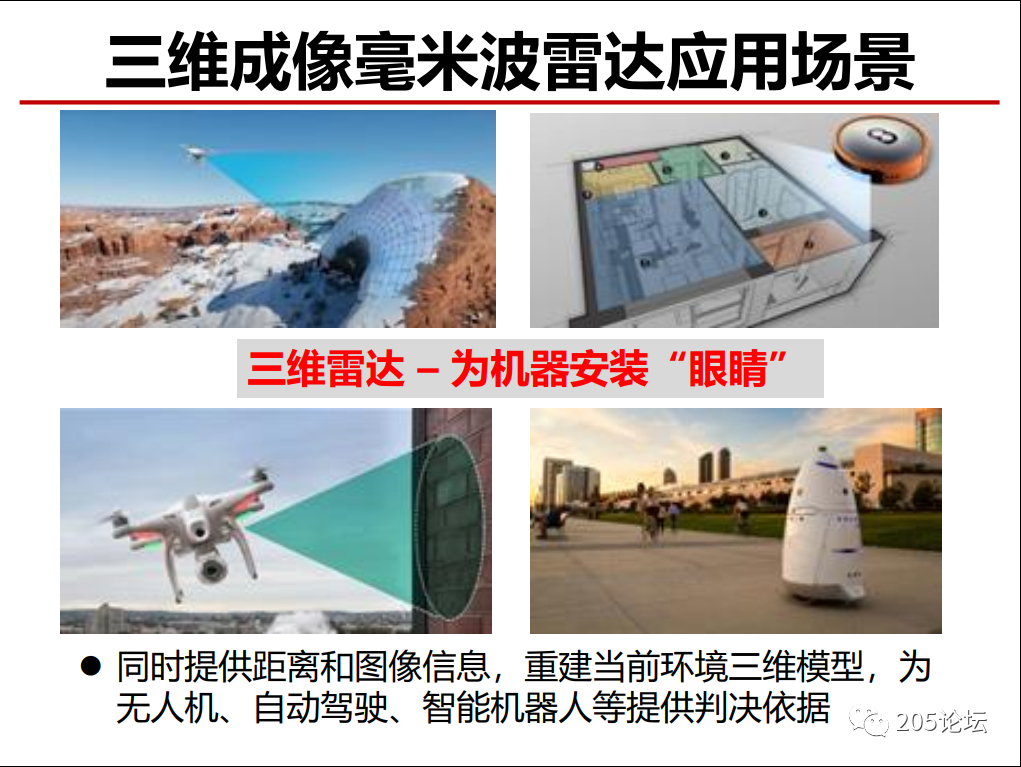
毫米波独特的频率范围使其在雷达检测中拥有独特的优势。与红外、可见光等频段相比,毫米波具备更好的穿透性,可轻易穿透雪、烟、尘等等,具备极端环境下的全天候工作能力。而相比于低频射频频段,毫米波波长更短,可以获得更好的分辨率,其所需的天线尺寸也更小,有利于小型化。毫米波雷达在车载雷达、智能机器人、生物体征识别、手势识别等方面都有不可替代的优势。
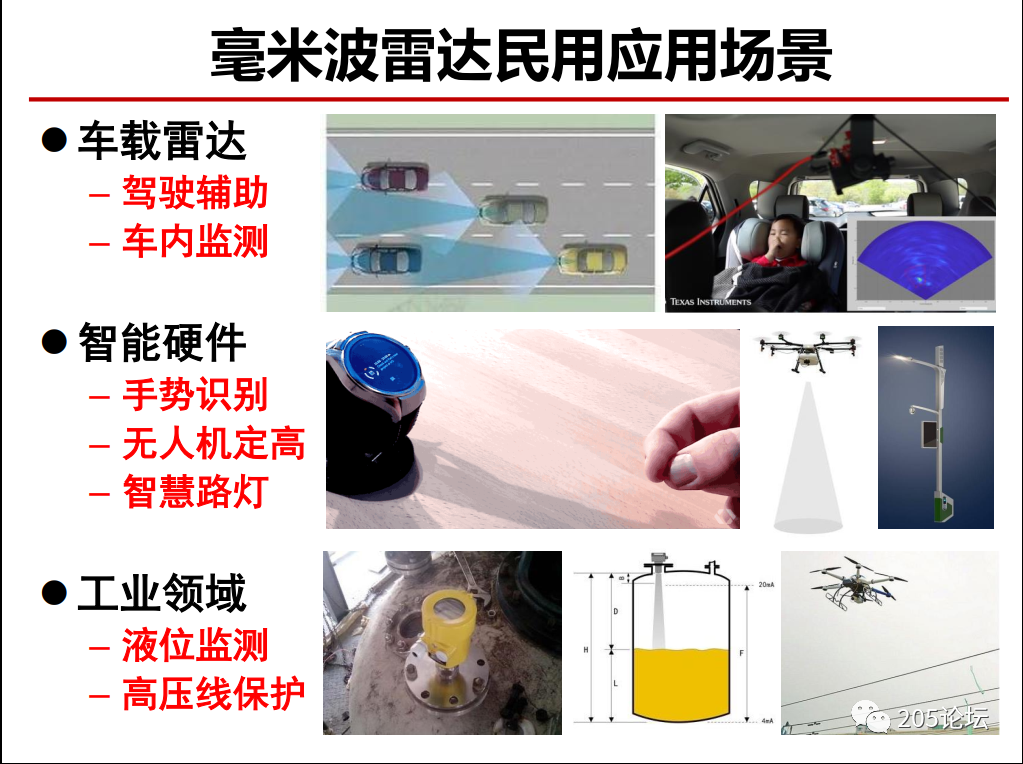
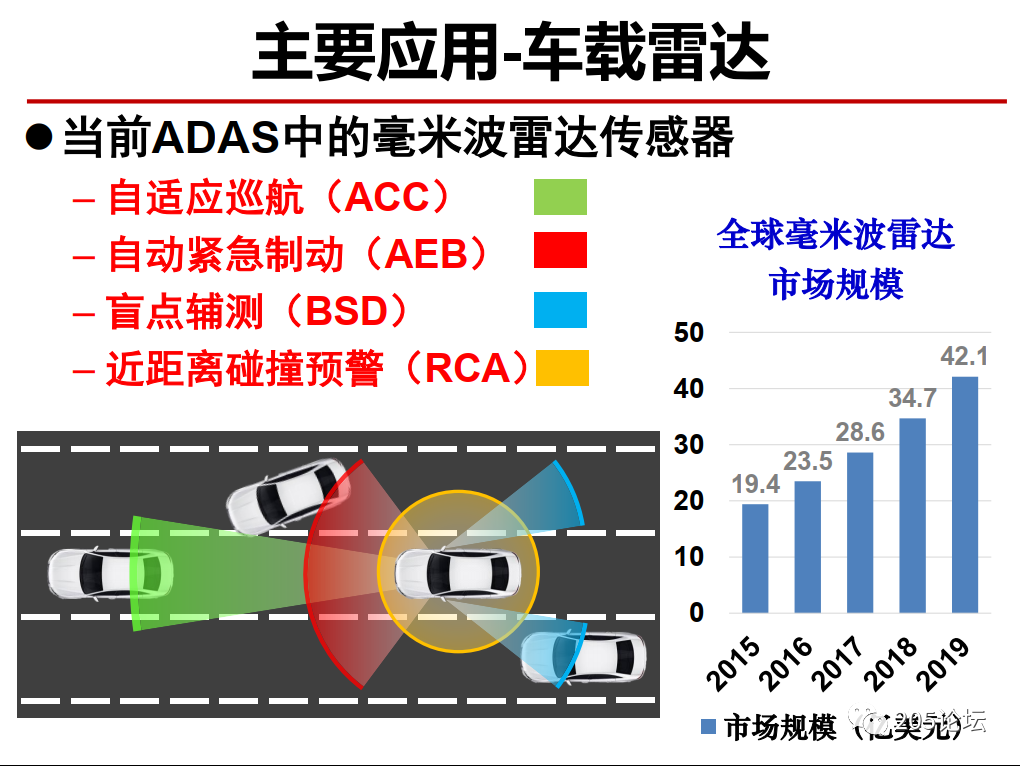
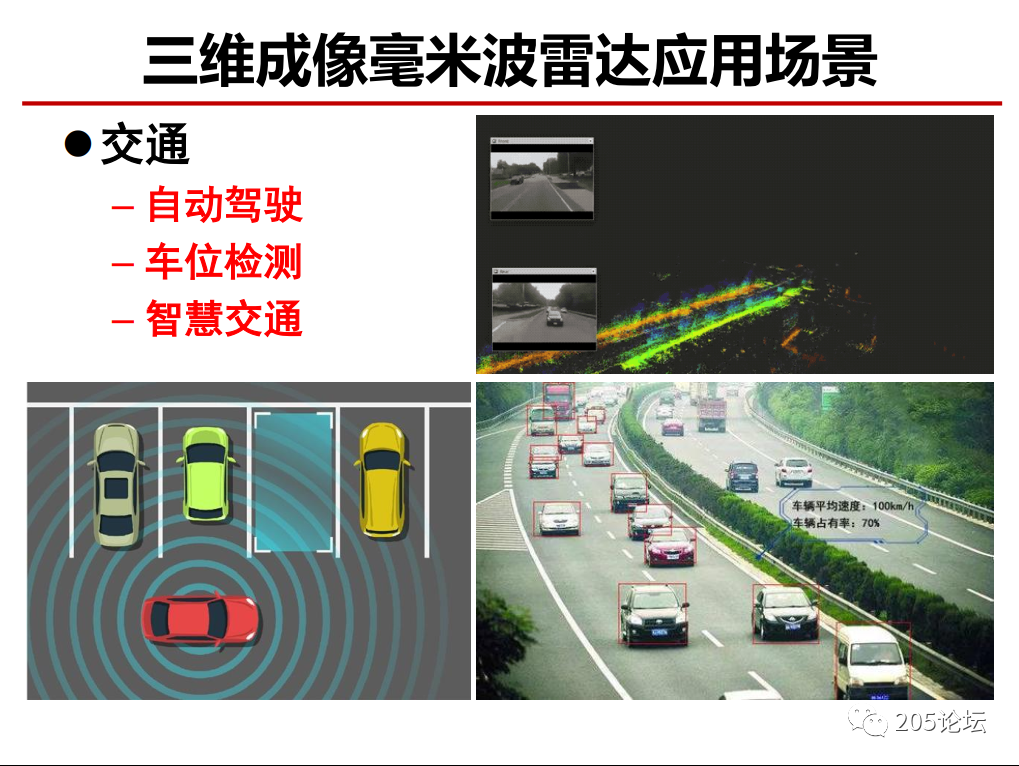
在车载雷达方面,现今的汽车对安全性和智能性要求越来越高,一辆高档车里集成了各种电子辅助系统,如泊车辅助、自主巡航、盲点检测、换道辅助、防撞预警、自主刹车等等。为了实现这些功能,车身需要安装大量的传感器,感知车身四周360º的环境。而且对传感器的工作范围、精度均有较高要求。现今的主流解决方案多采用24 GHz的雷达、图像传感器和若干个超声波传感器。这种方案成本高,精度和测距范围有限,典型的最小检测距离为20 cm,对于5 m外的目标距离分辨率为40 cm。一种更有潜力的方案是采用多个79 GHz的毫米波雷达替换掉超声波传感器和24 GHz雷达。79 GHz的毫米波雷达可以实现10 cm的最小检测距离和小于5 cm的距离分辨率,相比于前一种方案有很大提高。
而且,毫米波雷达不需要对车身开孔,这对于汽车外观设计也更为有利。学术界、工艺界对毫米波车载雷达开展了大量的研究。手势识别是另一种毫米波雷达潜在的应用场景。如今主流的智能设备的人机交互方式是触屏,包括点、划、长按等等,在这种交互下,人手必须与设备直接接触。毫米波雷达手势识别通过无线信号检测空中手势,人手不需要与接触屏幕,从而提供了新的交互维度。毫米波雷达手势识别的代表之一是美国谷歌公司开发的Soli芯片。该芯片发射毫米波雷达信号,捕捉手势的反射回波,将回波转换为包含距离和速度的时序信息,之后通过机器学习算法进行特征提取,识别,定位和追踪。得益于毫米波雷达的高距离分辨率,该芯片可以准确地识别按钮、转转盘和滑动滑杆等手势操作。相比于基于光学的手势识别,毫米波雷达手势识别功耗低,且不受环境影响,可靠性更高。
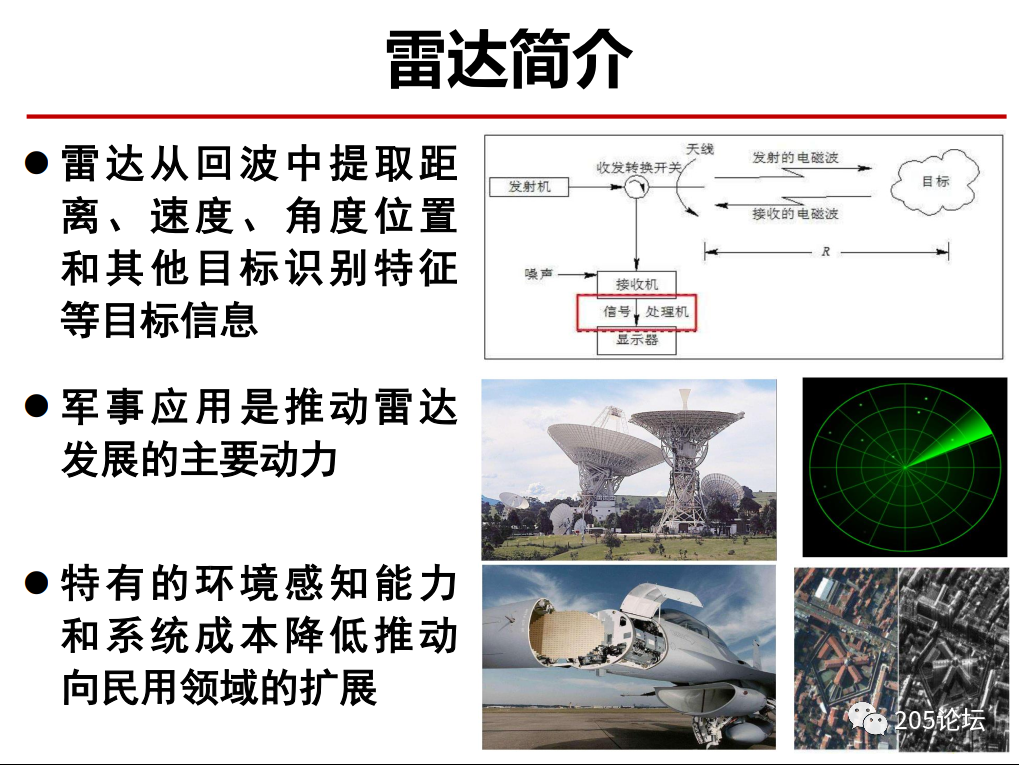
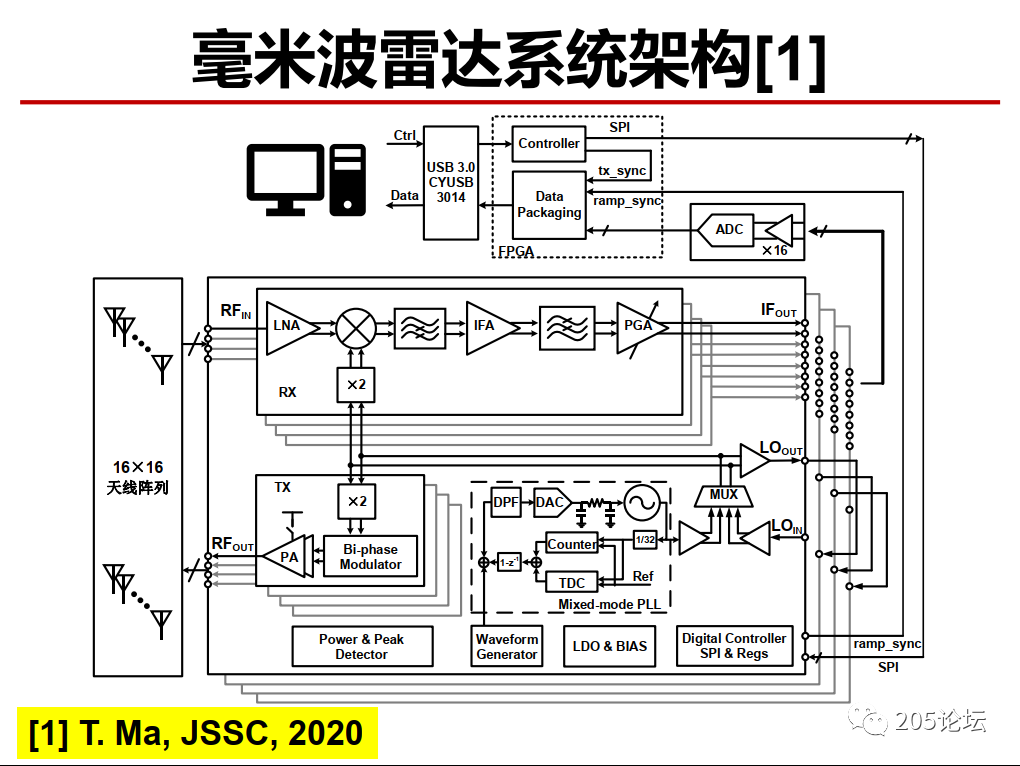
毫米波雷达系统主要包括天线、毫米波收发前端、数字信号处理和雷达控制电路。
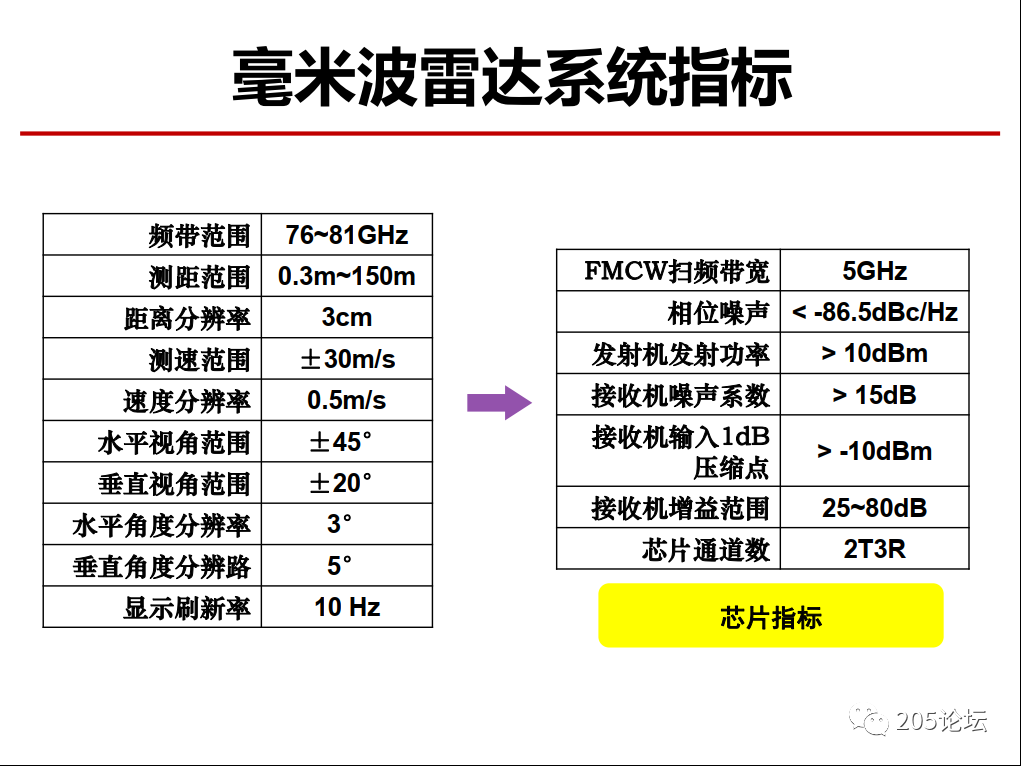
天线发射和接收电磁波信号,收发前端对信号进行放大、滤波、混频等操作,同时完成数模模数转换。对于毫米波雷达而言,天线和毫米波收发前端工作在毫米波频段,是毫米波雷达系统的核心组件。其中,毫米波收发前端的发展趋势为高性能(高输出功率、高灵敏度、低功耗等)、大规模(相控阵、 MIMO阵列)和全集成。毫米波雷达系统的关键性能指标,如检测范围、距离分辨率等,主要由天线和毫米波收发前端的性能所决定,例如天线的增益,收发前端的发射功率、接收灵敏度等。根据应用的不同,毫米波雷达选择的工作频段往往也不相同。频段的选择主要的考虑因素有:频谱规范、毫米波传播特性、所需分辨率、成本(芯片制造、封装等成本)等等。
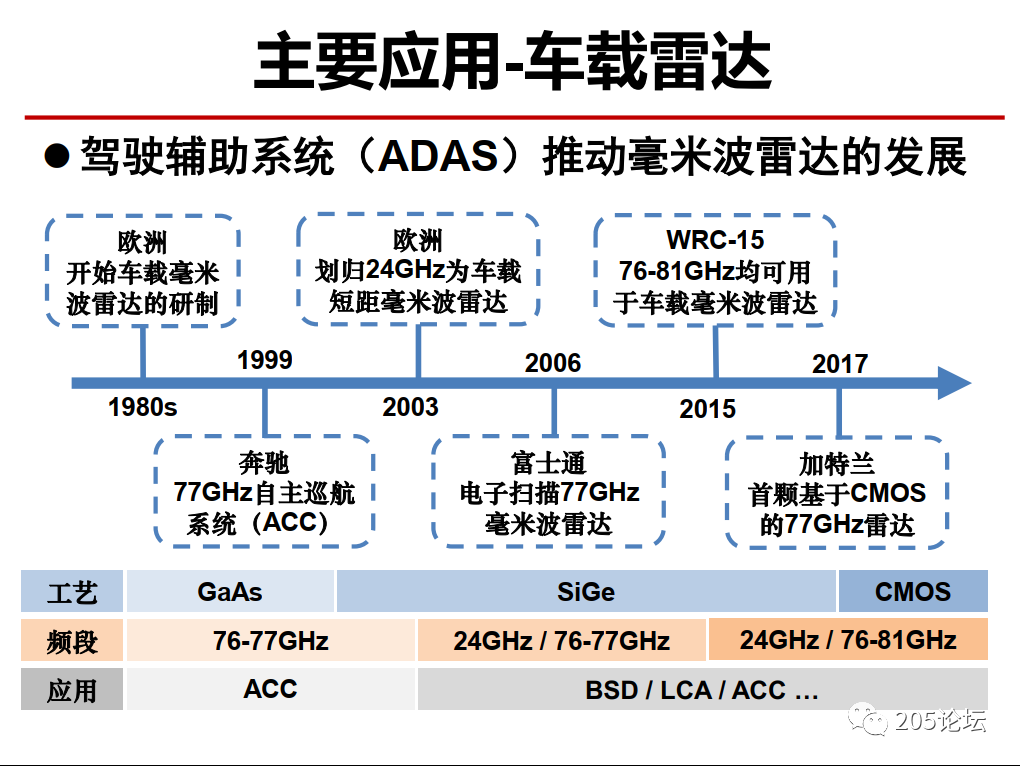
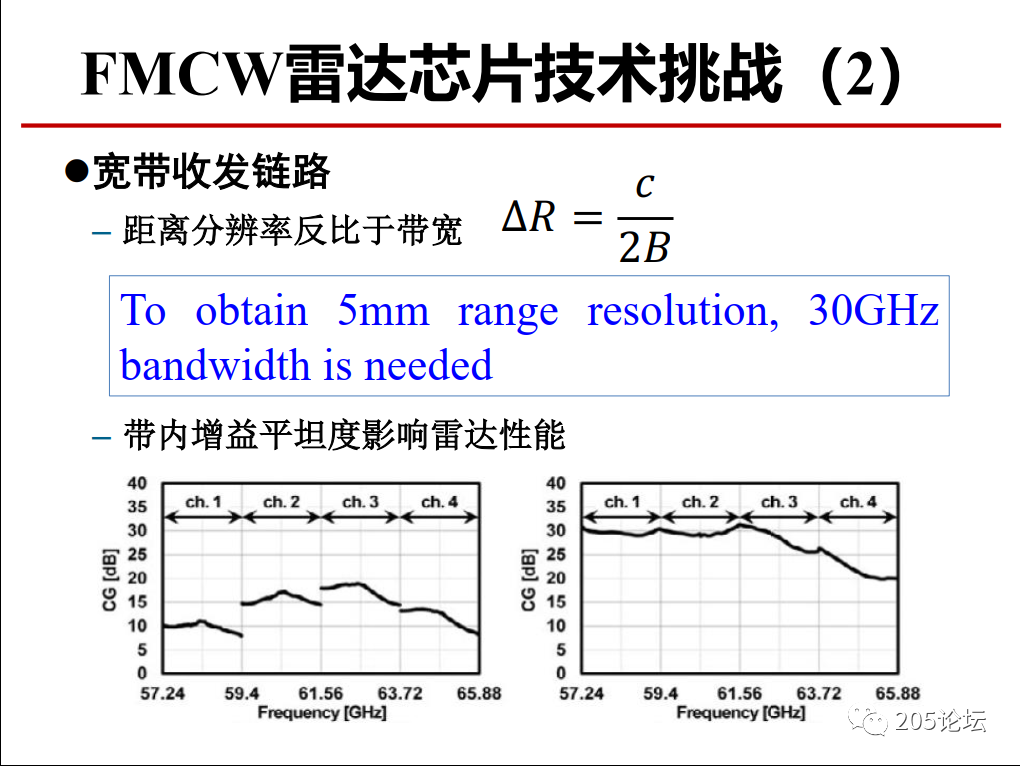
目前汽车毫米波雷达有较为明确的频谱规范,世界主要国家和地区都将77 GHz的频点分配给汽车雷达使用,其中包括欧盟、美国、加拿大、日本、中国等等,频段或许略有不同。毫米波在空气中的传播特性随着频率有较大变化,是频段选择的另一个依据。例如,短距雷达可选择衰减较大的频点,以减少雷达之间的相互干扰。毫米波雷达手势检测Soli芯片的工作频点选在处于衰减峰值的60 GHz。毫米波雷达的距离分辨率与带宽成反比,当需要较高距离分辨率时可选择更高的毫米波频段,以获得更高的可用带宽。另外一个关键的频段选择依据为毫米波雷达的成本。频段越高的毫米波雷达芯片,对晶体管的截止频率要求也越高,从而需要更先进的工艺节点,成本也愈加昂贵。
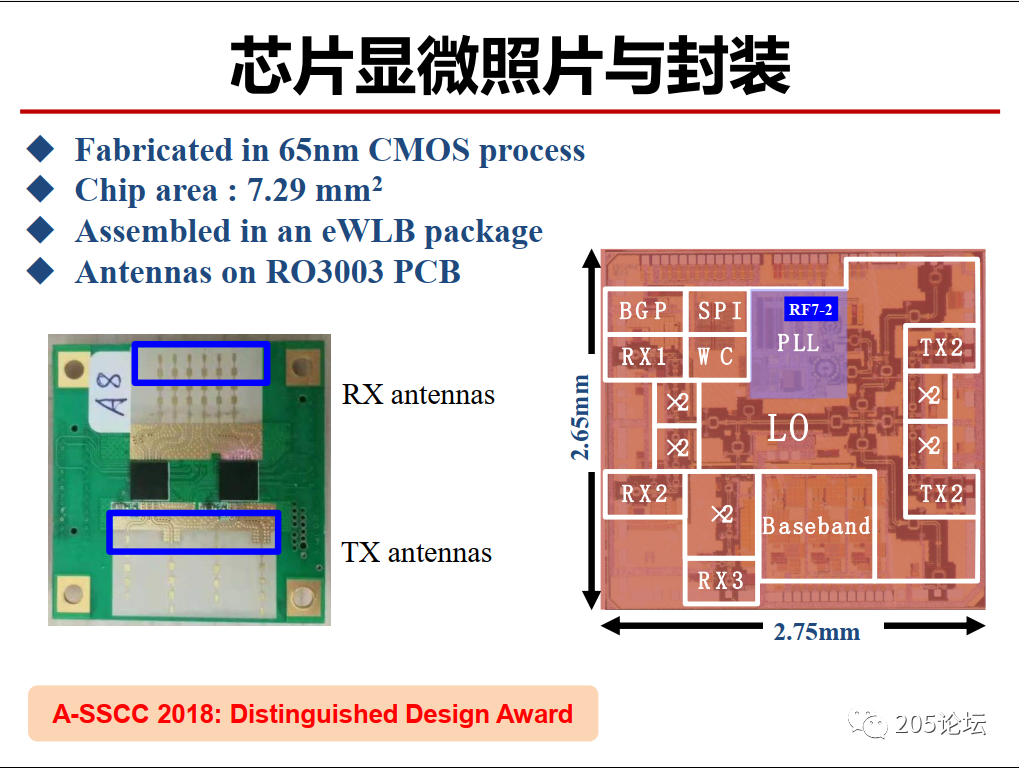
例如, 65 nm的CMOS工艺截止频率Fmax可到300 GHz,足够用于设计工作在60 GHz或77 GHz的雷达前端电路。若将工作频率提高到140 GHz,那么使用65 nm工艺的设计难度将急剧提高。频率越高,封装的信号完整性要求越高,封装的成本也越高。毫米波雷达芯片最终的频段选择,需要在这些因素中折中考虑。

毫米波雷达芯片技术
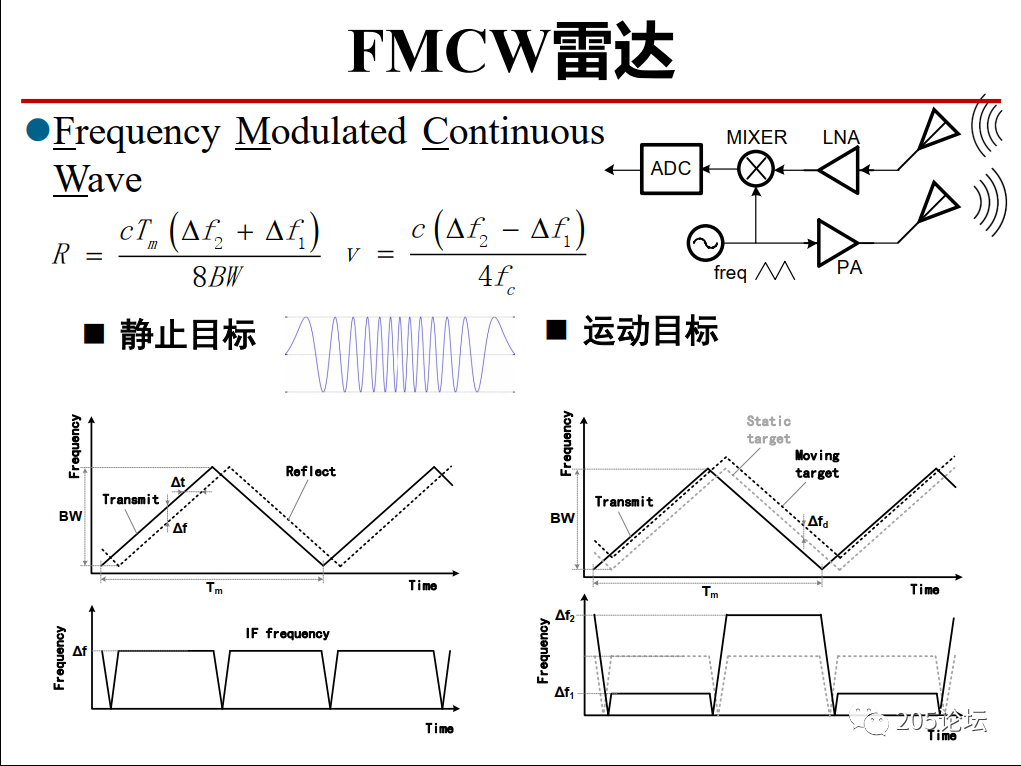
常见的雷达测距原理有脉冲和调频连续波(Frequency Modulated Continuous Wave, FMCW)两种。
在脉冲雷达中,雷达发射间歇性的脉冲信号,通过测量从目标返回的脉冲信号与发射信号之间的时间差即可计算出目标的距离。而FMCW雷达发射频率随时间线性变化的连续波,通过发射波与反射波的频率差来计算出目标距离。这两种机制各有优缺点。脉冲雷达间歇性工作,因而噪声小,可以检测到更微弱的信号,适合长距离的探测。
由于发射信号的多普勒效应,脉冲雷达可以方便地计算出目标的瞬时速度。FMCW雷达使用频率来计算目标距离,多普勒效应和目标距离造成的频差混淆在一起,不易区分开。为了克服这个问题, FMCW雷达需要发射多个不同斜率的连续波并对结果进行处理,否则容易产生虚假目标。
但是,对集成电路而言,测量时间差比测量频率差要困难很多,因此得到相同分辨率,脉冲雷达要比FMCW雷达昂贵。通常,由于瞬时发射功率过强而发射脉冲持续时间等因素,脉冲雷达存在近距离盲区(小于50~100 m),而FMCW雷达则无此问题。脉冲雷达的功率峰均比大,而硅基有源器件击穿电压过低,难以达到脉冲雷达的瞬时功率要求。最后, FMCW雷达的基带信号处理更容易,接收到的回波与发射波混频之后,中频频率在1 MHz的量级,对模数转换器(ADC)和数字基带的速度要求很低,可降低功耗和成本。上述这些特征使得硅基毫米波雷达更适合FMCW机制,文献中的毫米波雷达大多采用FMCW机制,也有少量毫米波雷达采用脉冲机制。

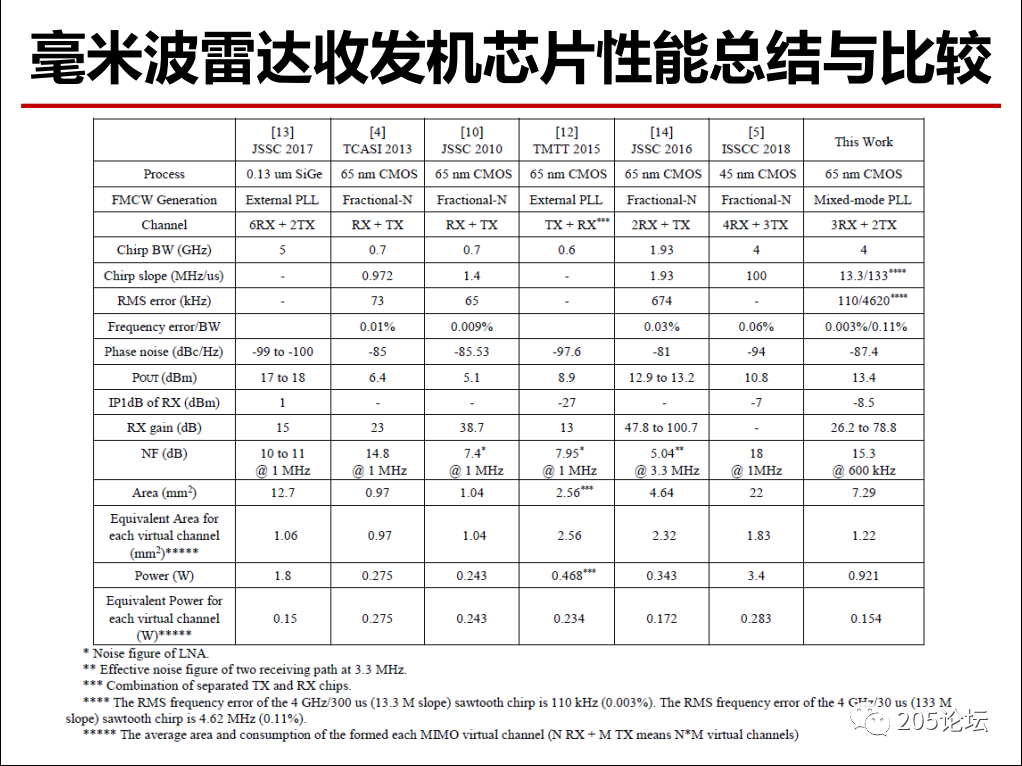
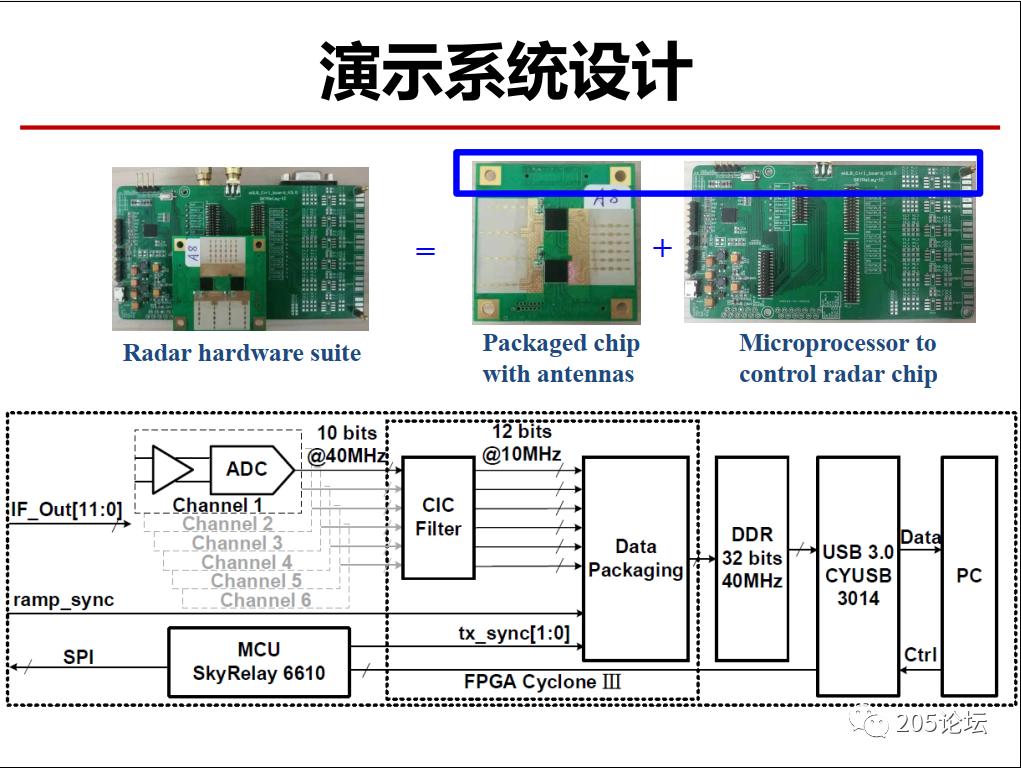
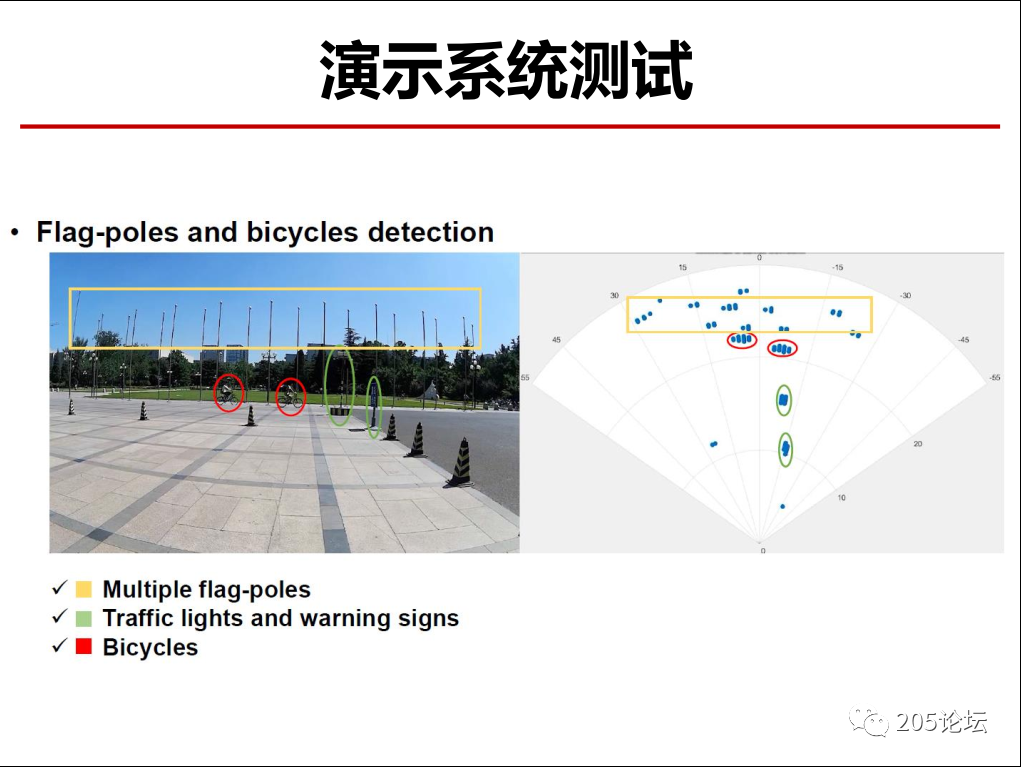
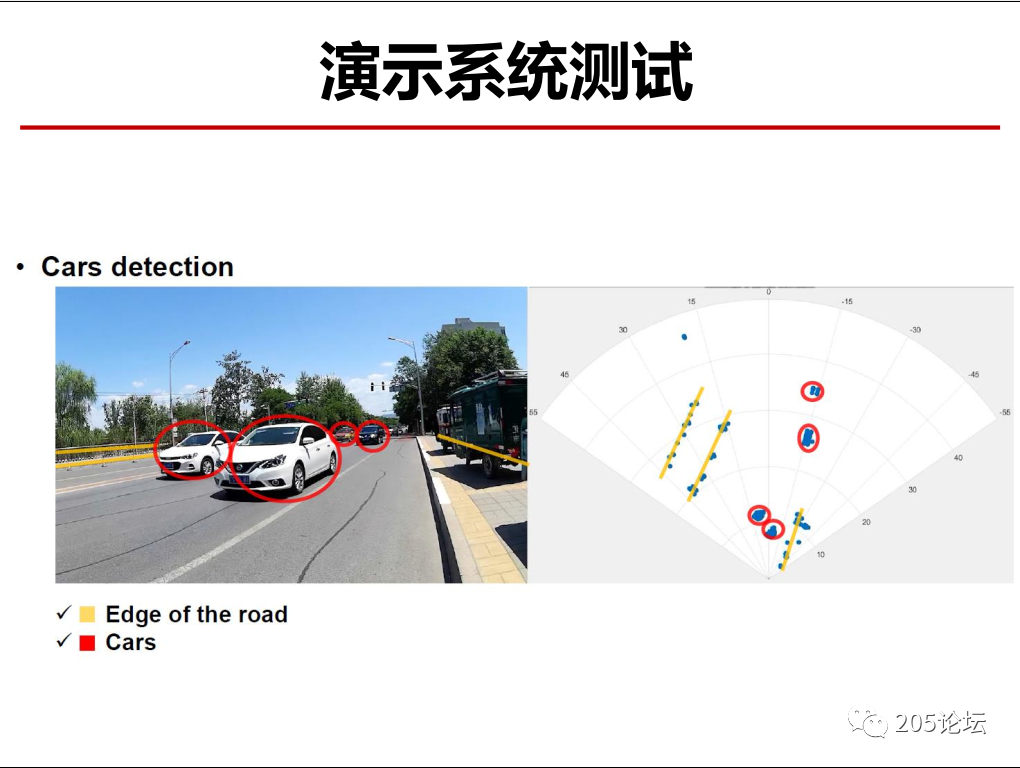
集成毫米波雷达芯片与雷达系统
结束语
毫米波可轻易穿透雪、烟、尘等复杂环境,使得毫米波雷达具备不可替代的优势,在汽车雷达、智能机器人等方面均有广泛的应用。随着半导体技术的快速发展,硅基工艺晶体管的截止频率提升,足以支撑起硅基毫米波雷达芯片的研究。硅基工艺在成本和集成度方面的巨大优势使硅基毫米波雷达吸引了来自学术界和工业界的大量研究。
不同的应用会有不同的侧重。在测距机制方面, FMCW体制的毫米波雷达结构简单稳定,中频频率低,很大程度的放宽了对ADC以及数字基带的速度要求,比脉冲体制更适合硅基芯片实现。PMCW体制可提供MIMO毫米波雷达所需的正交性,在MIMO雷达中得到应用。
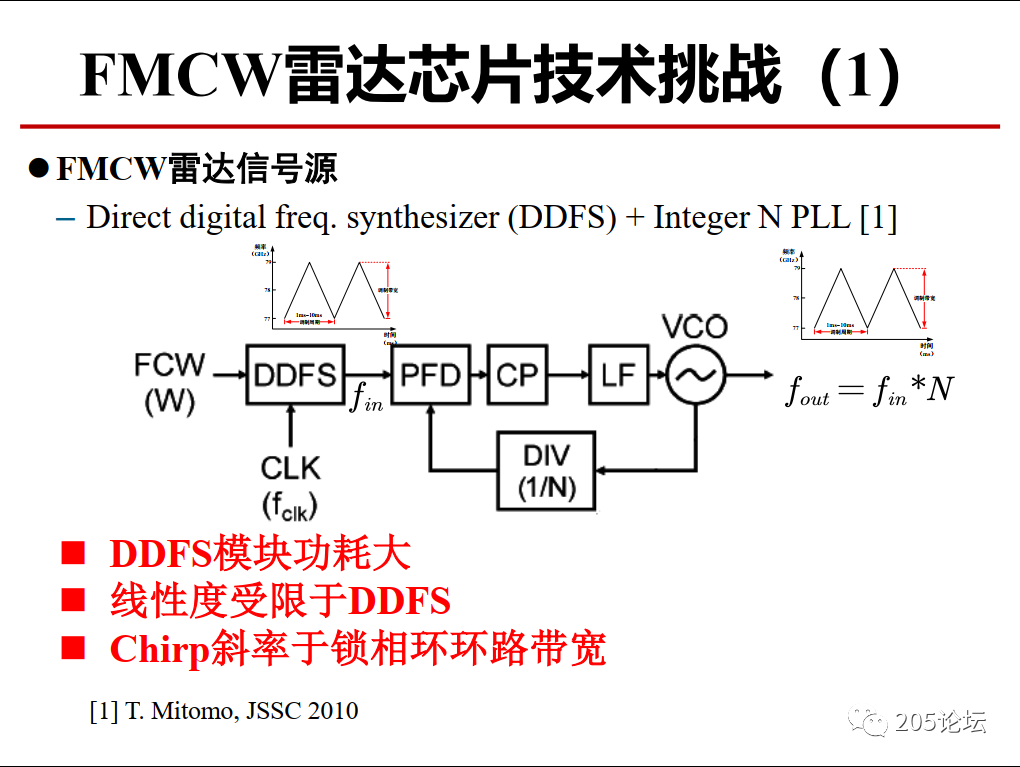
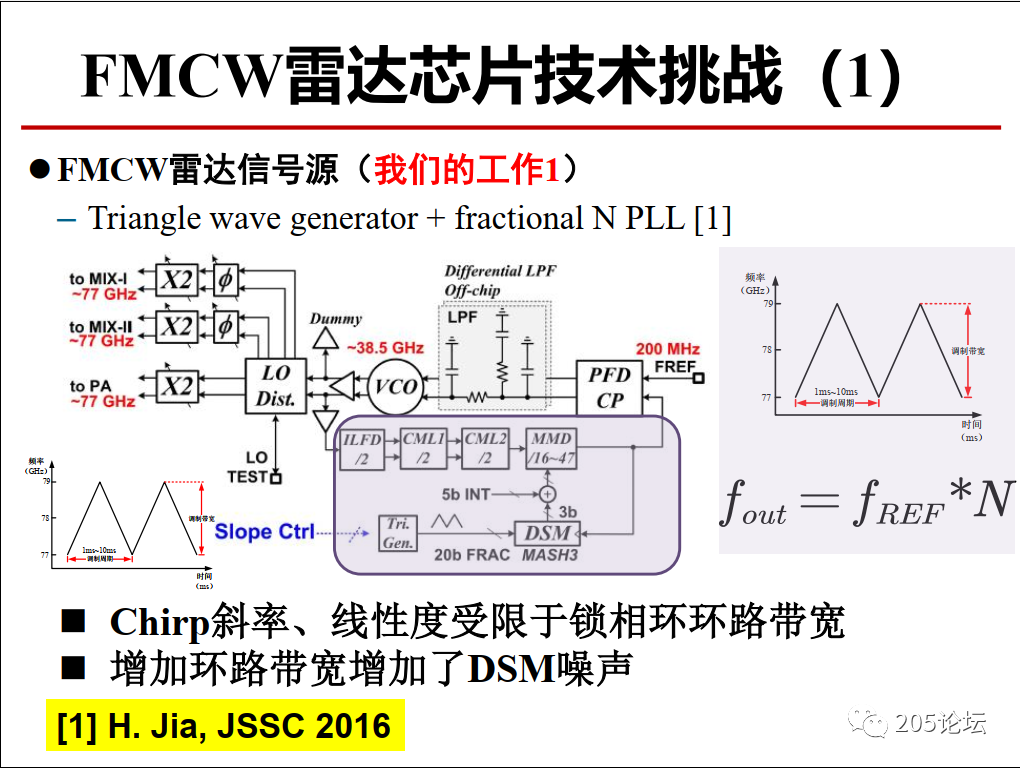
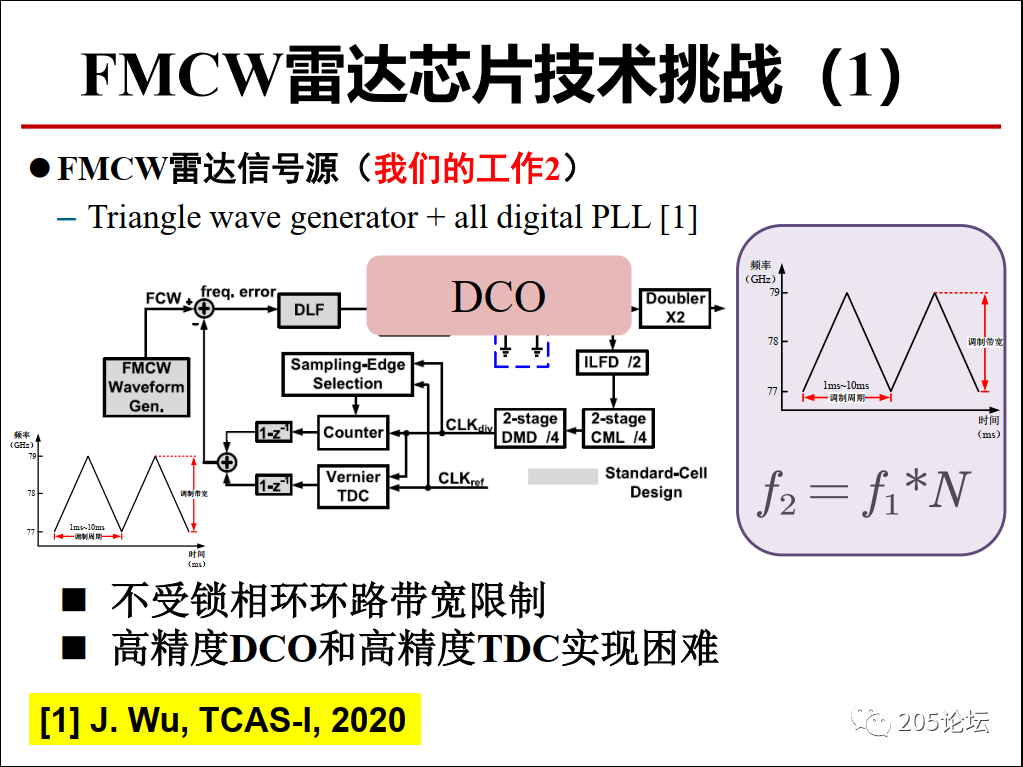
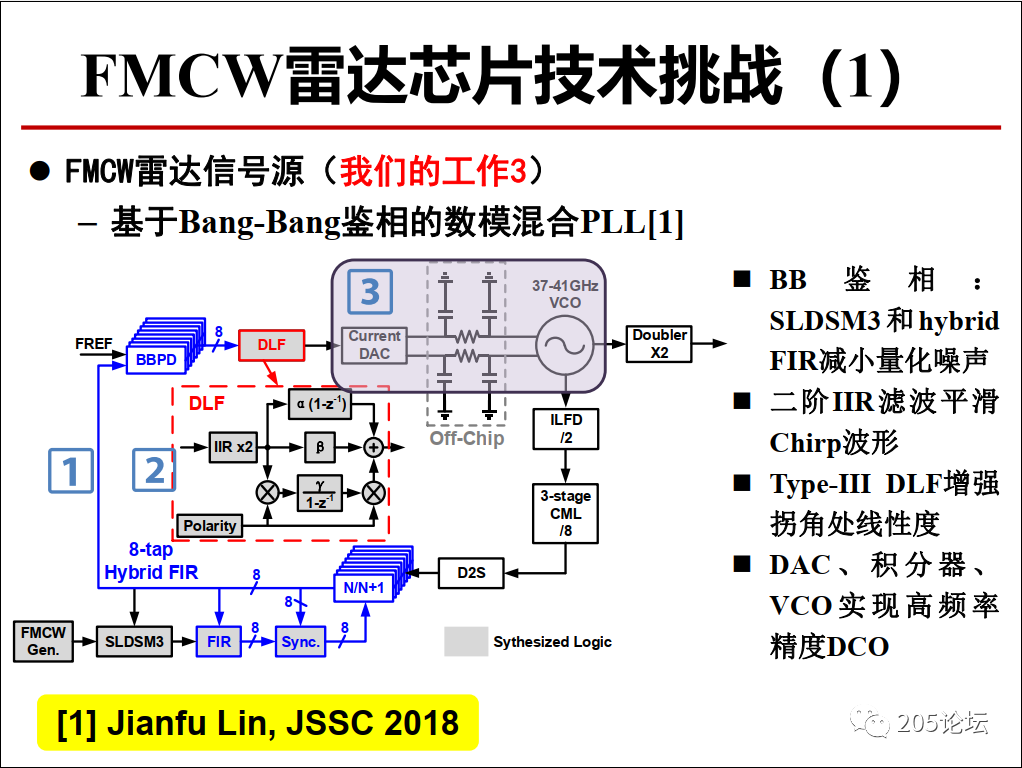
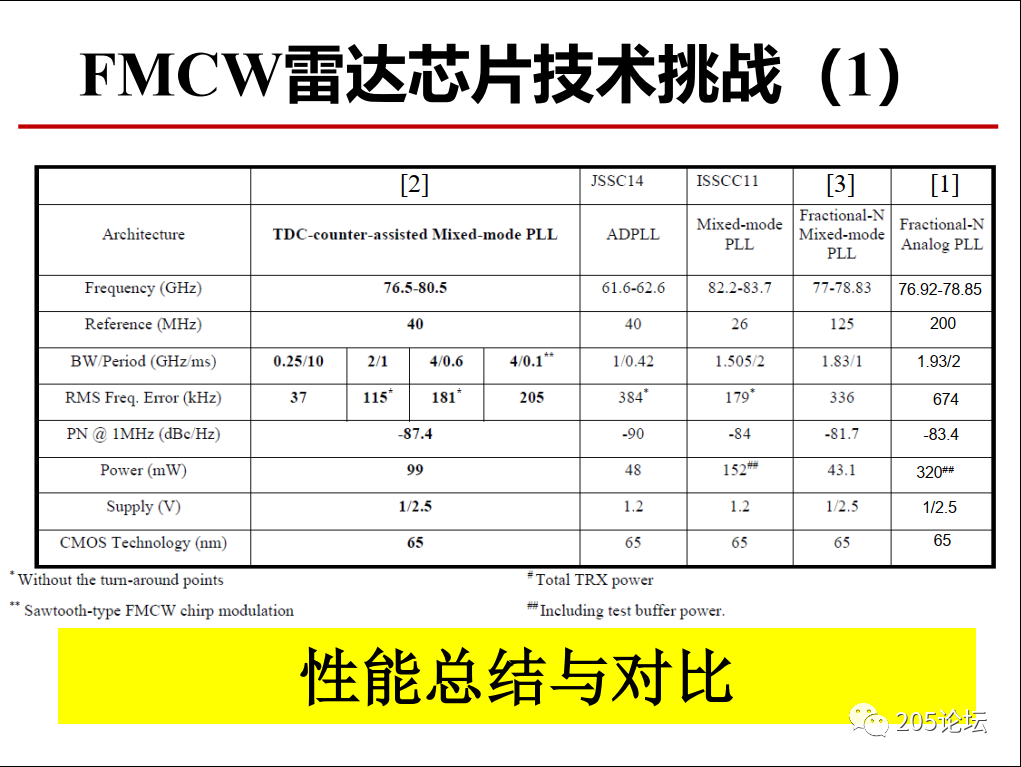
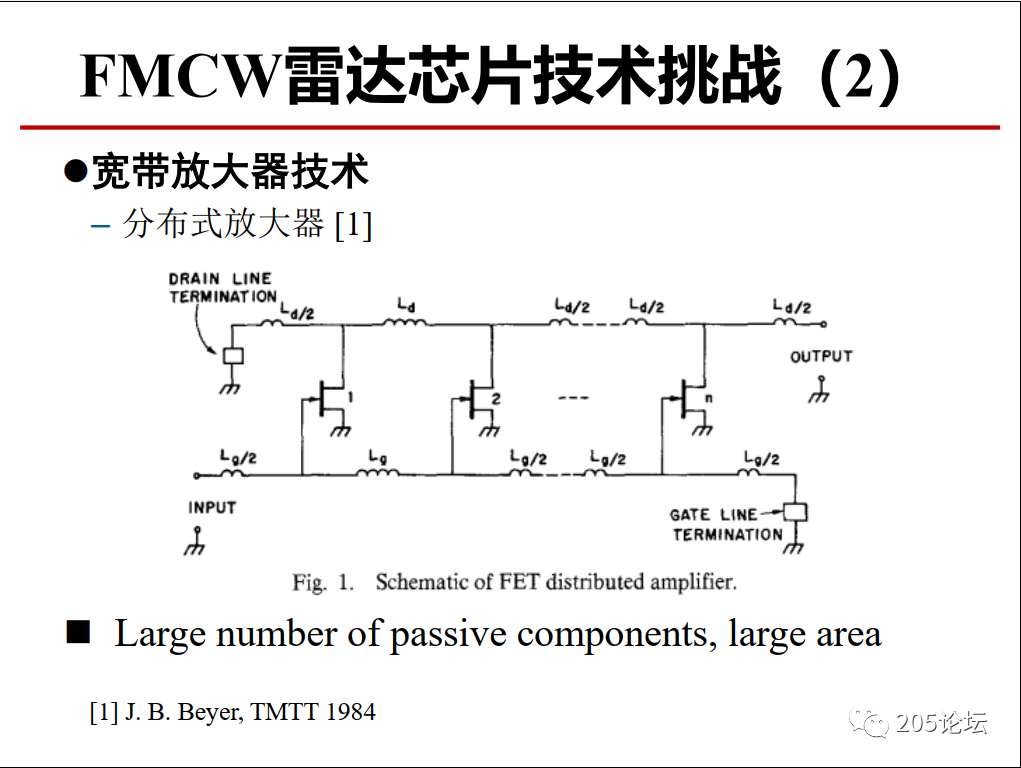
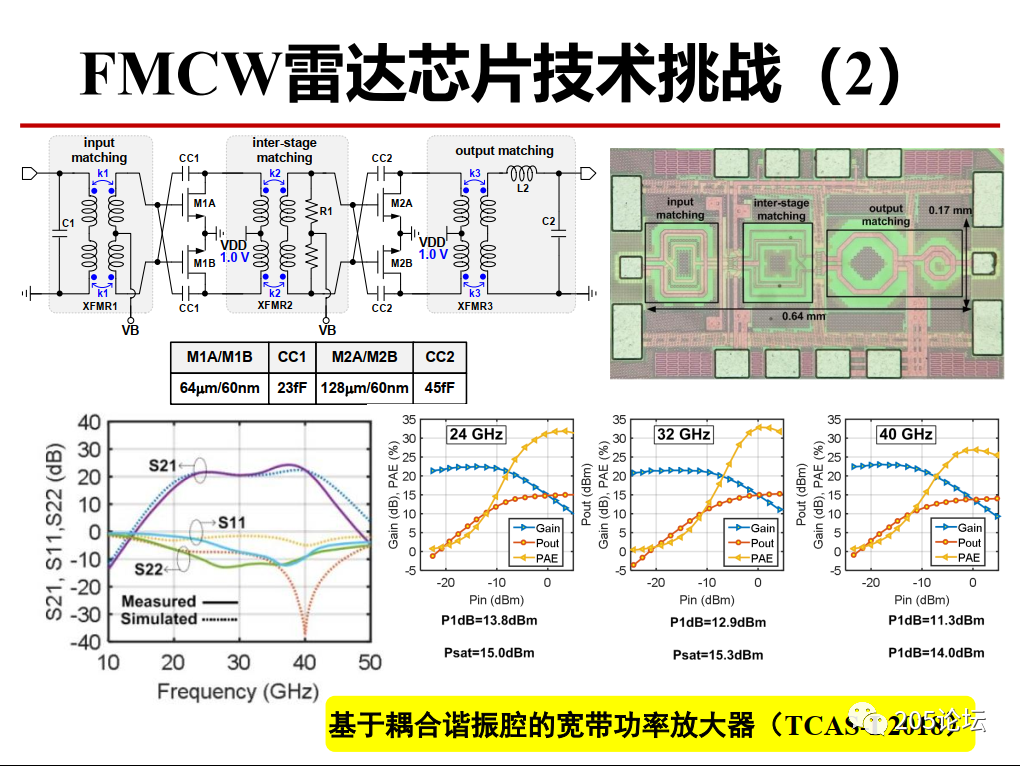
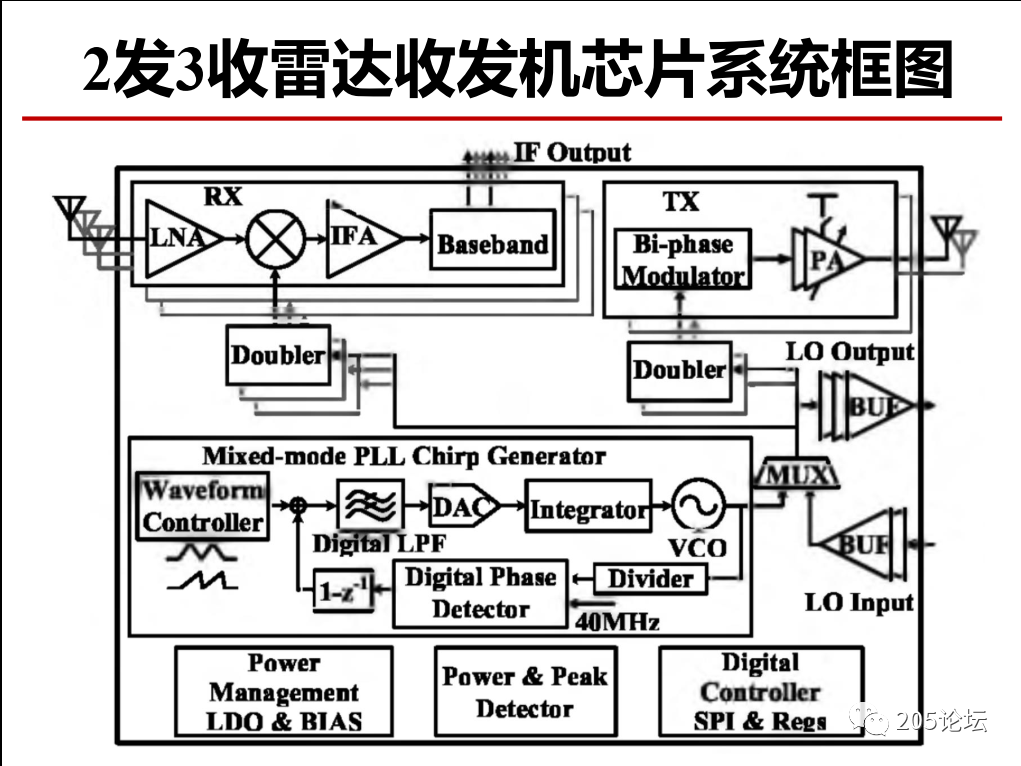
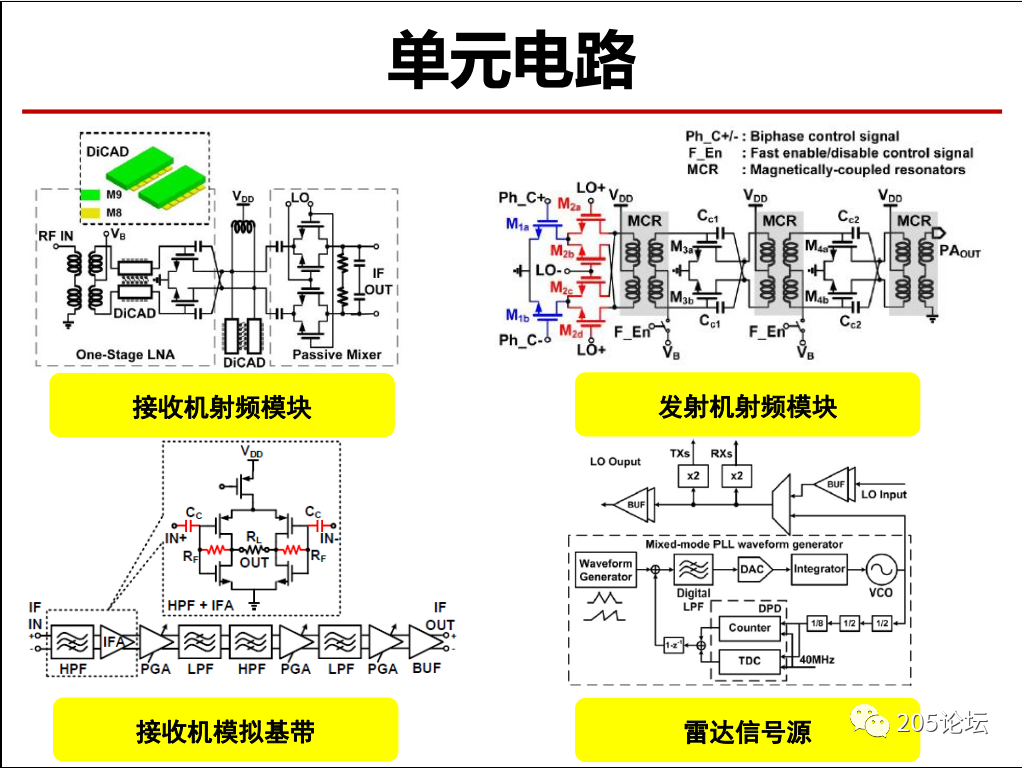
硅基毫米波雷达的关键电路模块包括FMCW信号发生器和功率放大器。 FMCW信号发生器主流采用锁相环来实现,实现方式包括模拟锁相环、数模混合锁相环和全数字锁相环。全数字锁相环在可控性、芯片面积、校准功能等方面有优势。功率放大器朝着更大的输出功率和更高的效率两方面进化。片上功率合成网络是提高输出功率的有效方式,有变压器合成和传输线合成两种主要的方式。
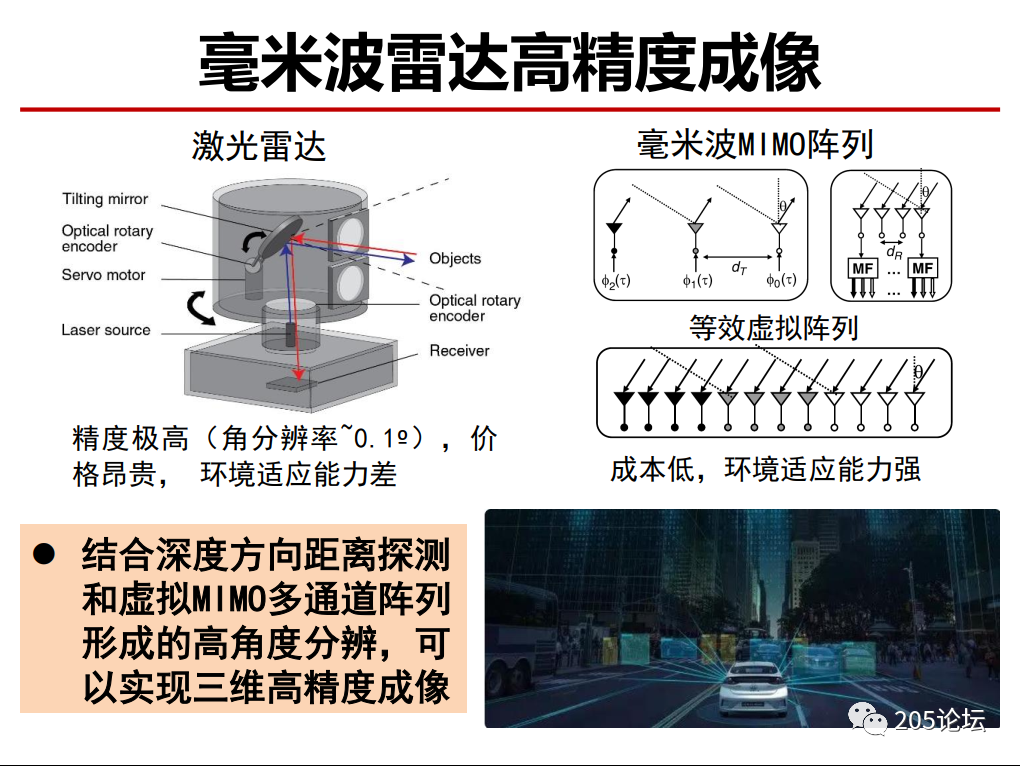
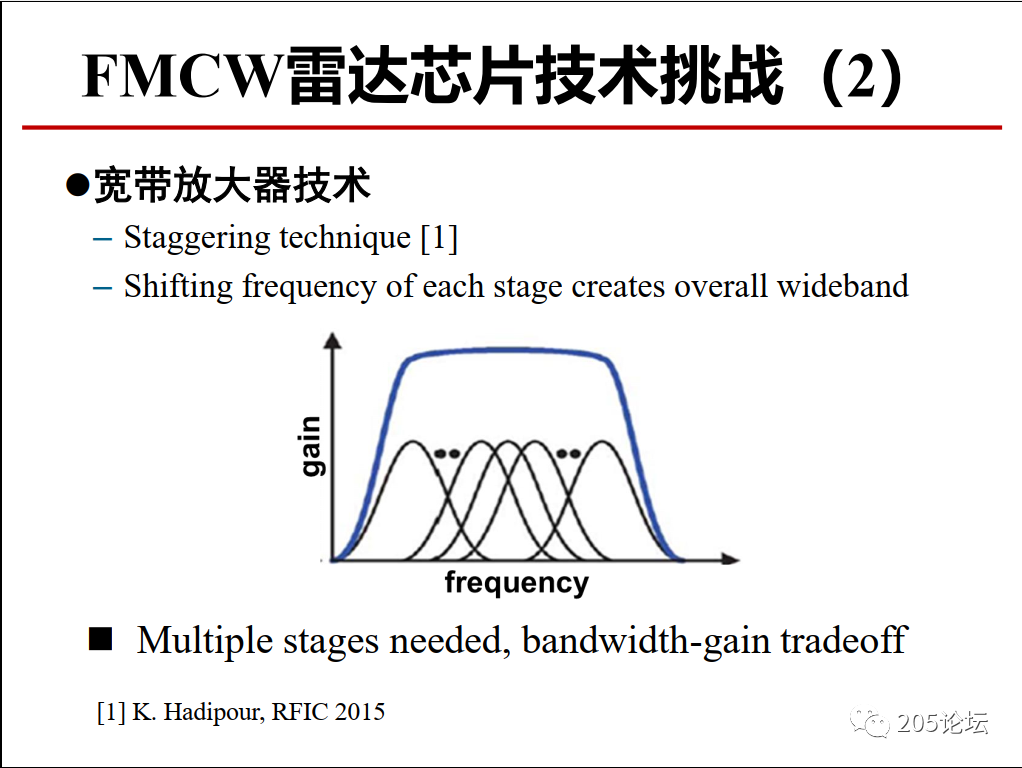
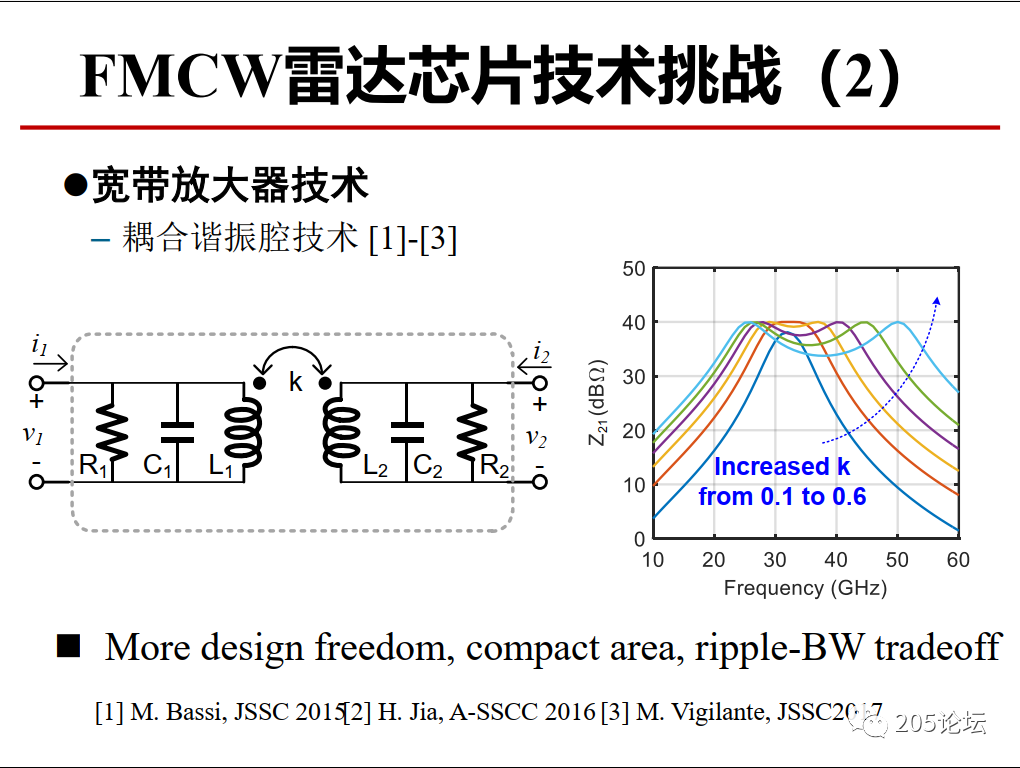
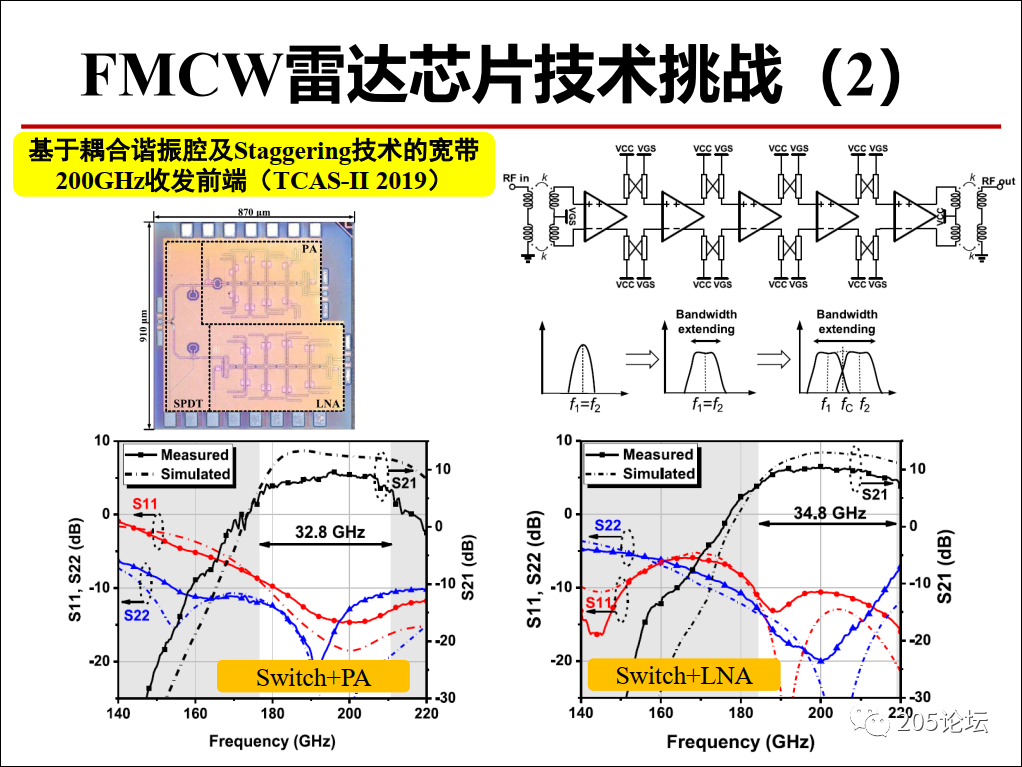
毫米波雷达的一个重要技术是宽带技术。片上变压器以与单电感相当的面积,实现了一个高阶匹配网络,在毫米波雷达芯片宽带匹配中有很大潜力。毫米波雷达封装和天线方面,封装天线很好的平衡了天线性能与成本,在目前的毫米波雷达中得到广泛应用。在今后的发展趋势中,毫米波MIMO3维成像雷达和快速扫频技术值得重点关注。
审核编辑 :李倩
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2358
-
漫谈车载毫米波雷达历史2022-03-09 12123
-
智能安防领域雷达技术应用,毫米波雷达模组,存在感应雷达发展2021-08-24 2321
-
毫米波雷达的特点是什么2021-07-30 7411
-
硅基毫米波雷达收发机芯片设计技术2020-09-02 5871
-
77G毫米波雷达在 ADAS 功能和 AD 自动驾驶中的角色和功能2020-06-03 6197
-
毫米波雷达(一)2019-12-16 15052
-
车载毫米波雷达的原理是什么?2019-08-07 7689
-
毫米波雷达是什么?2019-08-02 4737
-
车载毫米波雷达的技术原理与发展2019-05-10 6248
-
毫米波雷达方案对比2018-08-04 12514
-
探一探毫米波雷达技术的发展趋势2018-08-03 7748
-
毫米波雷达的应用场景_毫米波雷达技术及应用大解析2018-04-24 48490
-
毫米波技术及芯片详解2016-11-30 27350
全部0条评论

快来发表一下你的评论吧 !
