

使用MEMS与石英谐振器有什么应用优势
描述
近 20 年来,基于 MEMS 谐振器的振荡器一直存在,有望成为石英振荡器的可行、颠覆性替代品。多年来,已有十几家公司开始开发 MEMS 谐振器,而在此期间,只有一家公司成功地作为主要供应商幸存下来。
在使用 MEMS 谐振器时,有许多关于提高振动灵敏度、降低制造成本和提高可靠性的主张。然而,一旦你开始研究这些领域,数据有时无法呈现真实世界的情况。例如,基于 MEMS 的设备的平均故障间隔 (MTBF) 率为 130,000 年,而基于石英的解决方案为 30,000 年,这对于任何设计人员来说都不是主要问题。但是,当以 4 比 1 的时间间隔呈现故障时,这会在设计人员的脑海中产生不同的印象,而不会为部件的长期可靠性增加任何真正的优势。设计人员会认为 30,000 年是可接受的 MTBF 水平,因此这种说法没有实际意义。
MEMS 谐振器的关键特性之一是振动灵敏度(有时称为重力灵敏度或振动引起的相位偏移)。这在 2001 年左右得到认可,并已作为谐振器的一个关键破坏性特征推向市场。但是,一旦我们开始查看数据,就可以开始质疑是否有任何真正的优势。考虑以下:
典型的振动范围是从 sub-Hz 级别到 2 kHz
在大多数应用中,振动密度水平在 2 kHz 以上停止或大幅下降
根据相位噪声测量,相位抖动通常具有 12 kHz 和 20 MHz 的积分范围
这个范围是任何客户指定的最大振动水平的六倍
振动灵敏度测量单位是每克振动的十亿分之一 (ppb/g)
MEMS 振动灵敏度范围为 0.01 ppg/g 至 1 ppb/g,基于谐振器方向
石英振动灵敏度范围为 0.1 ppb/g 至 1 ppb/g,基于谐振器方向
石英制造商在过去 20 年中将振动灵敏度大大提高到 MEMS 水平
坯料尺寸的变化、更高频率的应用以及坯料对齐精度的提高是主要改进
这些变化大大提高了石英振荡器的振动灵敏度和冲击灵敏度
Renesas ProXO 系列 XF 和 XP 现场可编程时钟振荡器使用这些石英工艺改进来获得低冲击和振动灵敏度水平
振动引起的相位偏移(增加的相位噪声水平)与温度和网络引起的相位噪声互斥
振动引起的噪声是温度和网络引起的噪声的 rms 附加值
直到振动引起的噪声水平等于或高于温度和网络噪声引起的水平,振动引起的噪声可以忽略
如果我们查看基于 MEMS 的振荡器和基于石英的振荡器在 156.25 MHz、10 gs 的振动水平下的典型相位噪声水平,我们会看到:
在静态条件下,基于石英的振荡器的噪声通常比其 MEMS 对应物低 40 分贝
由于具有高连续振动水平,石英基振荡器的振动灵敏度等于基于 MEMS 的振荡器的静态振动水平
由于基于 MEM 的振荡器的静态和动态电平几乎相等,因此在此范围内其相位噪声电平几乎没有增加
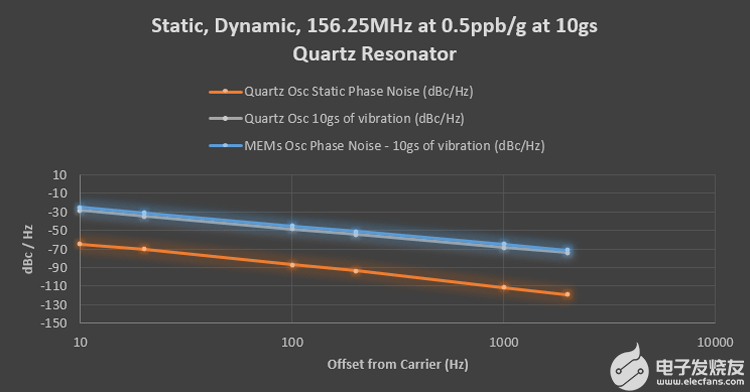
当在 10 Hz 至 2 kHz 的振动范围内发生 10 gs 的连续振动时,基于石英和基于 MEMS 的振荡器的相位噪声水平是相等的。但是,由于印刷电路板和系统内其他更大更重的组件的重量增加,在此频率范围内持续 10 g 的振动水平会导致产品的长期可靠性降低和损坏。假设 10 gs 只会出现一小部分时间,基于石英的振荡器将具有较低的相位噪声性能,使其成为现实世界条件的更好解决方案。
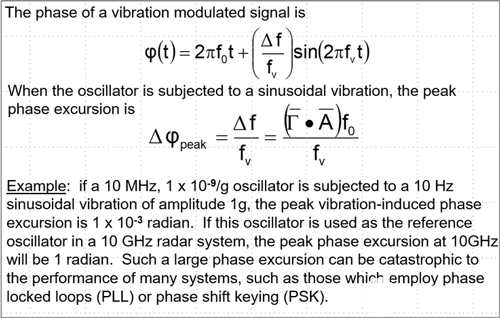
在 John Vig 关于石英晶体谐振器和振荡器的教程(2016 年 7 月)中,他详细概述了振动灵敏度的影响。从他的教程中,我们可以使用以下内容来查看振动灵敏度的影响(幻灯片 167,第 4-73 节)
通过此处查看的数据,我们发现使用 MEMS 谐振器振荡器与更常见和稳定的石英振荡器相比并没有真正的优势。因此,瑞萨在几年前从我们的产品组合中放弃了该产品,并继续专注于石英谐振器并改进我们提供的包含内部谐振器的设备,包括新的 ProXO 系列可编程时钟振荡器。
审核编辑:郭婷
-
石英晶振、MEMS晶振、陶瓷谐振器、SAW谐振器是什么?有什么特点2023-12-18 2934
-
石英谐振器应用中常见问题及解决方案2023-12-15 1324
-
石英谐振器的资料分享2022-07-29 1904
-
石英谐振器工作原理分析2022-06-10 5756
-
使用MEMS振荡器代替晶体谐振器的 8 大理由(一)2021-11-11 8185
-
石英晶体谐振器的外壳和压电特性2013-11-05 3892
-
石英谐振器的概述2010-02-06 1836
-
如何用在路测压法判别石英谐振器质量2009-08-03 541
-
石英晶体谐振器2008-11-24 5751
-
石英谐振器的符号2006-04-16 2453
全部0条评论

快来发表一下你的评论吧 !
