

 多功能模块化机器人科教实训平台简介
多功能模块化机器人科教实训平台简介
今日头条
描述
多功能模块化机器人科教实训平台
一、平台简介
当前机器人教学产业方兴未艾,如何提高学生的学习效率?最佳的方式是打通从原理教学到验证实践的快速开发路径,融合机器人软件设计、硬件设计、算法设计、应用开发等多个环节,实现一体化开发。多功能模块化机器人科研实训平台就是用来支撑学生进行工业机器人的基础知识学习和示教编程实操训练的。可以为学生提供良好的机器人实验平台,为老师提供算法验证的研发环境,为学科建设提供机器人专业综合解决方案。
1.1现状分析
l 智能制造工程专业:本专业培养具备掌握机械、自动化、智能化等智能制造相关学科基础知识及应用能力,能够从事智能产品设计制造,智能装备故障诊断、维护维修,智能工厂系统运行、管理及系统集成等方面工作的高素质应用型工程技术人才。
l 机器人工程专业: 机器人工程是一个多维交叉,多学科融合的新学科,与各种专业都有关联。机器人的结构部分需要机械专业来完成,内部电路涉及电气等专业,运动系统控制和感知规划又与控制专业有关,智能感知、决策方面又涉及计算机、人工智能专业知识,同时材料科学、力学等专业也与机器人工程息息相关而机器人工程专业的多维交叉性又恰逢目前国内自动化与智能汽车及其他相关“新四化”领域人才展需求。
如何在师资,场地、资金有限的条件下,设计、实施满足多学科交叉融合、软件化、数字化等趋势需求的智能制造人才综合实训平台还是有相当难度的。
1.2设计思想
l 针对融合化趋势:需要打通感知、控制、 智能决策等多个环节;
l 针对软件化趋势:新工科专业学生都应该具有一定的软件编程训练;
l 针对数字化趋势:应该具有一定的系统建模、仿真和三维呈现能力。
综合实训系统应该能在三个层级配合教学过程实现递进式的培养。
层级一是认知和使用层面的“知其然”,可以分阶段的了解和学习工业机器人和智能制造系统的使用过程。
层级二是理论体系建立层面的“知其所以然”,可以了解与自己探索与使用过程相关的底层原理和技术试验方法。
层级三是面向未来需求的“创未然”,创造尚未出现的机器人与智能制造系统。
1.3关键技术
中国科学院沈阳自动化研究所(简称“沈自所”)作为长期从事机器人技术的专业研究所,不断研发出新的智能机器人成果、拥有专业的科研团队和完整的国家级平台资源。面向机器人人才培育主战场,深入推动机器人技术产业化应用是我所积极响应国策倡导,推动产学研结合带动自身发展,促进支柱产业协同创新升级,引导培育新型教学装备产业的必然之路。
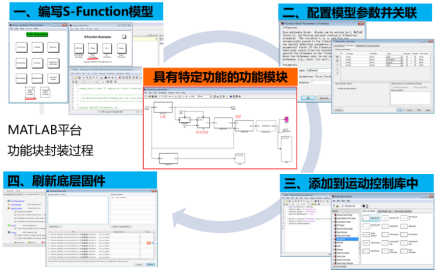
沈自所研发的开放式机器人控制系统,通过MATLAB自动代码生成方式实现一体化关节、机器人运动控制、机器人力位混合控制、机器人视觉集成、机器人人工智能等多层次实验环境,打通了机器人算法仿真到真机部署的全流程。
为了加速机器人应用型的人才培养,沈自所致力于打造机器人教学生态,整合国内机器人科研研发力量,面向国内高校,整个系统内部深度开发,助理机器人与智能制造相关专业的平台建设。
二、平台特点
多功能模块化机器人科教实训平台以六或七自由度机械臂为被控对象,覆盖了主流工业机器人品牌,包括ABB、KUKA、UR、珞石、Aubo等。采用模块化设计理念,具备理实一体、虚实结合、开源开放、易学易用等特点,极大的提高师生的参与程度,为实验室建设提供多用途、层次丰富、省空间、安全易用、开放可升级的综合实训系统。
2.1理实一体
平台以机器人原理教学为基础,包括机器人建模、运动学、动力学等内容,通过算法开发、仿真实验、真机实验等过程,加深理论与实践相结合的学习。以实操训练平台为扩展,支持搬运、打磨、码垛等工艺,以项目开发为驱动,强化平台的实践性和实用性。使学生达到理论联系实际、活学活用的培养目标,提升其实际应用技能。
2.2虚实结合
支持在不启动操作臂的情况下进行算法的离线仿真验证。支持虚拟机器人显示,保证了控制效果的可观察。
2.3开源开放
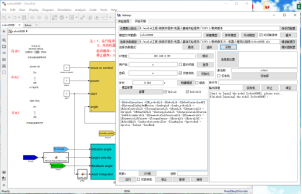
在机器人可视化集成开发环境中,通过抽象化通讯协议模型,统一控制代码与物理仿真的软件模型,在机器人系统设计层面隐藏不必要的细节,实现机器人系统应用的一体化建模与管理。用户可以开发自定义模型库,用于机器人相关算法的积累。
针对开发的深度不同,提供了不同层级的开发,满足不同层次的开发需求。深度开放,满足定制化开发。
对于不同构型和自由度的操作臂具有统一的操作接口。仅需要通过简单的配置即可实现不同种类操作臂的快速适配。
2.4易学易用
Matlab/Simulink下建立的动态系统数学模型应用于实时仿真、算法测试,便于全流程控制和局部算法验证。
高度集成的机器人编译环境保证了模型的可靠性、准确度及更小的仿真步长,提高了模型运算速度和控制精度。
涵盖机器人基础理论和高级控制算法库,集成多种总线通讯模块,建立运动学、动力学模型,兼具视觉、力觉等处理能力。
三、平台组成与功能介绍
3.1总体构成
多功能模块化科教实训平分为三个柜体组成,分别是:主机台、程控台、气动台。总体尺寸为1500*1200*900,程控台和气动台尺寸都为400*1200,主机台尺寸为700*1200。
3.2模块化机架
三个分别为独立主体,可根据用户提供定制化方案,单个主机台可做原理科研教学,三个柜体合并在一起既可做实训又可做原理科研教学还可以拆分成产线,满足学校定制化开发的需求。
主机台主要放置原理教学模块:
1、机器人;2、机器人快速原型控制器;3、相机;4、六维力传感器;5、遥操作手柄;6、平面轨迹/立体轨迹模块;7、标定座模块;8、气动模块等。
程控台主要放置实训教学模块:
1、PCL模块;2、传送到模块;3、码垛模块;4、井式供料模块;5、光栅模块等。
气动台主要放置实训教学模块:
1、静态立库模块;2、打磨模块;3、书写模块;3、光栅模块等。
3.3 工业机器人
珞石x系列机器臂 XB7
产品基本参数
| 自由度: | 6 | 本体质量: | 约50Kg | 储藏温度: | ﹣10°C/+55°C |
| 手腕负载: | 7Kg | 防护等级: | IP54(IP67可选) | 环境温度: | 0°C/+40°C |
| 最大工作半径: | 707mm | 噪音水平: | ≤70dB(A) |
|
|
| 运动参数 | 轴 | 运动范围 | 最大速度 | ||
| 轴1 | ±170° | 440°/s | |||
| 轴2 | ﹣135°/﹣90° | 355°/s | |||
| 轴3 | ﹢65°C/﹣195°C | 440°/s | |||
| 轴4 | ±170° | 480°/s | |||
| 轴5 | ±120° | 450°/s | |||
| 轴6 | ±360° | 705°/s |
3.4机器人快速原型控制器
机器人快速原型控制器包括通信模块、运动控制模块和安全模块,实现多种构型机器人控制。可以快速搭建机器人研究或应用平台,支持机器人控制算法验证及机器人应用的快速开发。
特征优势
l 统一的操作接口、仅需要简单的配置即可实现快速适配;
l 支持多机器人协同作业,支持工业OPC-UA通信;
l 运动控制支持CIA402协议,支持通用构型的运动控制;
l 安全模块包括支持分布式时钟、支持冗余、支持热插拔和支持运动状态检测等。
机器人模型库
l 机器人单轴控制库
l 机器人接口库
l 机器人基础控制库
l 机器人3D显示库
l 传感器接口库
l 末端执行器接口库

被控对象示例
Ø 实现自主控制的多种被控对象,包括工业机器人、无人机、倒立摆系统。
Ø 多种不同构型机器人的控制,协作7轴机器人、双臂机器人、并联机器人等。
Ø 支持c、c++、Matlab等多种语言开发,兼容通信、视觉、力觉等传感器处理功能。
3.5实训模块
(可根据用户需求进行针对性选择或定制)
四、实验与支撑课程
4.1机器人原理教学
基础实验:
| 序号 | 实验名称 | 课程内容 |
| 1 | 机器人系统认识 | 了解机器人系统的基本组成,培养学生理论联系实际的能力。 |
| 2 | 机器人空间位姿描述 | 认识机器人位置与姿态的描述方式,了解多种姿态的描述方法 |
| 3 | 建立连杆坐标系及D-H参数 | 学习机器人连杆坐标系的建立,学习修正D-H参数的建立方法 |
| 4 | 机器人正运动学 | 学习连杆变换,学习建立机器人的正运动学方程 |
| 5 | 机器人逆运动学 | 解逆解相关的基本概念,如:多解性,奇异问题等,学习建立机器人的逆运动学模型。 |
| 6 | 机器人关节空间规划 |
了解多种规划方法,了解关节空间规划特点 ,学习在关节空间实现机器人运动轨迹的规划 |
| 7 | 机器人笛卡尔空间规划 | 了解笛卡尔空间规划特点,学习笛卡尔空间直线规划方法 |
| 8 | 机器人雅可比矩阵 | 了解雅可比矩阵及作用,学习雅可比矩阵的推导方法 |
| 9 | 机器人动力学 | 了解动力学模型的描述形式及作用,学习动力学模型的推导方法 |
| 10 | 机器人动力学参数辨识 | 了解动力辨识的目的,学习动力学辨识方法 |
| 11 | 机器人的拖动示教 | 学习拖动示教算法,学习利用拖动示教算法实现机器人的控制 |
| 12 | 基于末端力矩传感器的拖动示教实验 | 学习基于末端力矩传感器的拖动示教算法,学习基于末端力矩传感器的拖动示教算法实现 |
高级实验:
| 序号 | 实验名称 | 课程内容 |
| 1 | 机器人的PID控制 | 学习PID控制方法,学习利用PID实现机器人的控制 |
| 2 | 机器人的动力学前馈控制 | 学习动力学前馈控制算法,学习利用动力学前馈控制算法实现机器人的控制 |
| 3 | 机器人的拖动示教 | 学习拖动示教算法,学习利用拖动示教算法实现机器人的控制 |
| 4 | 基于末端力矩传感器的拖动示教实验 | 学习基于末端力矩传感器的拖动示教算法,学习基于末端力矩传感器的拖动示教算法实现 |
| 5 | 基于末端力矩传感器的导纳控制实验 | 学习基于末端力矩传感器的阻抗控制方法,学习基于末端力矩传感器的阻抗控制方法方法实现。 |
4.2机器人实训教学(选配)
| 序号 | 实验名称 | 课程内容 |
| 1 | 工业机器人认知 | 了解工业机器人的工作原理、系统组成及基本功能、掌握工业机器人的性能指标 |
| 2 | 工业机器人的基本操作 | 掌握工业机器人示教器、以及在不同坐标轴下的基本操作 |
| 3 | 机器人轨迹规划编程实验 | 通过示教器编写相应代码,实现工业机器人轨迹规划。 |
| 4 | 机器人书写编程与操作 | 学习并掌握机械G代码,通过G代码编程输入到示教器中,让机器人能够书写 |
| 5 | 视觉检测编程与操作 | 学习视觉检测系统程序改写与改参,检测出实际工况所物体。 |
| 6 | 机器人搬运编程与操作 | 通过示教器编写相应代码,加上相应模块,实现工业机器人搬运。 |
| 7 | 机器人码垛编程与操作 | 通过示教器编写相应代码,加上相应模块,实现工业机器人码垛。 |
| 8 | 机器人打磨编程与操作 | 通过示教器编写相应代码,加上相应模块,实现工业机器人打磨。 |
| 9 | 机器人离线编程实验 | 学习离线编程程序,可以实时进行仿真相关实验 |
4.3机器人视觉教学
| 序号 | 实验名称 | 课程内容 |
| 1 | 机器人视觉认识 | 认识机器人视觉,了解机器人视觉任务需求 |
| 2 | 机器人视觉相机标定 | 学习二维及三维相机图像的数据获取,学习相机的标定 |
| 3 | 机器人视觉对象识别及坐标系转换 | 通过图像处理方法找到图像中的物体,学习图像坐标系到世界坐标系的变换的实现 |
| 4 | 机器人视觉手眼标定 | 学习机器人的手眼标定方法,学习机器人的手眼标定方法的实现 |
| 5 | 机器人视觉引导抓取 | 学习机器人视觉引导的原理,学习机器人视觉应用搭建 |
4.4机器人科研创新
(1)机器人下棋
有两台工业机器人和一个棋盘组成组成,通过下棋博弈系统,由下棋AI测试与相机视觉感知、棋盘态势识别、以及机器人运动控制共同进行实现机器人对弈下棋操作。也可在V-rep进行虚拟仿真实验。
(2)机器人打乒乓球
通过视觉系统及人工智能算法基于机器人打球的权利。不论是教学或是训练都能提供可量化的表现,通过调参可以给出针对性的训练方案以及科研参数供给用户去学习以及使用,将学习与训练提高效率。
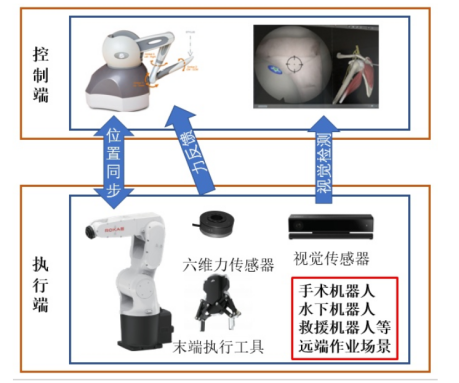
(3)遥操作
“远程控制”工业机器人,通过多轴手柄来实现机器人操作。
·能够进行快速力反馈设备(主)及机器人(从)信息交互;
·精确的进行主从设备位置、速度、力的相互转换:基于运动学及动力学辨识补偿实现。
·结合人工智能+视觉:搭建以智能硬件为依托,智能感知为辅助,智能控制为核心的新型遥操作机器人拓展思路。
(4)乱序抓取
将数量较多的工件无序地放在料框里面,经过视觉识别,要快速识别无序工件,提高工作效率。
通过三维结构光面扫描技术,可以识别无序工件的位置,智能引导机器人定位抓取。抓取是工业机器人应用的一个大方向,而之前线激光或者二维视觉引导抓取,有着自身的局限性。未来在更多场景下可以选用三维面视觉技术解决抓取难题。
(5)曲面打磨
通过末端打磨头可实现全姿态力/位混合控制补偿,适用任意外形工件的表面处理,并保证接触力精确与稳定,适配多种大型工业机器人。
审核编辑:汤梓红
-
多功能模块化机器人产品手册2022-05-10 1179
-
ZN-IRW02工业机器人装调维修实训平台概述2021-09-17 2119
-
ZNL-Z07多功能机器人实训工作站有何功能2021-08-16 2354
-
ZN-RAI02工业机器人与视觉实训平台有哪些配套软件2021-08-09 2509
-
工业机器人综合实训平台实验2021-07-01 2885
全部0条评论

快来发表一下你的评论吧 !
