

MIT研究人员提出了一种制造软气动执行器的新方法
描述
麻省理工学院 (MIT) 的研究人员创造了一种新的制造技术,可以制造出更具成本效益的软气动执行器。
设计辅助可穿戴设备和机器人技术最困难的挑战之一是模仿人体错综复杂的独特方面。具体来说,重建人手的运动、精度、控制和感知能力一直是学术界和工业界都非常感兴趣的话题。
在这里,经济挑战与技术挑战一样重要,复杂的系统将成本高昂且难以制造。
本周,麻省理工学院的研究人员提出了一种制造软气动执行器的新方法,希望能够降低此类系统的成本。
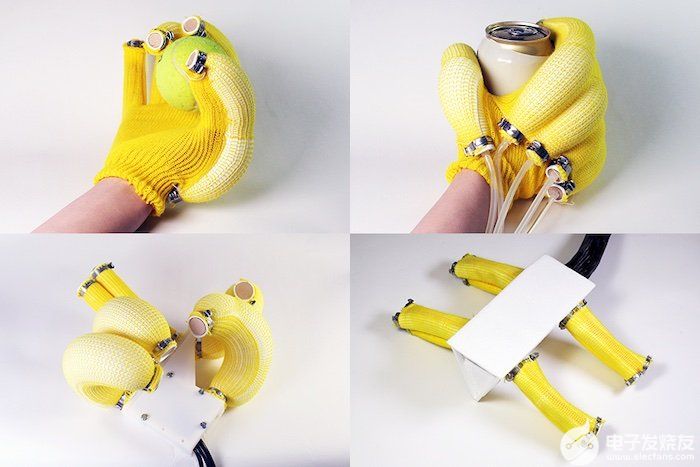
麻省理工学院的香蕉状软执行器。
本文将讨论气动执行器、它们的一些相关用例,以及麻省理工学院的新研究如何影响该技术。
用于人体触摸的软气动执行器
在设计模仿或辅助人手的系统时,存在许多重大挑战和权衡。
人手的独特之处在于它结合了高水平的精确度、力量和控制力,同时又温和且战术敏感。重新创建这一点成为创建轻量级、可定制且有效的系统的挑战,该系统在抓取时也不会破坏所需的对象,就像手知道何时停止挤压一样。
这个问题的一个高度吹捧的解决方案是软气动执行器。
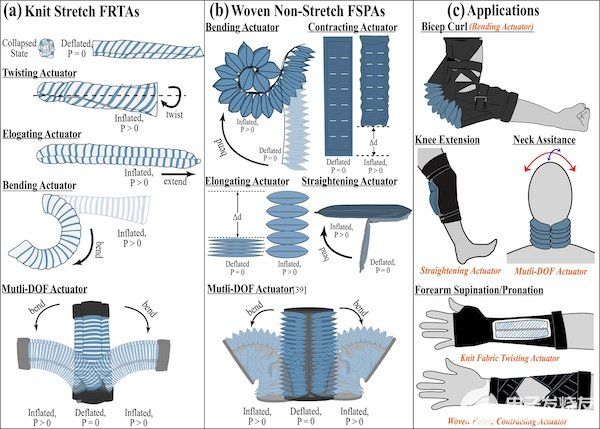
基于织物的软气动执行器示例。
软气动致动器是结合了气动致动器的低响应时间和大输出功率与可模拟活组织的软材料的设备。这些软材料通常是弹性体,如硅胶或基于织物的针织材料。
借助软气动执行器,机器人专家可以实现动力、控制和灵活性的基本组合,同时确保对抓取的物体进行仔细和安全的护理,这要归功于所使用的软材料。
制造软气动执行器的挑战
虽然被证明是一种高效技术,但软气动执行器历来面临各种制造挑战。
据麻省理工学院的研究人员称,过去曾尝试使用不同的技术来制造此类设备,包括:
组合不同刚度的织物
用纱线特性编程纺织品刚度
运用独特的针织成型技术
在纺织品上浇注外加筋
然而,大多数现有技术的挑战是劳动密集型和细致的。
除此之外,许多先前尝试的技术都无法在制造过程中将传感能力集成到软材料中。这一困难代表了进一步的挑战,因为传感材料必须要么在材料中进行后处理,要么完全被遗忘。
总而言之,创建具有成本效益的软气动执行器的“理想”解决方案需要工程师可以自动化、轻松集成到现有工作流程中,并包含无需后处理的传感功能。
麻省理工学院的 PneuAct 方法
本周,麻省理工学院的研究人员宣布了一种制造气动软执行器的新方法,该方法声称可以解决现有工作流程的许多挑战。
在他们最近发表的论文中,研究人员描述了他们被称为 PneuAct 的新方法,该方法被称为“用于计算设计和数字化制造软气动执行器的可扩展管道”。
执行器本身仅由一个标准硅胶管组成,该硅胶管由特制的针织护套覆盖和限制。
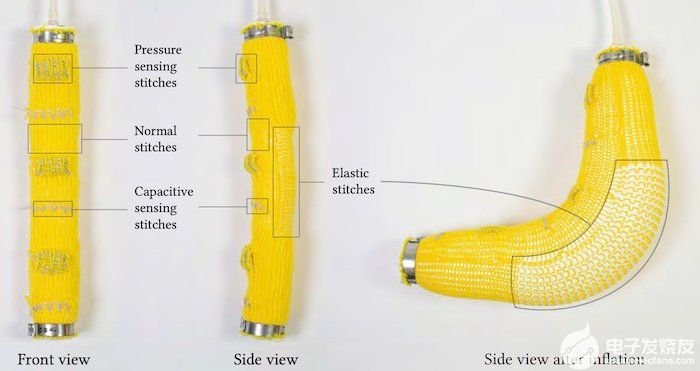
软气动执行器由硅胶管和特殊编织的护套组成。
针织护套是使用机器针织工艺创建的,以创建弹性针迹,以创建影响致动器在充气时弯曲的非均匀结构。
充气时,致动器的变形主要由编织护套定义。除此之外,研究人员还能够通过使用精心编织的导电纱线将压力和电容传感结构集成到执行器中。
这项新技术的一个重要方面是使用机器编织方法,与其他方法相比,它可以提高速度、数字可编程性和获得更多材料。
结果,研究人员表明,他们的方法允许他们在一次机器运行中自动创建一个完整的针织结构。
总体而言,此类旨在寻找新的和可能更好的制造技术方法的研究可以成为推动技术进步的实际下一步。看看软气动执行器和机器人触觉如何通过此类研究继续发展将会很有趣。
-
一种标定陀螺仪的新方法2016-08-17 4288
-
prisma气动执行器资料2008-05-03 1195
-
研究人员创造了一种产生与激光密切相关的超短光脉冲新方法2018-02-08 5315
-
美国提出一种废塑料处理的新方法 可将其转化为锂离子电池的阳极材料2019-02-19 1361
-
深度学习全新打开方式Google Brain提出概念激活向量新方法2019-07-31 3841
-
瑞士研究人员研发出了一种可以躲闪障碍物的无人机2020-03-23 1124
-
研究人员发现一种可在水中产生纳米气泡的新方法2020-04-09 8041
-
马来西亚研究人员提出一种评估光伏模块不同冷却系统有效性的新方法2020-04-17 1242
-
加拿大开发一种将Micro LED转移并粘合到柔性基板上的新方法2020-07-22 1433
-
研究人员开发出用于光子处理器的新方法2021-01-08 2731
-
气动执行器的组成_气动执行器选型2021-01-21 4981
-
研究人员提出利用5G移动网络容量过剩的新方法2021-04-16 1956
-
一种产生激光脉冲的新方法2023-11-20 2371
-
一种产生激光脉冲新方法2023-12-07 1488
-
气动执行器换电动执行器怎么换2024-07-10 4521
全部0条评论

快来发表一下你的评论吧 !
