

蓝牙5.1如何提供微定位?
描述
随着 GPS 的普及,定位已成为无线设备的重要功能之一。如今的消费者期望实现微定位,这反过来促使无线技术针对微定位的要求进行调整,推动定位精度不断提升。
使用无线技术进行定位并不是一件新鲜事。然而,在确定了基于位置的新用例后,用户对定位精度的要求也在逐年提高。
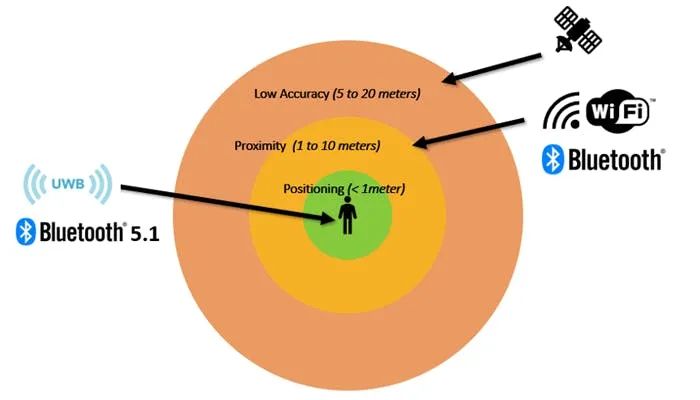
例如,GPS 系统可以达到约 5 到 20 米的精度级别,具体取决于信号条件。对于寻找特定建筑物的车主来说,GPS 系统足以满足需求,但 GPS 的精度水平无法帮助用户在商店中查找特定的货架或在参观博物馆时找到目标画作。
如今,基于接收信号强度的蓝牙和Wi-Fi定位系统可满足室内应用的定位需求,例如检测几米内人或物的接近程度。不过,下一代定位技术旨在实现更高的精度水平,达到几厘米量级的亚米级精度,此类技术也称为微定位。微定位开启了免提访问控制和资产跟踪等众多新一代用例,允许用户以极其精确的方式与环境中的各种物体交互。
基于蓝牙5.1核心规范的系统、基于IEEE 802.15.4z的超宽带和基于IEEE 802.11az的Wi-Fi下一代定位技术让这些新一代的定位应用成为可能。
在超宽带的支持下,蓝牙已经从一种低精度定位技术发展
为误差在一米以内的高精度定位技术。
蓝牙 5.1 如何提供微定位?
蓝牙 SIG 在2019 年发布了全新的蓝牙 5.1核心规范,加入了用于定向的增强功能。早在 5.1 版本发布之前,蓝牙便已广泛应用于室内定位领域,它使用一种称为接收信号强度指示器 (RSSI) 的方法,根据测得的路径损耗来估算发射器和接收器之间的距离。
但是,这种方法只能检测到发射器位于某个圆形区域内,无法获知传入信号的方向。蓝牙 5.1 规范通过提供传入信号的角度信息将方向性纳入考量。通过蓝牙 5.1 的到达角(AoA) 或出发角 (AoD) 方法,可实现资产跟踪系统或寻路应用。
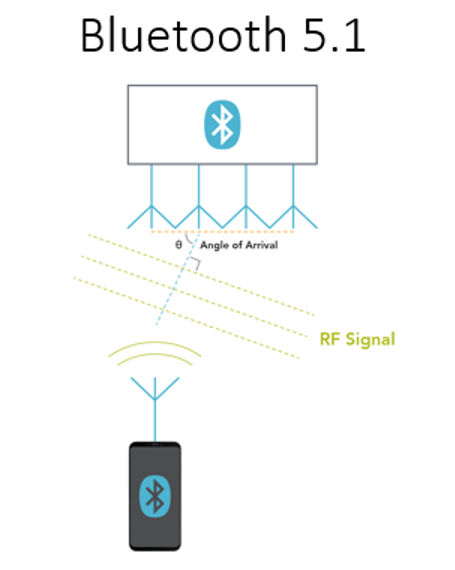
蓝牙定向是通过检测蓝牙设备的到达角实现的。
可根据输入信号的角度确定方向。定向时,蓝牙 5.1 设备会传输带定频扩展信号 (CTE) 栏位的数据包。CTE 字段是持续时间可变的未数据 1 位序列,可简化接收器上的相位计算。蓝牙 5.1 接收器使用具有至少两根天线的天线阵列,并根据天线之间的相位差、信号波长和天线之间的距离计算入射角。
相比单独使用 RSSI 方法,将角度信息与 RSSI 测量相结合能够更准确地确定设备位置。
基于蓝牙 5.1 的系统的定位精度取决于多种因素,包括数组中的天线数和天线方向图,以及根据相位 I/Q 信息确定角度的后处理算法。此外,现场的拓扑结构也十分重要,因为障碍物会降低 RSSI 和相位精度。不过,通过部署多个定位器进行三角测量,可以显著改善测量精度。
基于蓝牙 5.1 的系统能够达到几十厘米量级的亚米级精度,具体取决于实施情况。在本文编写之际,所有主要芯片组制造商均已添加对蓝牙 5.1 的支持。
超宽带(UWB)如何实现微定位?
UWB 并非一项新技术。正如IEEE 802.15.4标准中定义的一样,其首次部署发生在21世纪初。当时,UWB 是一种专为替代 USB 而设计的高速传输技术,但并未实现广泛商用。近年来,出于测距目的,IEEE 802.15.4z修订版本对MAC和PHY层进行了改进。
与蓝牙技术不同的是,UWB 并非使用信号强度,而是使用飞行时间 (ToF) 来估算距离。ToF 衡量的是信号从发射器到接收器所花费的传播时间。由于射频信号在任何环境下均以光速传播,因此基于ToF的距离估算方法比蓝牙中使用的RSSI方法具备更好的环境适应性。
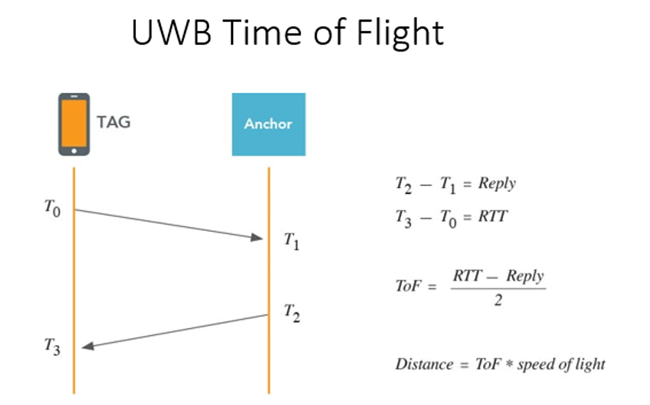
飞行时间可提供距离信息。
UWB 不同于蓝牙和Wi-Fi。UWB 并非使用调制正弦波,而是利用调制脉冲串来传输信息。UWB 脉冲的持续时间非常短,仅有一纳秒左右。考虑到信号的特性,这种技术更能适应室内典型的多路径环境,因为与蓝牙或Wi-Fi相比,UWB的短脉冲更不易受到反射信号的干扰。
UWB 的 ToF 测量可以通过角度信息完善,以提供更精确的定位。类似于上文蓝牙 5.1 AoA 部分所述,UWB 锚点接收器采用具有两根或更多根天线的天线阵列。计算程序使用每根天线的到达时间和天线间隔信息确定传入信号的角度。
基于UWB技术的系统可以达到10厘米级别的精度,具体取决于环境。在本文编写之际,几家主要芯片组制造商均已提供UWB解决方案,几家智能手机制造商也纷纷采用这项技术,这证明了其发展势头十分强劲。
通过Wi-Fi 802.11az进行微定位
接下来要探讨的是最新且口碑最佳的一项技术,即已接近完成(目标是在 2022 年发布)的 Wi-Fi 802.11az 下一代定位 (NGP) 标准。与蓝牙类似,Wi-Fi 长期以来一直与基于 RSSI 的方法一起使用来提供定位。不过,NGP标准建立在一项称为精细定时测量(FTM)的Wi-Fi功能基础之上。
FTM 使用往返时间(RTT)信息来估算启用Wi-Fi的网站和接入点之间的距离。RTT 机制会使用离开时间 (ToD) 和到达时间 (ToA) 的时间戳。802.11az标准旨在利用 802.11ax (Wi-Fi 6) 标准中的最新功能改进传统 FTM。
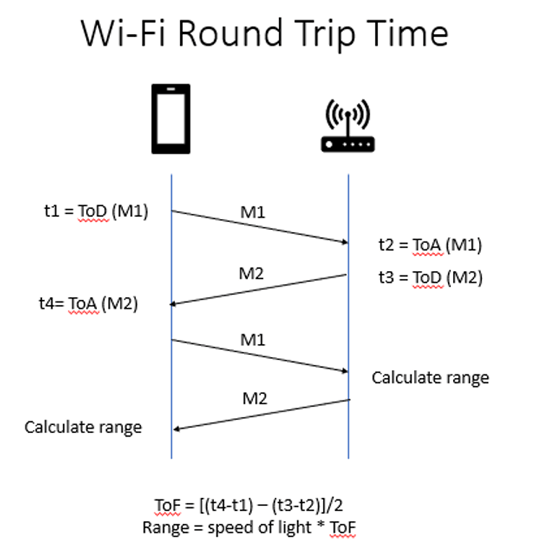
Wi-Fi 精细定时测量功能测量往返时间。
Wi-Fi 6 信号支持高达 160 MHz 的通道带宽,Wi-Fi 7 支持高达 320 MHz 的通道带宽,802.11az 的增强功能利用新一代标准中更宽的通道带宽,有效提高了定位精度。更高的带宽意味着更高的分辨率,而MIMO操作则可更好地应对多路径效应。
为提高协议效率,NGP 会使用 802.11ax 标准中已定义的空数据包 (NDP) 帧进行波束成形探测。此外,新标准还利用了Wi-Fi 6的多用户功能。当将基于触发器的测距与上行链路和下行链路OFDMA结合使用时,接入点可以利用单次传输有效地从多个网站获得测距信息。此功能极大地减少了交换测距信息所需的开销,还提高了对更多网站的可扩展性。
在本文编写之际,与采用802.11az NGP技术的商业定位解决方案相关的数据仍较为有限。然而,高通 Wi-Fi 测距白皮书上发布的测试数据显示,这项技术在视距和非视距环境中的表现均十分出色,精度可达分米级。
下一代微定位技术对比
对比上述三种技术的定位精度时,UWB 的精度最高,可以达到厘米级。基于蓝牙 5.1 的系统可达到亚米级精度,而基于 802.11az 的 Wi-Fi 部署可达到分米级精度。请记住,在讨论定位精度时必须考虑多项因素。环境、系统设计、天线路径延迟和其他参数都可能导致标称精度降低。
除了定位精度之外,还有许多因素会影响用户投资新定位技术的决策,而这些判断标准与技术的应用密切相关。例如,安全性、功耗、成本、现有基础设施、传输范围和互操作性都可能影响决策。
无论选择哪种技术,都需要经过精心的设计验证测试才能确保最佳性能,进而实现成功部署。
审核编辑 :李倩
-
蓝牙1.0到蓝牙信标5.1发展历程:从基础连接到精准定位详解2026-01-04 893
-
蓝牙5.1和5.3有什么区别?2023-12-09 26898
-
灵动微BLE 5.1低功耗蓝牙MCU MM32WB05102023-07-31 1580
-
三种常见的蓝牙定位方案2022-02-17 15144
-
蓝牙定位升级5.1版优点介绍2021-11-09 2385
-
蓝牙5.1厘米级定位主要应用在哪些领域?2021-06-16 1470
-
基于蓝牙5.1技术的室内高精度定位方案正式亮相中国移动合作伙伴大会2019-11-14 5769
-
测向定位成蓝牙5.1最大亮点2019-08-07 6817
-
测向技术纳入5.1版规范 蓝牙定位迈向厘米等级2019-05-16 5004
-
“厘米级”定位的蓝牙5.1核心标准已来,目前有哪些芯片可供选择?2019-04-02 23488
-
蓝牙技术联盟宣布蓝牙 5.1标准正式向开发者开放2019-02-15 6420
-
蓝牙5.1可以帮助开发者将相关设备集成至增强现实体验之中2019-01-29 982
全部0条评论

快来发表一下你的评论吧 !
