

如何使用ESP8266和ArduinoUno设计无线遥控两轮机器人漫游车
描述
该项目展示了如何使用ESP8266和ArduinoUno设计无线遥控两轮机器人漫游车。
本教程展示了如何使用连接到ESP8266Wi-fi模块的ArduinoUno和两个步进电机,通过Wi-Fi网络设计远程控制的两轮机器人漫游车。可以使用HTML设计的界面从普通的互联网浏览器控制机器人。Android智能手机用于将视频和音频从机器人广播到操作员的控制界面。
网上有很多形状、尺寸和价格各异的机器人套件。但是,根据您的应用,它们都不适合,您可能会发现它们对于您的实验来说太昂贵了。或者,也许您只是想制作您的机械结构,而不是购买完整的机械结构。本教程还展示了如何为您自己的机器人项目设计和构建低成本的亚克力框架,对于那些没有的人,只需使用普通工具使用那些昂贵的3D打印机或激光切割机。展示了一个简单的机器人平台。
第1步:工具

构建这个原型需要以下工具:
手锯(用于对亚克力板进行初始切割)
螺丝刀(用于螺栓和螺母的放置)
尺子(尺寸测量用)
美工刀(用于切割亚克力板)
钻孔机(为螺栓钻孔)
砂纸(平滑粗糙的边缘)
第二步:机械结构和材料

要构建定制机器人,首先您必须设计机械结构。这可能很容易,具体取决于您的应用程序,或者充满细节和限制。根据模型的复杂程度,您可能需要在3DCAD软件中对其进行设计或仅在2D中进行绘制。
如果您不想构建自己的机械结构,也可以在线购买完整的结构。网上有很多机器人套件。在这种情况下,您可能会跳到第6步。
在本教程中,我们设计了一个低成本的亚克力框架,用于连接电机和其他组件。本教程中介绍的结构是使用123DDesignCAD软件进行3D设计的。每个零件后来都使用Draftsight软件转换为2D。
使用了以下材料:
2mm亚克力板
42x19mm车轮,带橡胶胎面轮胎(x2)
49x20x32mm钢球万向轮(x1)
M2x10mm螺栓(x12)
M2x1,5mm螺母(x12)
M3x10mm螺栓(x8)
M3x1,5mm螺母(x8)
5/32“x1”螺栓(x3)
5/32“螺母(x6)
手持自拍杆夹
3x3厘米铝制支架(x4)
基地结构的建设分为以下几个步骤:
根据二维图中的尺寸切割亚克力底座;
在二维图中所示位置钻孔;
根据3D图纸使用螺栓和螺母安装组件。
不幸的是,步进电机轴的直径大于轮子上的孔口。因此,您可能需要使用胶水来连接这些组件。在本教程中,我在电机轴和车轮之间临时搭建了一个木制联轴器。
第3步:切割结构
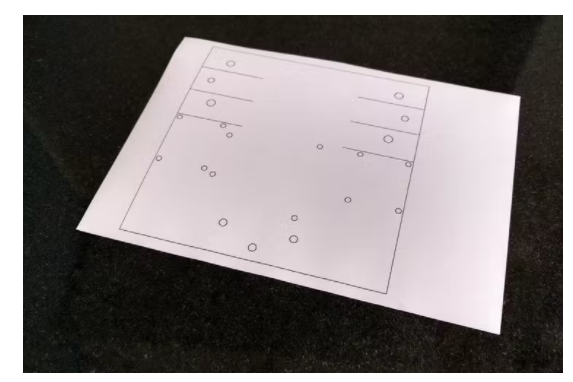
首先,您需要将模型的尺寸转移到亚克力板上。使用普通打印机在不干胶纸上打印您的2D绘图,然后将纸张切割成合适的尺寸并将该遮罩贴在亚克力表面上。
您可以使用手锯根据您的尺寸切割亚克力或使用下面描述的断裂技术。
用美工刀和尺子或刻度尺,沿直线切割亚克力。您不需要一直切割整个片材,只需对其进行评分以创建一些轨道,然后将在该轨道上切割该片材。
将亚克力放在平坦的表面上,用一些夹子将其固定到位并施加一些压力,直到板材断裂成两半。重复此过程,直到完成所有切割。之后,您可以使用砂纸打磨粗糙的边缘。
第4步:钻孔底座
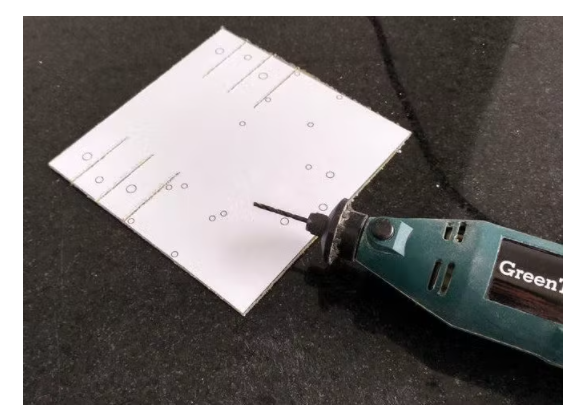
用钻孔机在二维图(面罩中所示)所示位置钻孔。
亚克力相对容易钻孔。因此,如果您不处理钻孔机,则可以使用锋利的工具(如美工刀)手动钻孔。您也可以使用它来扩大小孔以适应螺栓尺寸。
取下面罩,您的底座就准备好了。
第5步:组装结构
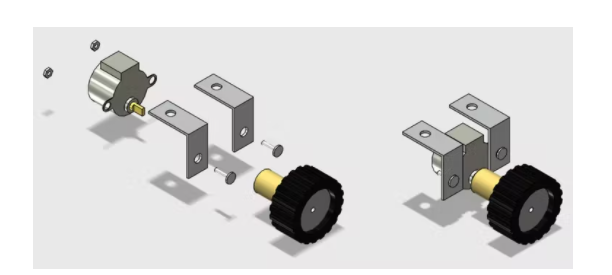
根据图片用螺栓和螺母安装组件,您的结构就准备好了。
M3螺栓用于安装步进电机,而5/32”螺栓用于安装前轮和智能手机夹。
现在,可以开始在以下步骤中组装电路
第6步:电子产品

您将需要以下电子元件:
ArduinoUno
ESP8266
Protoshield或普通面包板
1kohm电阻器(x2)
10kohm电阻(x1)
一些跳线
带ULN2003driver的步进电机(x2)
一台电脑(用于编译和上传Arduino代码)
移动电源
USB电缆
您不需要特定的工具来组装电路。所有组件都可以在您最喜欢的电子商务商店在线找到。该电路由连接到ArduinoUSB端口的移动电源供电。
根据原理图连接所有组件。您需要一些跳线来连接ESP-8266模块和步进电机。您可以使用protoshield(用于更紧凑的电路)、普通面包板,或设计您自己的Arduino扩展板。将USB电缆插入ArduinoUno板并继续下一步。
第7步:Arduino代码
安装最新的ArduinoIDE。在这个项目中stepper.h库用于控制步进电机。与ESP-8266模块通信不需要额外的库。请检查您的ESP8266的波特率并在代码中正确设置。
下载Arduino代码(stepperRobot.ino)并用您的wifi路由器SSID替换XXXXX,用路由器密码替换YYYYY。将Arduino板连接到您的计算机USB端口并上传代码。
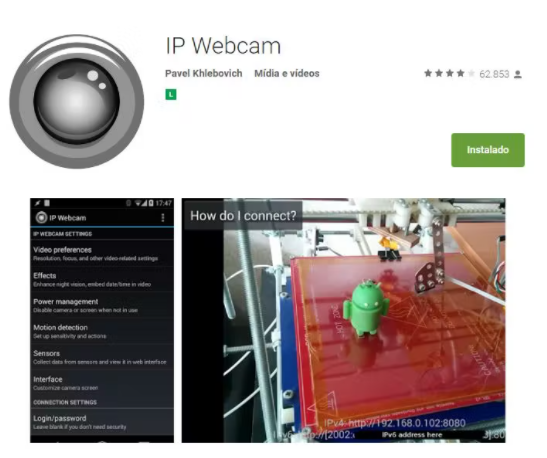
第8步:Android网络摄像头
第9步:将电路放入机器人中
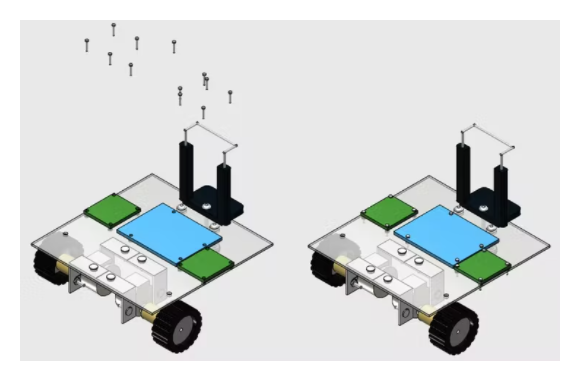
使用一些M1螺栓将电路安装在机器人顶部,如图所示。
之后,使用双面胶带将您的移动电源粘在机器人背面(因为以后很容易取下),然后将您的智能手机放入夹子中。
第10步:基于Web的控制界面
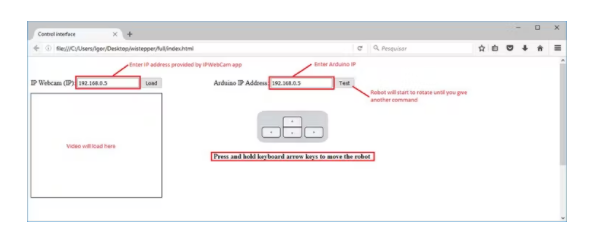
为控制机器人设计了一个html界面。
下载interface.rar并将所有文件解压到指定文件夹。然后在Firefox上打开它。
在该界面中使用文本框形式输入ESP模块和视频/音频服务器(来自AndroidIP网络摄像头应用程序)的IP地址。
有一个测试但是,它将使机器人旋转,直到收到另一个命令。键盘方向键用于向前或向后移动机器人,以及向左或向右旋转。
第11步:使用
当Arduino重新启动时,它会尝试自动连接您的Wi-Fi网络。使用串行监视器检查连接是否成功,并获取路由器分配给ESP-8266的IP。在Internet浏览器(Firefox)中打开html文件并在文本框中告知此IP地址。
您还可以使用其他方法来找出路由器分配给设备的IP地址。
断开ArduinoUno与计算机的连接并将其连接到移动电源。等待它再次连接。
在连接到机器人的智能手机中启动IP网络摄像头应用程序。在您的控制界面上输入视频/音频IP并连接到服务器,您就可以开始使用了。您可能需要降低应用中视频的分辨率,以减少传输期间的延迟。
单击并按住键盘上的箭头按钮以旋转机器人或向前/向后移动机器人,并享受探索环境的乐趣。
-
关于两轮自平衡机器人载重问题2016-11-24 4714
-
全向轮机器人有哪些特性?2021-08-30 1170
-
基于esp8266无线控制模块应用2021-09-01 2102
-
如何利用Python+ESP8266 DIY 一个智能聊天机器人?2022-02-14 2311
-
esp8266无线串口模块分析介绍2017-11-03 14490
-
最简单DIY基于ESP8266的物联网智能小车②(webserver服务器网页高级遥控版)2021-12-29 2006
-
使用ESP8266-01制作WIFI遥控小车(一)2022-01-12 3166
-
Wifi控制的FPV Rover机器人(带有Arduino和ESP8266)2022-11-18 926
-
带有ESP8266的电报机器人2022-11-21 884
-
基于ESP8266的WiFi车2022-12-08 1188
-
基于ESP8266的电报机器人2022-12-21 891
-
ESP8266初次如何实现无线通信(基于电脑与ESP8266)2023-05-30 1430
-
使用Arduino制作两轮机器人2023-06-19 1139
-
ESP8266由游戏手柄控制的汽车机器人2023-07-03 1237
-
ESP8266 太空人动画的 OLED 显示2024-10-08 1346
全部0条评论

快来发表一下你的评论吧 !
