

MEMS器件的低成本微惯性导航系统设计
嵌入式设计应用
描述
设计了一款基于MEMS陀螺和MEMS加速度计的低成本微惯性导航系统。采用“四元数”法进行姿态计算,通过比力变换、积分运算确定栽体的速度、位置。分析样机运行结果可知,静态运行15 s,姿态误差最大为1.2°,速度误差最大为4.5 m/s,位置误差最大为33 m。实验表明,该系统发散较快,但短期精度较高,为满足长时间导航,必须与其他导航如GPS组合,即可应用到普通导航领域,且能大大降低系统的成本和体积。
关键词:微惯性导航系统;预处理;捷联解算;MEMS陀螺
与传统的惯性导航系统相比,由MEMS陀螺和MEMS加速度计构成的微惯性导航系统在成本、体积、重量等方面均具有显著优势,在飞机、导弹和舰船等军事及民用领域均具有广阔的应用前景。由于技术水平的局限,现今基于MEMS技术的微陀螺精度还不是很高,与光纤陀螺还有数量级的差距,但价格与之相比却非常低。MEMS加速度计是所有MEMS传感器中商业化应用最成功的,精度上已经能够满足军事应用要求。在此使用目前市场上的MEMS加速度计和低精度 MEMS陀螺来设计低成本微惯性导航系统,可用于对精度要求不高,但对成本比较敏感的领域,如小型无人机等。
1 微惯性导航系统硬件设计
设计的微惯性导航系统硬件主要包括MEMS惯性传感器及信号调理模块、信号采集处理与传输模块、导航计算机及显示模块。其结构框图如图1所示。微惯性传感器是惯性导航系统的核心敏感器件,其误差是导航系统的主要误差来源,其精度直接决定了导航的精度。

选择ADI公司的ADuC842单片机,该单片机主频可达16.67 MHz,片上自带8路12位A/D,可用于温度传感器信号的采集,并完成陀螺和加速度计信号的读取、预处理以及温漂补偿等操作,最终通过RS 232与导航计算机通信。
1.1 微惯性传感器模块
MEMS惯性传感器模块中的三轴陀螺由ADI公司3个单轴MEMS角速度传感器ADXRS150组成,其角速度范围为150°/s;三轴加速度计采用 ADI公司的MEMS加速度传感器ADXL103和ADXL203组成,其中ADXL103是单轴加速度传感器,ADXL203是单芯片双轴加速度传感器,将其正交放置组成三轴加速度计来测量运行载体沿其正交轴方向的线加速度。所选陀螺及加速度计均采用微机械技术,性能优越、价格低廉,具有较高的性价比。根据惯性传感器信号特点及A/D输入范围,系统的信号调理模块主要包括信号的放大和低通滤波处理。选择具有高精度、零漂移、轨对轨特点的运算放大器作为信号放大及缓冲器来满足设计需要;陀螺性能好坏主要取决于陀螺漂移,而陀螺噪声是引起陀螺漂移的一个重要因素,在此设计的陀螺工作带宽在40 Hz,设计中增加了低通滤波器电路,以滤除40 Hz以外的干扰噪声。
1.2 信号采集处理与传输模块
根据惯性传感器特性,在留有余度的基础上选用16位高精度A/D采集芯片ADS8344,其8个通道循环采样,转换速率可调且最大为100 kHz,采用SPI接口与CPU通信。考虑运算速度及方便使用,CPU选择ADI公司的ADuC842单片机,该单片机主频可达16.67 MHz,片上自带8路12位A/D,可用于温度传感器信号的采集,并完成陀螺和加速度计信号的读取、预处理以及温漂补偿等操作,最终通过RS 232与导航计算机通信。
1.3 导航计算机
捷联式惯性导航算法非常复杂,运算量很大,需建立“数学平台”以代替平台惯导的机械平台。为满足系统的实时性要求,选择***昭营科技的主频1.2 GHz,内存512 MB的嵌入式小型计算机eBox4850作为导航计算机,可以很好地满足要求。
2 信号预处理
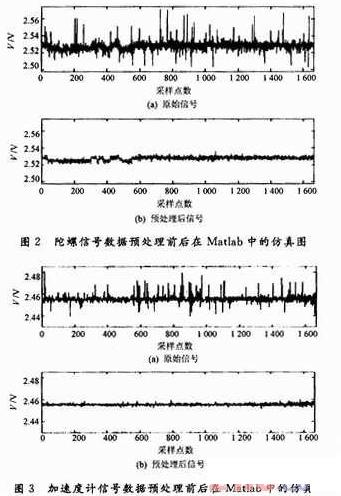
微惯性传感器,尤其是微陀螺技术目前还不是很成熟,低成本的MIMU在性能和精度上都存在较大的缺陷,野值比较明显,噪声水平也比较高。利用先前已在MEMS陀螺降噪方面所做的工作,在此先在单片机中对信号做预处理,再利用降噪算法在导航计算机中进行陀螺降噪,最后完成导航解算,以获得较好的处理效果。考虑单片机系统的处理能力及实时性,本文采用均值滤波算法做预处理,即对每组采集的7个数据,首先去除最大值x(1)和最小值x(7),剩余数据记为x(2),x(3),x(4),x(5),x(6);然后将x(2),x(3)的均值,x(3),x(4),x(5)的均值,x(5),x(6)的均值再平均后作为预处理后的输出数据。
目前已经广泛应用到众多导航设备中。姿态更新计算是捷联式惯导的关键算法,主要有欧拉角法、方向余弦法和四元数法。其中四元数法具有计算量小、精度高、可避免奇异性等优点,本文采用此方法作为姿态更新算法。图2、图3为陀螺及加速度计静态信号在数据预处理前后在Matlab中的仿真图,由图可见,均值滤波预处理算法效果较好,其中的奇异值基本消除。
3 捷联解算(SINS)
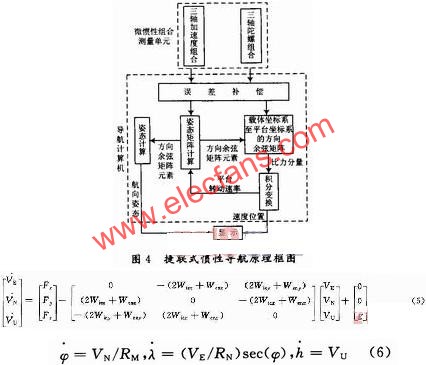
在此设计的捷联式惯性导航系统工作原理图如图4所示。将MEMS陀螺和MEMS加速度计直接固联在运载体上,通过导航计算机依靠算法建立导航坐标系,即平台坐标系以数学平台形式存在,省略了复杂的物理平台,具有结构简单、体积小、重量轻、成本低等优点。
3.1 姿态矩阵
设导航坐标系为n,运载体坐标系为b,俯仰角δ、横滚角θ、航向角φ,由导航坐标系至运载体坐标系的姿态变化矩阵为:

3.2 四元数即时修正及归一化
设载体坐标系相对导航坐标系的转动四元数为公式(1),其中Wx、Wy、Wz为经过补偿后的3轴捷联MEMS陀螺输出。

在更新过程中,由于存在计算误差,姿态矩阵成为非正交阵,因此需要正交化处理以消除非正交引起的算法误差,处理方法为用式(3)中的替换Q中的相应qi即可。

3.3 姿态矩阵的计算
经过式(2),式(3)实时计算出四元数后,由对姿态矩阵更新计算,再通过即可获得载体更新的姿态角。

3.4 速度位置的计算
加速度测量的比力信息fx,fy,fz,通过姿态矩阵转化到导航坐标系后记为Fx,Fy,Fz,转换由式(4)确定。东北天方向的速度VE,VN,VU由对加速度做积分运算确定,经度λ、纬度φ高度h由对速度做积分运算确定,分别见公式(5),式(6)。

4 实验结果及分析
为了测定所设计的低成本捷联式惯性导航系统的性能和精度,进行了大量的实验室静态测试,图5,图6,图7为原理样机实时运行20 s的静态测试结果。由图可知,样机静态运行15 s,姿态误差最大为1.2°,速度误差最大为4.5 m/s,位置误差最大为33 m。分析实验结
果可知,样机运行在较短时间内,捷联解算结果良好。但是长时间运行,误差发散比较严重,主要原因有2个,其一是考虑低成本设计,所选用的MEMS惯性传感器精度比较低,与普通导航所用的惯性传感器精度有数量级的差距;其二,选用的导航方式为捷联式惯性导航,而捷联式系统为发散系统,本身误差有积累效应,时间越长误差越大。



5 结语
在此首先介绍了采用MEMS惯性传感器设计的微惯性测量单元。由于选用的微惯性传感器精度比较低,信号存在较大的噪声,个别点出现野值现象,所以引入信号预处理。根据陀螺及加速度计测量的实时信息,通过“四元数”法,完成导航解算,输出运载体的航向速度及位置信息。分析实验结果可知,此系统短期精度较高,但误差随时间发散非常快,为保证长时间使用,可以采用SINS/GPS组合导航方式,通过卡尔曼滤波来抑制发散,提供测量精度,这也是我们以后工作的重点。
-
捷联式惯性导航系统2016-08-17 3156
-
MEMS惯性传感器的测试及应用领域2020-05-18 6070
-
详解GPS导航系统中的惯性技术2020-06-13 4296
-
小车惯性导航系统设计原理分析2020-06-14 3749
-
求一款轮式小车惯性导航系统的设计方案2021-04-19 2255
-
怎么选择低成本汽车导航系统?2021-05-13 1286
-
VxWorks在惯性导航系统中的应用2009-03-29 596
-
低成本GPS/SINS组合导航系统的设计及实现方案2009-08-10 1447
-
基于GPS/MEMS微惯性导航系统的滤波混合校正2018-02-01 1252
-
基于FPGA的惯性导航系统设计2018-03-04 3647
-
惯性导航的工作原理及惯性导航系统分类2018-05-10 37770
-
MEMS惯性传感器的研究背景与发展现状2023-07-19 3806
-
组合导航系统中的惯性导航系统是什么?2025-06-18 1116
-
这款MEMS组合导航系统如何做到60秒高精度导航?2025-07-07 1264
-
MEMS组合导航如何实现超低成本?2025-10-23 263
全部0条评论

快来发表一下你的评论吧 !
