

 红外线简介 美的空调红外遥控器协议R05D说明
红外线简介 美的空调红外遥控器协议R05D说明
描述
1.红外线简介
在光谱中波长自760nm至400um的电磁波称为红外线,它是一种不可见光。目前几乎所有的视频和音频设备都可以通过红外遥控的方式进行遥控,比如电视机、空调、影碟机等,都可以见到红外遥控的影子。这种技术应用广泛,相应的应用器件都十分廉价,因此红外遥控是我们日常设备控制的理想方式。
2.美的空调红外遥控器协议R05D
美的空调红外遥控器采用R05D格式,载波频率为38KHZ。
数据格式:引导码+48位数据+分隔码+48位数据(LAA’BB’CC’ S LAA’BB’CC’)
L为引导码;
ABC为实际数据,A’为A的反码,B’为B的反码,C’为C的反码;
S为分隔码;
第二帧数据和第一帧一样;
L引导码:4.5ms低电平+4.5ms高电平(以解析方分析,编码方刚好相反,下面不再概述)

数据A:A为识别码(A=10110010=0xB2,预留方案时A=10110111=0xB7)
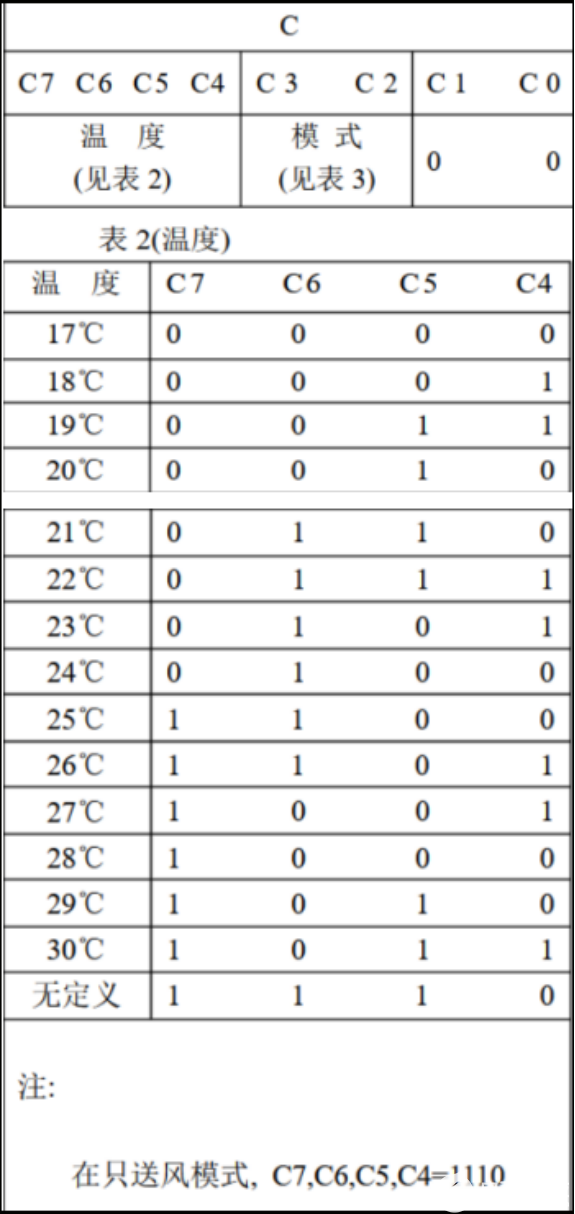
数据B

数据C
关机键值
关机为固定编码键值:
A=1011 0010 --0xB2
B=0111 1011 --0x7B
C=1110 0000 --0xE0
数据0格式

数据1格式

分隔码

完整时序图

3.软件设计
本次采用外部中断+定时器方式完成红外数据解析。
1.红外数据解析程序
/*********红外线初始化************
**
**REMOTE_IN --PB9
**
***********************************/
void HS0038_Init(void)
{
RCC->APB2ENR|=1<<3;//PB
GPIOB->CRH&=0xFFFFFF0F;
GPIOB->CRH|=0x00000080;
EXTI_Config(GPIO_B,9,EXTI_FTSR);//下将沿触发
STM32_NVIC_SetPriority(EXTI9_5_IRQn,0,0);//设置优先级
TIMx_Init(TIM1,72,65535);//定时器1初始化
}
/*************获取高电平时间****************/
u16 Infrared_GetTimeH(void)
{
TIM1->CNT=0;//清空计数器值
TIM1->CR1|=1<<0;
while(REMOTE_IN);//等待引脚拉低
TIM1->CR1&=~(1<<0);
return TIM1->CNT;
}
/******************获取低电平时间**************/
u16 Infrared_GetTimeL(void)
{
TIM1->CNT=0;//清空计数器值
TIM1->CR1|=1<<0;
while(REMOTE_IN==0);//等待引脚拉高
TIM1->CR1&=~(1<<0);
return TIM1->CNT;
}
//美的空调17~30℃数据顺序排放
const char r05d_temp[15]={0,1,3,2,6,7,5,4,12,13,9,8,10,11,14};//温度数据,17~30
u32 infrared_data=0;//保存解析的32位数据
u8 infrared_stat=0;//解析成功标志位
u8 infrared_buff[6]={0};
/*******EXTI5~9中断服务函数**********/
void EXTI9_5_IRQHandler(void)
{
u16 time;
u8 i=0,j=0;
EXTI->PR|=1<<9;//清除标志位
/*1.接收引导码:4.5ms低电平+4.5ms高电平*/
time=Infrared_GetTimeL();
if(time<=3500 || time>=5500)return;
time=Infrared_GetTimeH();
if(time<3500 || time>5500)return ;
for(i=0;i<6;i++)
{
for(j=0;j<8;j++)
{
time=Infrared_GetTimeL();//间隔码:540us低电平
if(time<350 || time>650)return ;
time=Infrared_GetTimeH();
if(time>=1550 && time<=1850)
{
infrared_buff[i]<<=1;
infrared_buff[i]|=0x01;
}
else if(time>=420 && time<=700)
{
infrared_buff[i]<<=1;
}
else return ;
}
}
infrared_stat=1;//数据解析完成
}
2.主函数
int main()
{
u8 i=0;
u8 wind;
u8 mode;
u8 temp;
Beep_Init();
Led_Init();
Key_Init();
u8 data[6];
Usartx_Init(USART1,115200,72);
HS0038_Init();
while(1)
{
if(infrared_stat==1)
{
BEEP=1;
Delay_Ms(50);
BEEP=0;
for(i=0;i<6;i++)
{
if(data[i]!=infrared_buff[i])break;
}
if(i!=6)
{
for(i=0;i<6;i++)
{
data[i]=infrared_buff[i];
}
//printf("data:%#xrn",infrared_data);
if(data[2]==0x7B && data[4]==0xE0)
{
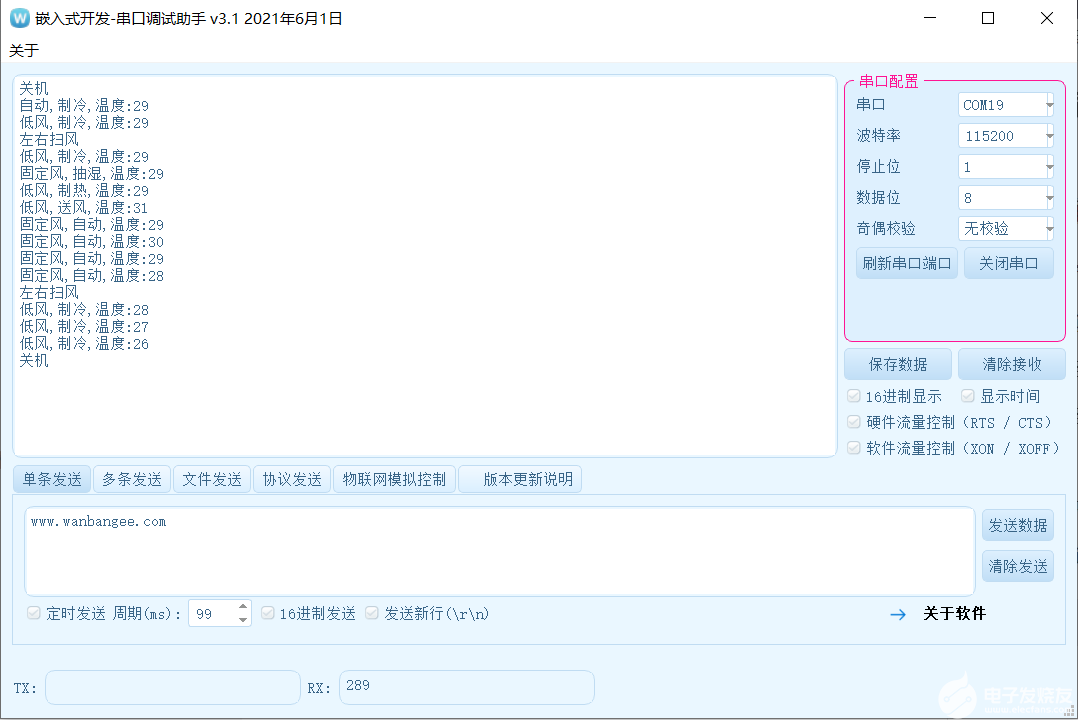
printf("关机rn");
}
else if(data[2]==0x6b && data[4]==0xE0)
{
printf("左右扫风rn");
}
else if(data[0]==0xb5 && data[2]==0xf5)//其它
{
}
else
{
wind=(data[2]>>5)&0x7;//风速
mode=(data[4]>>2)&0x3;//模式
temp=(data[4]>>4)&0xf;//温度
//printf("风速:%drn",wind);
//printf("模式:%drn",mode);
//printf("温度:%#xrn",temp);
if(wind==WIND_1)printf("自动,");
else if(wind==WIND_2)printf("低风,");
else if(wind==WIND_3)printf("中风,");
else if(wind==WIND_4)printf("高风,");
else if(wind==WIND_5)printf("固定风,");
if(mode==MODE_1)printf("自动,");
else if(mode==MODE_2)printf("制冷,");
else if(mode==MODE_3 && temp==T_31)printf("送风,");
else if(mode==MODE_3)printf("抽湿,");
else if(MODE_4)printf("制热,");
for(i=0;i<15;i++)
{
if(temp==r05d_temp[i])printf("温度:%drn",17+i);
}
}
}
infrared_stat=0;
}
}
}

审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
评论(0)
发评论
-
 PCB77542177
2024-07-22
0 回复 举报大佬,没找到表3 呀 收起回复
PCB77542177
2024-07-22
0 回复 举报大佬,没找到表3 呀 收起回复
-
如何提高红外线发射管在遥控器上的发射距离2024-01-31 8361
-
红外线遥控器使用方法2023-12-20 13336
-
使用红外线遥控器可以随时打开电视2022-12-23 1795
-
红外遥控器协议R05D具有哪些特性参数?2022-02-15 2534
-
【STM32】R05D电控红外协议的美的空调遥控器2021-12-17 3189
-
红外线遥控器原理及编程 精选资料分享2021-07-21 2293
-
红外线的基本特性有哪些2021-02-13 44591
-
自制电脑红外线遥控器的详细资料说明2019-11-28 2013
-
想用stm32发射红外线控制寝室空调,但是不知道奥克斯空调遥控器 YKR-H/112 发出的红外线编码格式,有大神可以知道吗?2018-01-03 9817
-
红外线遥控器电路原理图2017-02-08 3351
-
PC红外线遥控器2015-12-10 1691
-
红外线遥控器解码程序2010-02-02 3785
全部0条评论

快来发表一下你的评论吧 !
