

基于AI的实时感知提升自动代客泊车功能
描述
这是 NVIDIA DRIVE Labs 系列 中的最新视频。这些视频以工程为重点,介绍了各个自主车辆的挑战以及 NVIDIA 驱动团队如何应对这些挑战。
自动停车涉及一系列复杂的感知和决策算法,传统上依赖高清( HD )地图来检索停车信息。
然而,地图覆盖率和较差或过时的本地化信息可能会限制此类系统。除此之外,系统还必须理解和解释不同地区的停车规则。
在这个 DRIVE Labs 的帖子中,我们展示了基于 AI 的实时感知如何帮助将自动停车扩展到全球各个地区。
自动泊车系统概述
对停车规则的理解和解释可能会比表面上看起来更加微妙。
可以覆盖有效区域内的不同停车规则。例如,“禁止停车”可以覆盖“禁止泊车”
此外,非停车相关标志可以推断停车规则。例如,在德国,任何公共汽车站标志 15 米范围内都不允许停车。在美国,停车标志前 30 英尺内停车是违法的。
最后,除了像物理标志这样的明确线索外,还有携带停车信息的隐含标志。例如,在许多地区,交叉口表示上一个活动停车规则的结束。
基于高级算法的停车标志辅助( PSA )系统对于自动车辆了解停车规则的复杂性并做出相应反应至关重要。
传统的 PSA 系统仅依赖高清地图的输入。然而, NVIDIA DRIVE AV 软件堆栈利用最先进的深度神经网络( DNN )和计算机视觉算法来提高真实场景中自动停车的覆盖率和鲁棒性。这些技术可以实时检测、跟踪和分类各种停车交通标志和道路交叉口。
WaitNet DNN 检测交通标志和十字路口。
wait perception 堆栈跟踪单个标志和交点,通过三角测量提供 3D 位置。
SignNet DNN 标识交通标志类型。
然后,来自模块的结果被输入 PSA 系统,该系统使用这些数据来确定汽车是否在停车带内,限制条件是什么,以及汽车是否允许在该区域内停车或停车。
停车标志辅助系统概述
PSA 系统接收到检测到的停车标志和道路交叉口后,将对象抽象为一个 启动停车标志 或 终点停车标志 。这种抽象级别允许系统在全球范围内扩展。
启动停车标志 标志着新停车带的潜在开始, 终点停车标志 可能会关闭一个或多个现有停车带。图 1 和图 2 显示了停车带是如何形成的。
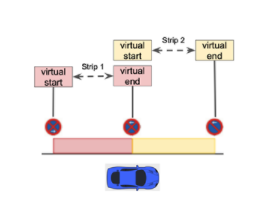
图 1 :形成停车带
图 1 将标志和道路交叉口抽象为停车带。该图显示,单个标志可以生成多个虚拟标志。例如,中间的符号作为最左边符号的“结束”符号,作为最右边符号的“开始”。
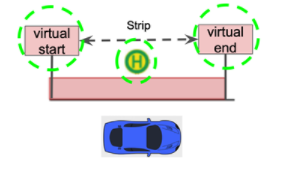
图 2 :禁止停车区旁的汽车。
除了形成停车带外, PSA 系统还利用标志的语义将停车带分为禁止停车、禁止停留、允许停车和未知状态。然后,可以将此信息提供给驾驶员或任何自动停车系统。
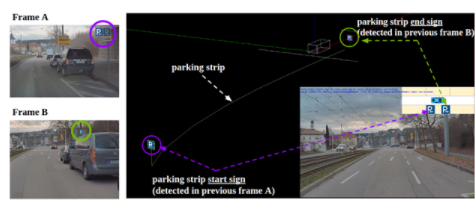
图 3 :PSA 的高水平工作
图 3 显示了 PSA 系统的主要功能工作流。在帧 A 中,检测到“停车区开始”标志,并创建新的停车带。汽车行驶一段时间后,检测到“停车区结束”标志,该标志与该停车带的开始标志相匹配。
最后, PSA 系统将所有激活的停车带存储在其存储器中,并根据停车带所隐含的交通规则向驾驶员发出当前停车状态的信号。
结论
PSA 系统在 NVIDIA DRIVE AGX 上运行仅几毫秒,就可以以惊人的准确性实现复杂的决策。它还兼容任何使用实时摄像头传感器输入的仅感知自动车辆堆栈。
我们目前的 SignNet DNN 支持欧洲 20 多个停车标志,包括公共汽车停车标志、禁止停车标志和禁止停车标志,覆盖范围不断扩大。我们还将光学字符识别( OCR )和自然语言处理( NLP )模块添加到系统中,以处理符号上书写文本携带的复杂信息。
关于作者
邹珂轩是 NVIDIA 自主车辆感知团队的计算机视觉工程师。他目前正在开发动态和静态对象的多摄像头跟踪。过去,他是基于实时感知的等待条件系统(包括速度辅助系统和停车标志辅助系统)各种功能和算法的核心贡献者之一。克劳斯在伊利诺伊大学香槟分校获得计算机工程硕士学位。
Maroof Mohammed Farooq 是 NVIDIA 的高级软件工程师。他是自动车辆感知团队的成员,在该团队中,他致力于开发动态和静态障碍物的摄像头对象跟踪器。过去,他为路径感知、路标识别和等待条件系统的基于 AI 的解决方案的设计和开发做出了贡献。他在南加州大学完成了信号处理硕士学位。
窦航是 NVIDIA 自主车辆感知团队的技术负责人和工程师经理。他领导了等待条件系统(道路规则、标志、灯光、交叉口区域、路标等的语义理解)的开发,目前正在领导开发动态对象(车辆、行人等)和静态对象(自由驾驶空间等)的通用摄像头跟踪。Hang在圣路易斯华盛顿大学获得了计算机科学博士学位,由Ju教授指导。Hang的工作领域包括计算机图形学、计算机视觉和深度学习,尤其对几何、渲染、检测和分类感兴趣。
审核编辑:郭婷
-
自动泊车辅助系统介绍2020-12-15 3254
-
从自主代客泊车解读我来自动驾驶的发展2018-05-26 11289
-
博世携手戴姆勒在中国首次亮相代客泊车技术2018-09-18 3828
-
探索戴姆勒和博世自动代客泊车背后的秘密2018-09-20 20249
-
自动代客泊车是奔驰在自动驾驶技术领域的一部分2018-10-10 1498
-
禾多科技泊车产品完成A轮融资 智能代客泊车技术已经悄然来到战场2018-12-24 2559
-
Stanley Robotics推出“代客泊车机器人”,于法国里昂机场开测2019-03-19 4045
-
JAC-AP全自动泊车介绍2019-08-08 3314
-
美国推出首个基于场端的自动代客泊车解决方案2020-08-30 3481
-
威马借着与百度合作,要抢先落地AVP代客泊车功能2020-10-23 1620
-
韩国CONTROLWORKS发布了首个基于5G移动通信的L4级自动代客泊车方案2020-12-23 2996
-
自动泊车和遥控泊车的区别2024-01-31 3899
-
智界S7将于六月全球首发自动泊车与召唤VPD商用功能2024-05-09 1617
-
智驾仿真测试实战之自动泊车HiL仿真测试2024-10-10 4183
全部0条评论

快来发表一下你的评论吧 !
