

 实时操作系统FreeRTOS移植教程
实时操作系统FreeRTOS移植教程
描述
1.FreeRTOS简介
Free 即免费的,RTOS 全称是 Real Time Operating System,中文就是实时操作系统。注意,RTOS 不是指某一个确定的系统,而是指一类系统。比如 uC/OS,FreeRTOS,RTX,RT-Thread 等这些都是 RTOS 类操作系统。
FreeRTOS 是 RTOS 系统的一种,FreeRTOS 十分的小巧,可以在资源有限的微控制器中运行,当然,FreeRTOS 不仅局限于在微控制器中使用。但从文件数量上来看 FreeRTOS 要比uC/OSII 和 uC/OSIII 小的多。
FreeRTOS特点
- FreeRTOS 的内核支持抢占式,合作式和时间片调度。
- 提供了一个用于低功耗的 Tickless 模式。
- 系统的组件在创建时可以选择动态或者静态的 RAM,比如任务、消息队列、信号量、软件定时器等等。
- FreeRTOS 系统简单、小巧、易用,通常情况下内核占用 4k-9k 字节的空间。
- 高可移植性,代码主要 C 语言编写。
- 高效的软件定时器、强大的跟踪执行功能、堆栈溢出检测功能。
- 任务数量不限。
FreeRTOS源码下载:FreeTOS源码下载地址
2.FreeRTOS移植
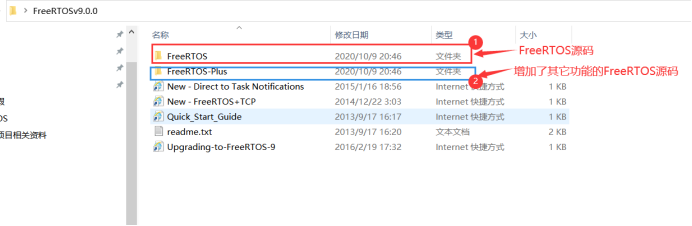
1.打开下载好的FreeRTOS文件夹,我们发现会有两个FreeRTOS的文件夹,我们这里以最基本的源码作为移植示例。
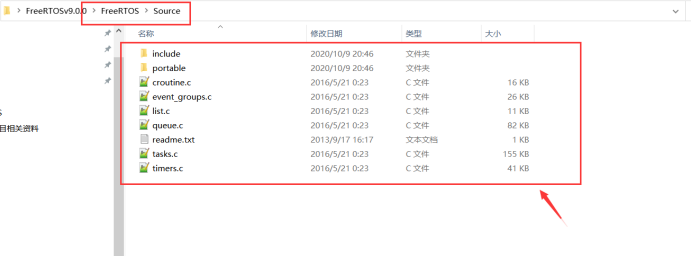
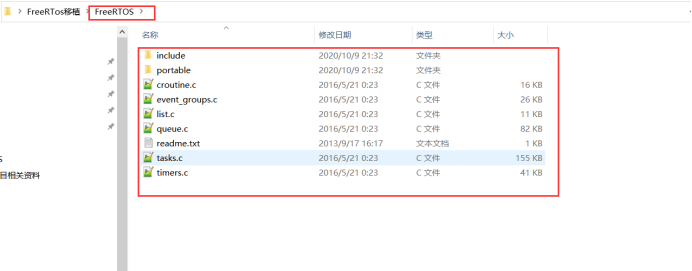
2.打开FreeRTOS/Source,此文件夹中保存的即为FreeRTOS源码,接下来我们找一个简洁的工程移植FreeRTOS系统。将Source复制到我们要移植的工程中。
3.在要移植的工程中创建FreeRTOS文件夹。
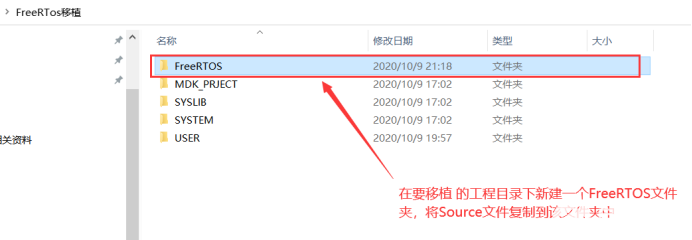
4.将源码复位到该文件夹中。
5.删除不需要的文件:在portable中只保留下面两个文件夹即可。
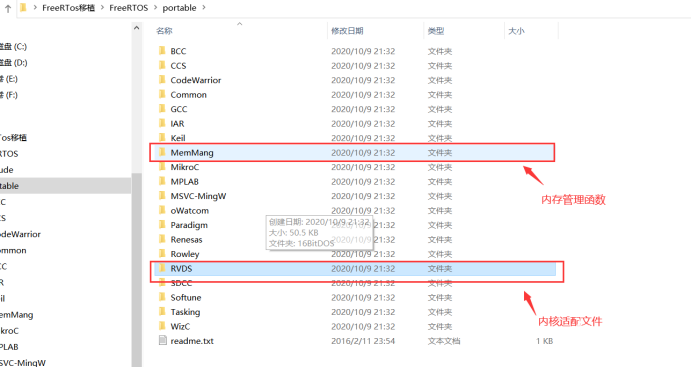
RVDS中只保留ARM_CM3文件

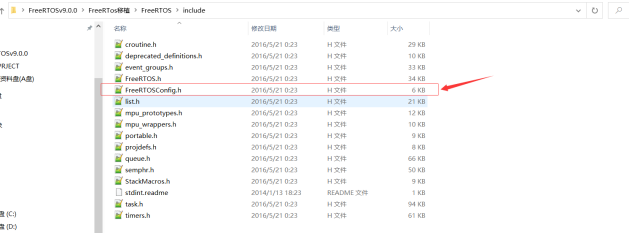
6.打开工程,添加.c文件到工程中,添加头文件路径。
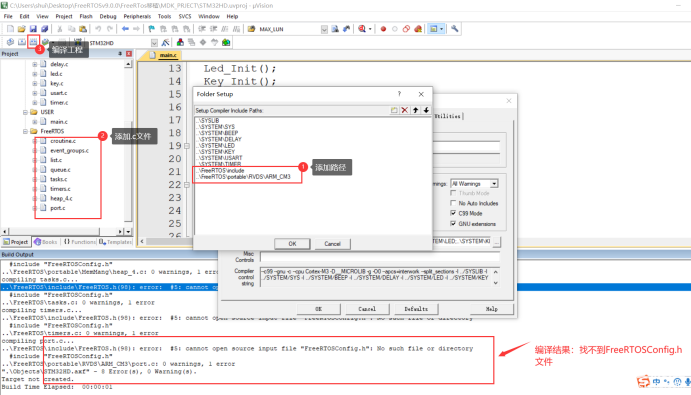
在官方的参考例程里面我们发现有这个,将这个文件拷贝到我们要移植的工程下。
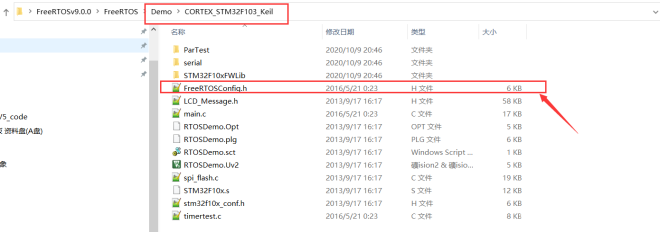
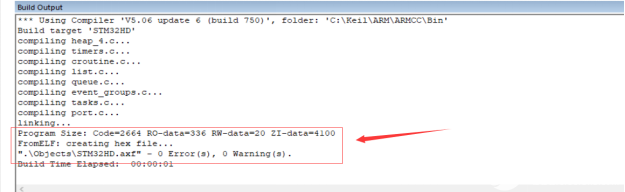
存放路径可以随便选择,只要在KEIL中添加好相应路径即可。重新编译工程。
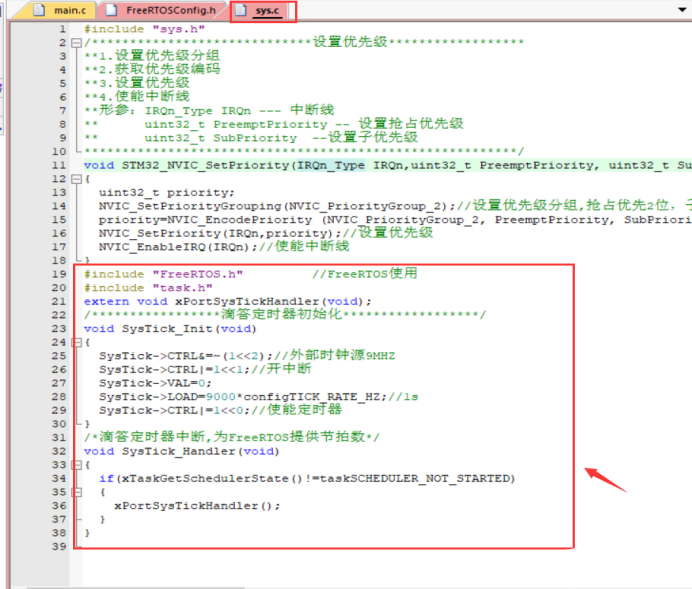
7.提供系统心跳值函数。
#include "FreeRTOS.h" //FreeRTOS使用
#include "task.h"
extern void xPortSysTickHandler(void);
/*****************滴答定时器初始化******************/
void SysTick_Init(void)
{
SysTick->CTRL&=~(1<<2);//外部时钟源9MHZ
SysTick->CTRL|=1<<1;//开中断
SysTick->VAL=0;
SysTick->LOAD=9000*configTICK_RATE_HZ;//1s
SysTick->CTRL|=1<<0;//使能定时器
}
/*滴答定时器中断,为FreeRTOS提供节拍数*/
void SysTick_Handler(void)
{
if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)
{
xPortSysTickHandler();
}
}
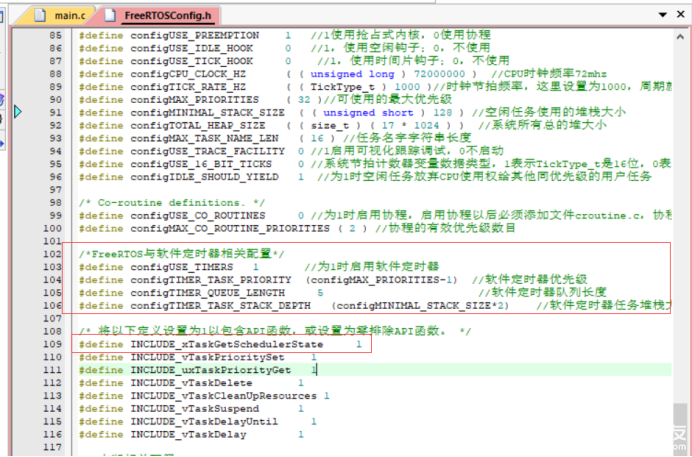
在FreeRTOSconfig.h中设置相应的宏
/*FreeRTOS与软件定时器相关配置*/
#define configUSE_TIMERS 1 //为1时启用软件定时器
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1) //软件定时器优先级
#define configTIMER_QUEUE_LENGTH 5 //软件定时器队列长度
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2) //软件定时器任务堆栈大小
#define INCLUDE_xTaskGetSchedulerState 1
8.延时函数修改
(1)可以直接调用FreeRTOS中提供的延时函数,不过调用该函数会在延时时会进行任务切换,若不想在延时中进行任务切换,则可调用下面的模拟延时函数。通过设置宏FreeRTOS_OS。
/**************微妙延时函数*************/
void Delay_Us(int time)
{
#ifdef FreeRTOS_OS
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=time*9; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
}
#else
int i,j;
for(i=0;i
(2)微妙延时函数
/**************微妙延时函数*************/
void Delay_Us(int time)
{
#ifdef FreeRTOS_OS
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=time*9; //需要的节拍数
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
}
#else
int i,j;
for(i=0;i
9.任务设置模板
#define START_TASK_PRIO 1 //任务优先级
#define START_STK_SIZE 128 //任务堆栈大小
TaskHandle_t StartTask_Handler; //任务句柄
void start_task(void *pvParameters);//任务函数
#define LED0_TASK_PRIO 3 //任务优先级
#define LED0_STK_SIZE 50 //任务堆栈大小
TaskHandle_t LED0Task_Handler; //任务句柄
void LED0_task(void); //任务函数
#define key_TASK_PRIO 2 //任务优先级
#define key_STK_SIZE 50 //任务堆栈大小
TaskHandle_t keyTask_Handler; //任务句柄
void key_task(void); //任务函数
int main()
{
SysTick_Init();
Beep_Init();
Led_Init();
Key_Init();
Usartx_Init(USART1,115200,72);
TIMx_Init(TIM2,72,20*1000);
printf("USART1初始化完成\r\n");
//创建任务
xTaskCreate( (TaskFunction_t)start_task,//任务函数
(const char *)"start_task",//任务名称
(uint16_t)START_STK_SIZE,//堆栈大小
NULL, //传递给任务函数的参数
(UBaseType_t)START_TASK_PRIO,//任务优先级
(TaskHandle_t *)&StartTask_Handler);//任务句柄
vTaskStartScheduler(); //开启任务调度
}
10.任务函数
/*开始任务函数*/
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建LED0任务
xTaskCreate( (TaskFunction_t )LED0_task,//任务函数
(const char *)"start_task",//任务名称
(uint16_t)LED0_STK_SIZE,//堆栈大小
NULL, //传递给任务函数的参数
(UBaseType_t )LED0_TASK_PRIO,//任务优先级
(TaskHandle_t *)&LED0Task_Handler);//任务句柄
xTaskCreate( (TaskFunction_t )key_task,//任务函数
(const char *)"KEYt_task",//任务名称
(uint16_t )key_STK_SIZE,//堆栈大小
NULL, //传递给任务函数的参数
(UBaseType_t )key_TASK_PRIO,//任务优先级
(TaskHandle_t *)&keyTask_Handler);//任务句柄
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
11.任务执行
void LED0_task(void)
{
while(1)
{
LED1=!LED1;
vTaskDelay(500);
}
}
void key_task(void)//任务函数
{
u8 key=0;
while(1)
{
key=Key_Scan();
if(key)
{
printf("key=%d\n",key);
}
vTaskDelay(10);
}
}
-
FreeRTOS实时操作系统简述2023-09-19 3070
-
FreeRTOS:一个迷你的实时操作系统内核2023-06-29 2263
-
FreeRTOS操作系统移植文件2022-08-28 839
-
嵌入式实时操作系统FreeRTOS基本概述2022-02-16 1589
-
FreeRTOS实时操作系统是如何进行移植的呢2021-10-27 1706
-
嵌入式操作系统FreeRTOS的原理与移植实现2021-08-04 2232
-
嵌入式操作系统FREERTOS的移植.2021-07-30 1613
-
STM32芯片移植FreeRTOS操作系统的教程2021-03-29 1783
-
SDCC编译器和FreeRTOS实时操作系统的优缺点及应用研究2020-09-05 8634
-
请问freertos是硬实时操作系统吗?2020-06-13 1866
-
嵌入式操作系统FreeRTOS的原理以及如何实现移植的方法说明2020-01-14 1869
-
嵌入式操作系统上的FreeRTOS操作系统分析2019-07-01 2234
-
基于FreeRTOS的嵌入式实时操作系统的原理和实现2017-11-18 7528
全部0条评论

快来发表一下你的评论吧 !
