

三电平DTC原理介绍和仿真分析
描述
本文针对传统两电平SVPWM直接转矩控制系统转矩脉动大、响应慢和驱动功率不足的问题,介绍了三电平逆变器的原理及其应用于异步电 机直接转矩控制的具体方法,通过Matlab仿真验证了其可行性与优越性,结果显示该控制方法具有动态响应快、抗扰性强、转矩脉动 小、谐波分量少、开关频率稳定等优点,对提高异步电机直接转矩控制系统的性能以及减小开关管的损耗有一定的成效。
一、传统DTC原理介绍和仿真分析
1.1 DTC原理及仿真
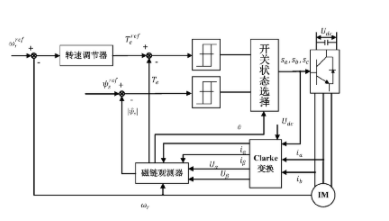
图1-1 直接转矩控制框图
DTC基于定子磁链的位置信号以及转矩与磁链幅值的误差信号直接离线查找矢量表,并将所选择的电压矢量通过变频器作用于电机。
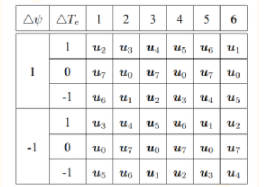
图1-2感应电机DTC系统开关表
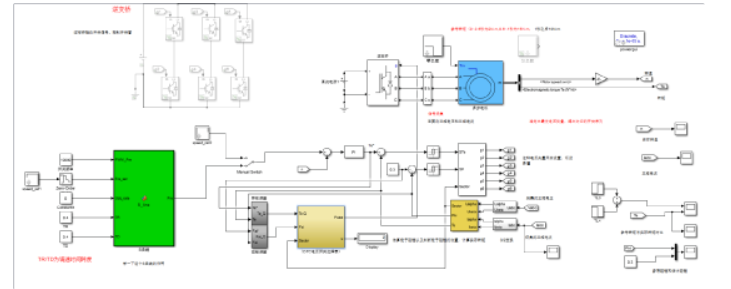
图1-3 DTC整体仿真
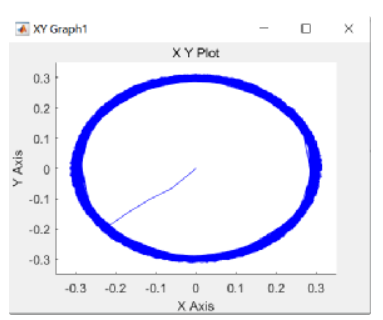
图1-4 定子磁链圆轨迹
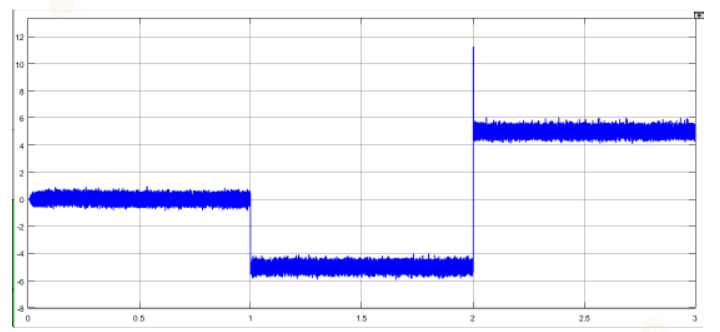
图1-5 DTC下的电机转矩
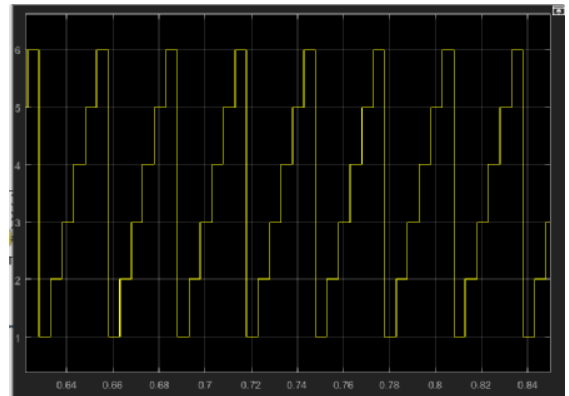
图1-6 磁链扇区
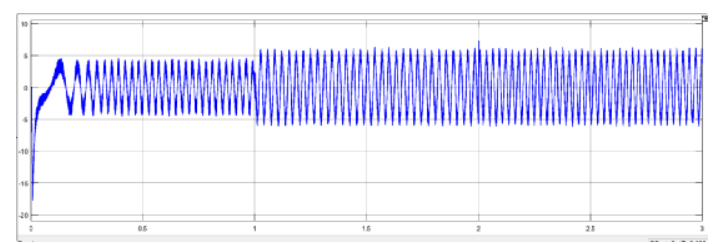
图1-7 定子A相电流

图1-8 定子A相电流FFT分析
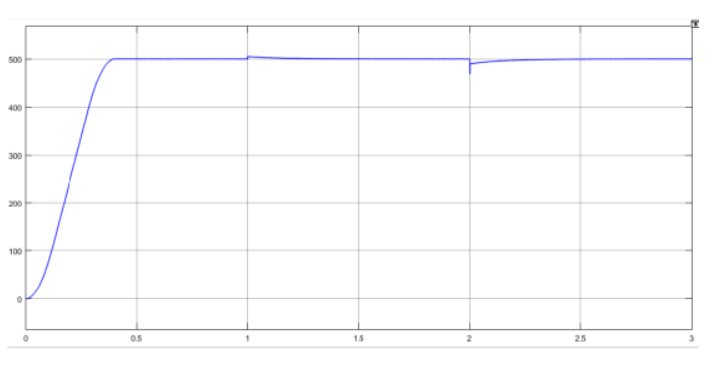
图1-9 电机转速
1.2 两电平DTC仿真结果分析
突加负载后转矩不能快速响应且转矩脉动较大,不能 精确控制在较小范围内,即使在稳态时也有周期性的转矩 波动;定子三相电流谐波分量较大,会使电机发热严重, 开关损耗大,从而减小了系统的输出功率,降低控制系统 的效率;磁链畸变较严重,轨迹偏离标准圆,磁链跨越扇 区分界时还会造成磁链跳变,尤其电机启动时变化幅度 大,不能平滑线性递增,启动后脉动严重;电机启动时转速不能立即响应,升速较慢,且超调较大,达到给定后不 能保持为恒定,在1秒时突加负载时会使转速突变,抗扰性较弱。
二、三电平DTC原理介绍和仿真分析
2.1 三电平DTC原理及仿真
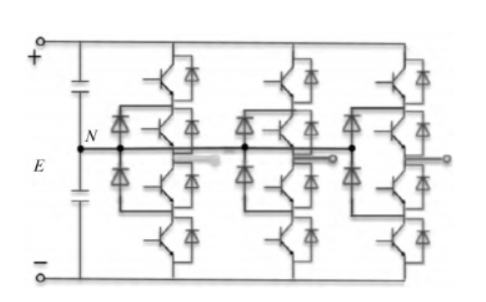
图2-1三电平逆变器原理图
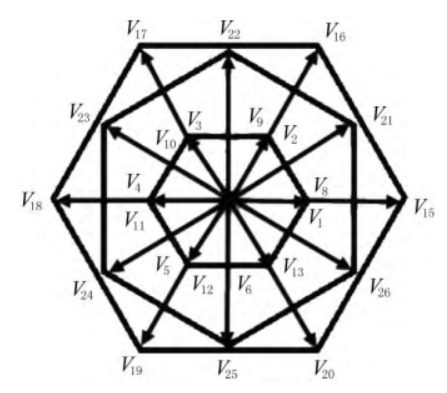
图2-2 三电平逆变器电压矢量图
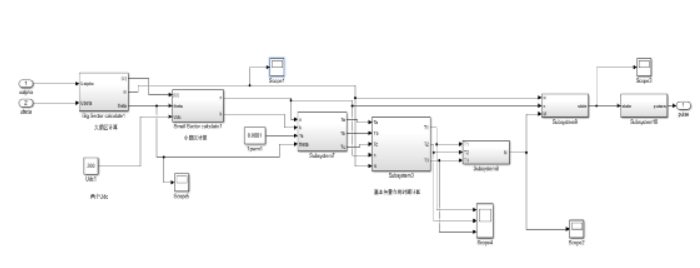
图2-3 三电平SVPWM模块整体框图
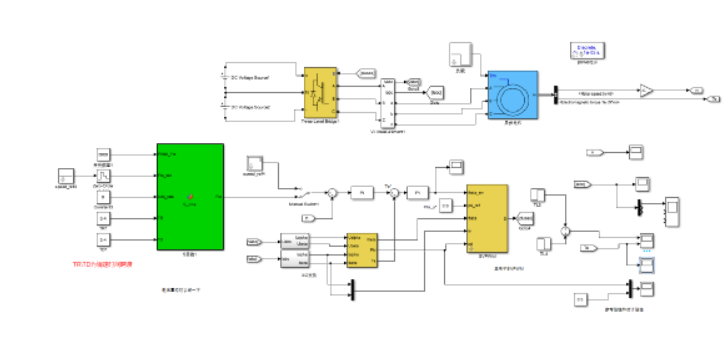
图2-4 三电平DTC整体仿真
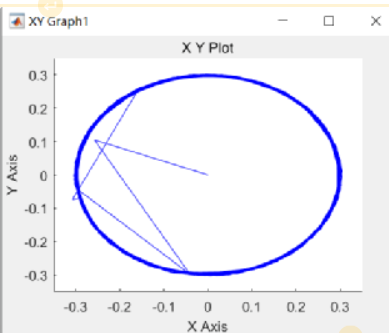
图2-5 定子磁链圆轨迹
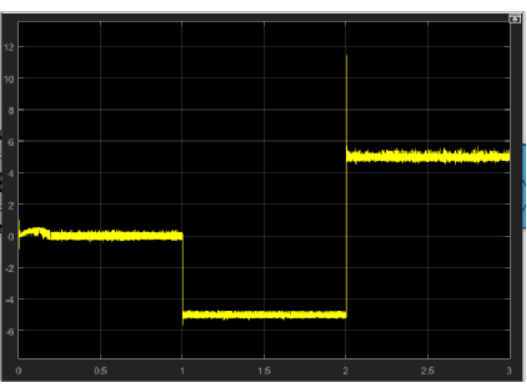
图2-6 DTC下的电机转矩
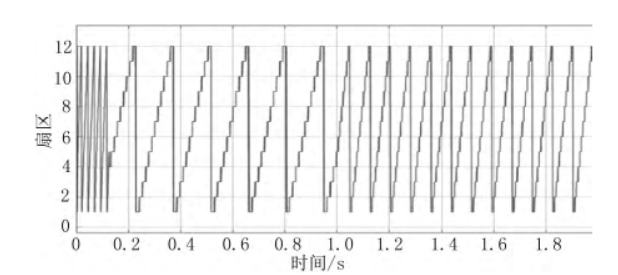
图2-7 磁链扇区
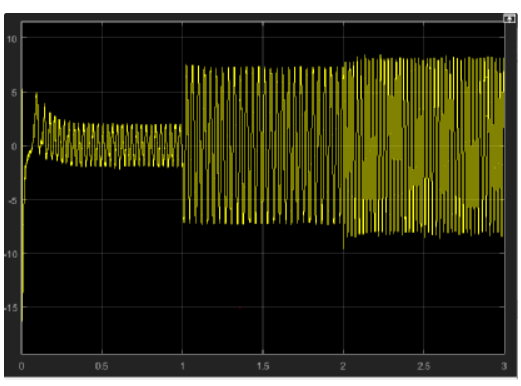
图2-8 定子A相电流
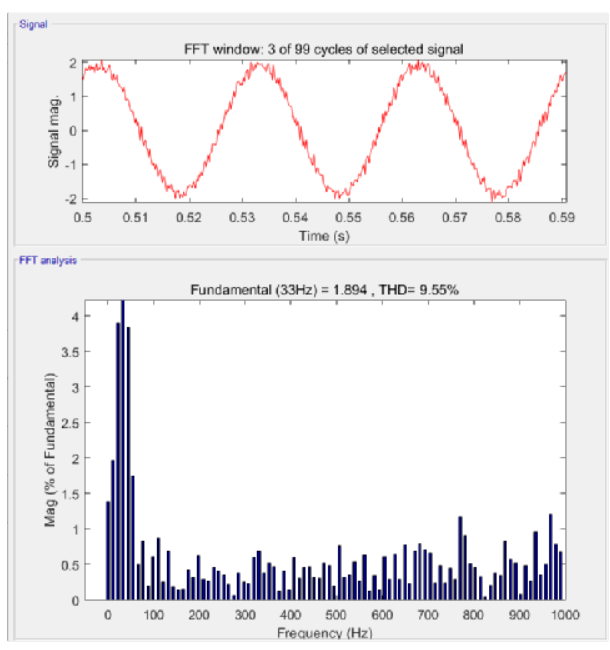
图2-9 定子A相电流FFT分析
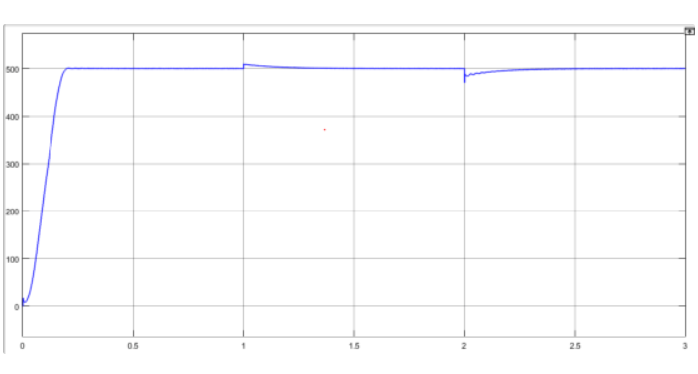
图2-10 电机转速
2.2 三电平DTC仿真结果分析
改进后的控制系统在突加负载后转矩能快速响应,在启动时也能快速建立。定子磁链几乎能平滑变化,更加接近标准圆,磁链跨越扇区边界时不再有畸变现象,整体脉动幅度大大降低;电机转速响应快速准确,接近理想情况,启动时迅速上升,超调极小,稳定后能保持完全恒定,精度高,特别显著的是在应对突加负载时有相当强的 抗扰性和自适性,而且几乎不产生速度降落,产生的微小速降变化快速,将很大程度地减小速度变化对负载造成的 不良影响。定子三相电流更加接近标准正弦波,谐波分量小,体现了开关频率的相对稳定,因此开关管损耗和电机发热问题会得到有效解决,系统效率将应之提高。
三、总结
本文叙述了两电平传统直接转矩控制的控制原理,并进行了仿真,证实了其存在的不足。针对其不足引入了三 电平逆变器,阐述了控制策略,分析了其整个控制过程,并通过仿真验证了三电平多矢量控制对谐波抑制及减小 转矩脉动的有效性和应用于大功率非恒转矩负载的实用性,较为显著地提高了直接转矩控制系统的抗扰性和控制精度。
- 相关推荐
- 热点推荐
- matlab
-
汽车ECU诊断 DTC格式介绍2023-07-26 6593
-
三相两电平逆变器的介绍和Simulink仿真2023-03-17 19068
-
永磁同步电机的直接转矩控制(二)之传统DTC仿真结果分析2023-03-15 719
-
基于matlab的三相三电平逆变器SVPWM算法2023-02-28 1008
-
基于滑模转速控制器的DTC设计2021-08-27 1872
-
三电平基本原理介绍2017-12-19 2456
-
pmsm svm-dtc仿真2016-04-17 4932
-
NPC型三电平逆变器SVPWM控制研究与仿真2016-04-13 1765
-
某型动车组用SVPWM三电平逆变器仿真2016-03-30 693
-
DTC算法的分析仿真(上)2016-01-25 4655
-
三相三电平VIENNA整流器的仿真分析2011-09-22 2807
-
基于DTC感应异步电机的Matlab仿真研究2009-11-18 841
全部0条评论

快来发表一下你的评论吧 !
