

基于电子驱动的人工纤毛的主动超表面
描述
纤毛泵入,是生物有机体在微尺度上控制和操纵液体的一种强有力的策略。然而,尽管近年来在光学、磁和电驱动驱动方面取得了许多进展,但具有应用潜力的工程化纤毛平台的开发,仍然难以实现。
据麦姆斯咨询报道,来自美国康奈尔大学的研究人员开发了基于电子驱动的人工纤毛的主动超表面,可以在液体表面附近创建任意的流动模式。相关论文以题为“Cilia metasurfaces for electronically programmable microfluidic manipulation”发表在Nature上。
纤毛泵送是微观世界中最重要、最普遍的流体输送方法之一,一些开创性的研究,已经展示了基于压力、光、静电和磁相互作用的驱动制造人工纤毛的方法,然而,这些系统有严重的局限性,使其在微尺度上实施起来很有挑战性。此外,目前还没有明确的方法,将它们与移动微型机集成,同时保持局部驱动。静电驱动纤毛,已被证明是一种强大的快速泵送和混合的方法。然而,到目前为止所演示的驱动器都是由大电压驱动的。这种巨大的电压,使得它们与用于无线控制的互补金属氧化物半导体(CMOS)电子器件不兼容。此外,因为在大约1.2V以上的电压下会水解,所以静电驱动纤毛不能在水溶液中工作。
近年来,磁响应材料制造人工纤毛的研究成为了新的关注焦点,目前相关研究已经取得了一定成果。然而,在这种磁性系统中,很难定位驱动或改变纤毛的原位磁化来重新配置流动。因此,为了广泛采用这种传输方法,仍然需要开发新型人工纤毛平台。
康奈尔大学研究人员开发的表面电化学致动器,可以用来克服以上这些挑战。具体来看,研究人员开发的人工纤毛由一个大约50μm长,5μm宽,约10nm薄的光刻制造的条组成,附着在基板的一端,如图1a所示。人工纤毛在磷酸盐缓冲盐水(PBS)中将其相对于Ag/AgCl参比电极的电位提高到约1V,从而触发暴露铂表面的电化学氧化,同时避免了气泡的形成。
而氧化使Pt表面膨胀,导致致动器弯曲(图1a,红色反应途径,左→右)。接着,研究人员施加电压还原Pt膜,使驱动器恢复到初始状态(图1a,蓝色反应途径,右→左),其电流密度约为1mA/cm²,这意味着一个完全被人工纤毛覆盖的1cm × 1cm器件在扫描速率为1V/s时仅消耗约1mW的功率。
为了防止致动器扭曲,研究人员沿每根纤毛设计了三个水平聚合物衬垫,每根纤毛之间间隔15μm。由于表面电化学执行器可以光刻制造,一个4英寸的晶圆上可以制造数百万个。在图1b的右下角为纤毛横切面的环形暗场扫描透射电子显微镜(STEM)图像。
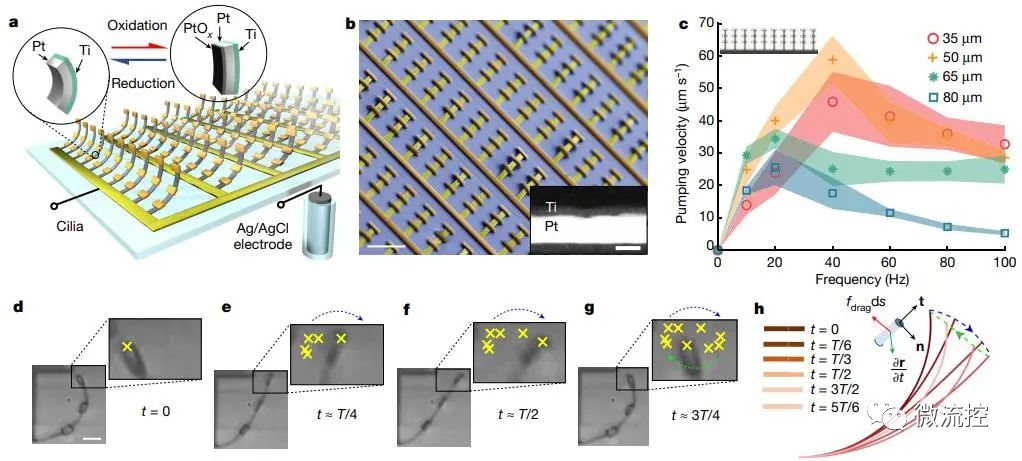
图1 基于表面电化学执行器的人工纤毛
此外,研究人员开发的电压驱动纤毛,在1伏特的驱动电压下,可以产生非交互运动以每秒几十微米的速度驱动表面流动,且可以局部创建一系列元素流几何形状,其纤毛超表面可以产生和切换任何所需的表面流动模式。
最后,研究人员将纤毛与光动力互补金属氧化物半导体(CMOS)时钟电路集成,以演示无线操作。作为概念证明,研究人员使用该电路输出具有不同相位延迟的电压脉冲,以证明使用元时波提高泵浦效率。这些强大的结果,通过实验和理论计算得到了证实,说明其有实现精细尺度微流体操纵的潜力。
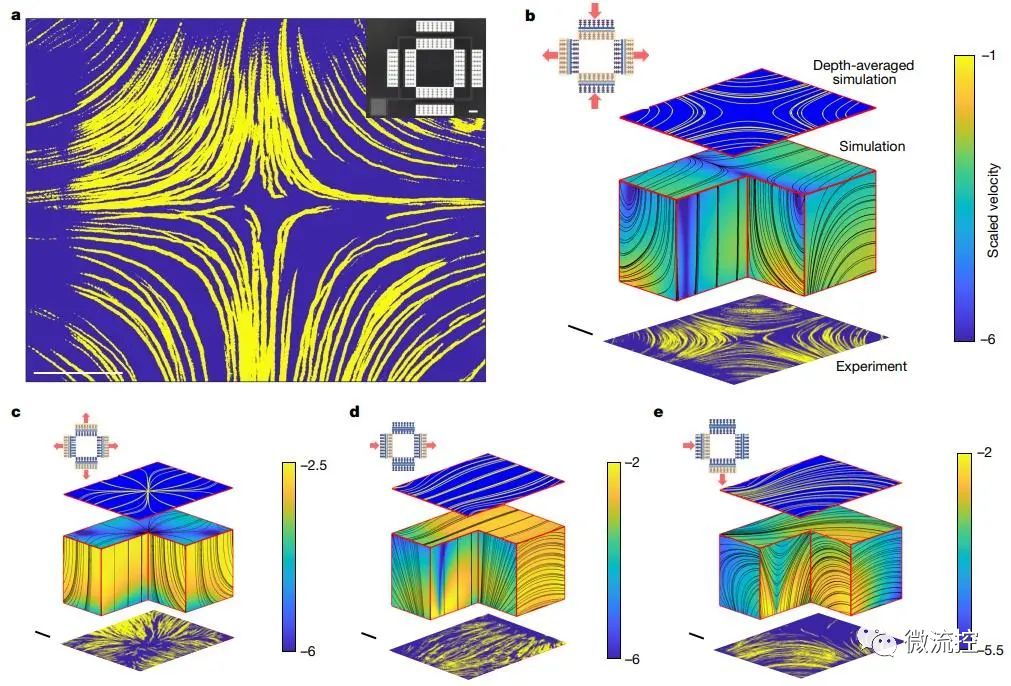
图2 由纤毛单元产生的基本流动模式
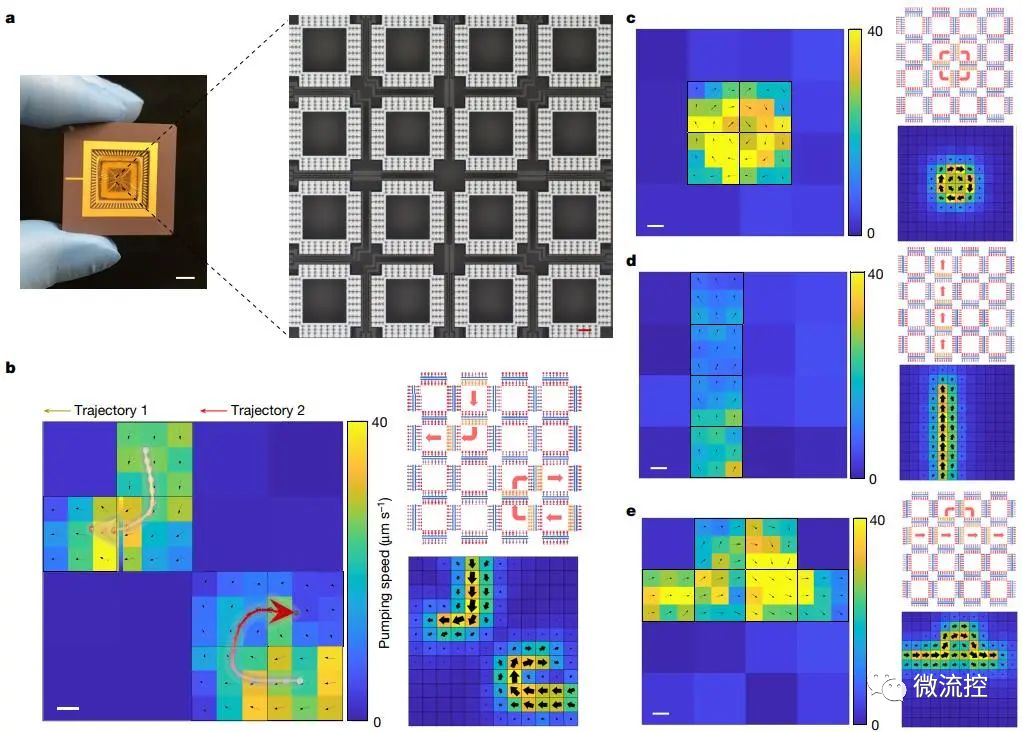
图3 纤毛超表面能够产生任意和可切换的微流体流
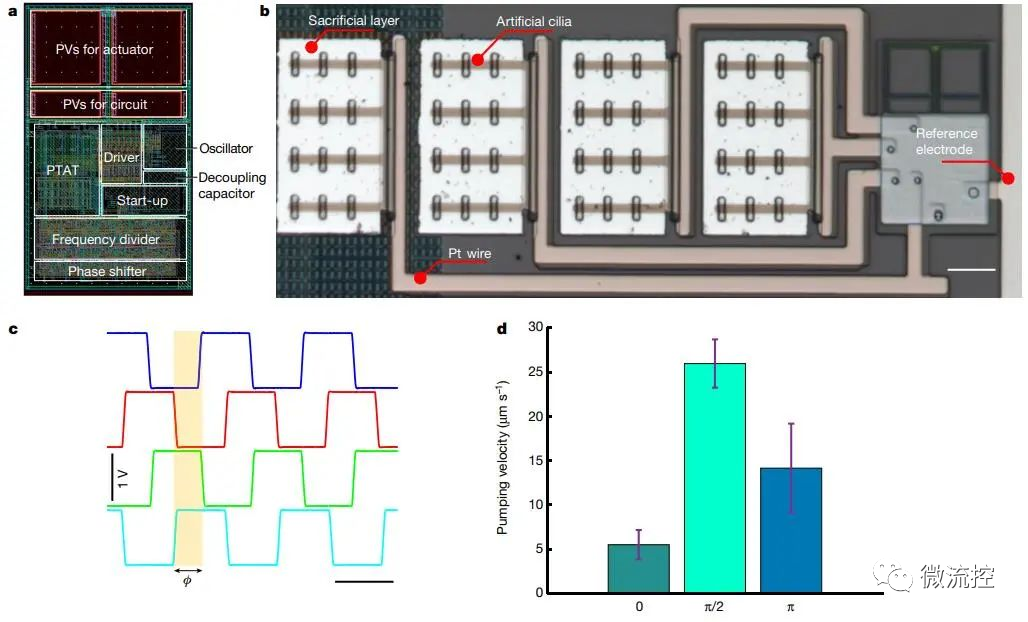
图4 集成人工纤毛阵列的CMOS无线控制产生的元时波
综上所述,研究人员提出的实验和模拟,预测了其开发的人工纤毛平台在水介质中实现无束缚控制和任意切换微流体操作的良好前景。例如,集成传感器的光学驱动CMOS电路,可以用来测量周围流体的化学、光学和热状态,以便选择合适的微流体操作,因此具有在简单的阳光照射下,使流体在轻型设备中的大量应用的潜能。
论文链接:
https://doi.org/10.1038/s41586-022-04645-w
审核编辑 :李倩
-
COMSOL Multiphysics在超材料与超表面仿真中的应用2024-02-20 7760
-
人类与人工智能机器人合作的前景2018-04-16 3939
-
资深大牛认证的干货:人工智能与matlab学习资料2018-11-06 12729
-
基于DSP的人工电子耳语音信号处理的研究2020-05-26 1246
-
路径规划用到的人工智能技术2021-07-20 2429
-
嵌入式RK3399主动模式的人工智能计算棒部署流程是怎样的2022-02-15 2244
-
超表面的大规模量产方法亮相,有望革新智能手机镜头2020-06-24 4360
-
什么是超表面技术?2021-01-06 17985
-
铌酸锂超构表面制备及光子学应用2023-01-14 6921
-
什么是超表面?为什么超表面可以取代LCD2023-03-03 7201
-
非线性光学超构表面的基础知识与应用概述2023-08-14 7096
-
什么是光学超表面?超表面可以分为哪几种?2023-09-04 3782
-
什么是光学超表面?2023-12-19 1770
-
什么是超表面光学技术?2024-12-18 1436
-
CST+FDTD超表面逆向设计及前沿应用2025-06-05 1047
全部0条评论

快来发表一下你的评论吧 !
