

一种基于磁场驱动的软体微型机器人
描述
这是60年前,物理学诺贝尔奖得主费曼先生的幻想,现在,体内的“外科医生”已成为现实——微型机器人。具有主动转向能力的遥控微型机器人在医疗应用中具有广阔的前景。
据麦姆斯咨询报道,最近,北京理工大学研究人员研究人员开发出一种基于磁场驱动的软体微型机器人,直径只有200μm,不仅能凭借出色的控制和转向能力模拟在血管中“跑酷”,还能操作微型物体!相关研究成果发表在Cyborg and Bionic Systems期刊上。

让微型机器人动起来,这是第一步。然而这并不容易,因为在微观世界里,很多物理定律与在宏观世界里不一样,微尺度狭窄空间内的物体由于强大的粘附力作用,很难自由地运动。
为了解决这个问题,研究人员使用了磁驱动方法,其原理如下:所有带磁性的物体在匀强的磁场下,都会受到转动力,让它本身磁矩的方向与磁场方向同向。
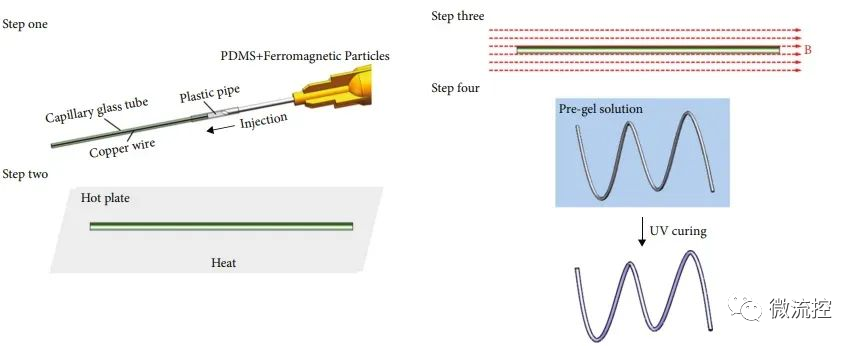
为了给机器人上磁,研究人员将钕铁硼颗粒和柔软的有机硅PDMS材料结合,制成微型软体机器人,并在表面覆盖了一层生物相容性的水凝胶层,这样不仅克服了微型物体与机器人软尖端之间的粘附力,还可降低微型机器人与基板之间的摩擦力,另外还可减小对生物目标的伤害。
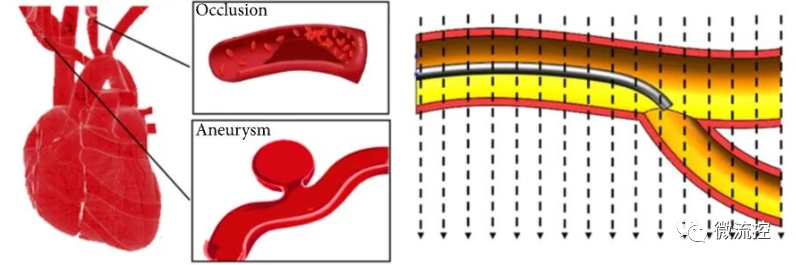
磁驱动系统由一对垂直电磁铁组成,微型机器人根据磁场进行转向和振动移动,由于机器人是软的,可以灵活弯曲身体,这使其能够在复杂的分叉环境中灵活转向。
为了测试微型机器人能否在血管里“跑酷”, 研究人员采用3D打印工艺制作了一个宽度为800μm的微流控通道,测试机器人在分叉管道中的转向和运动能力。
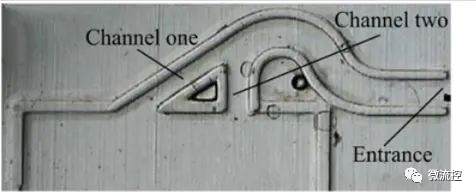
在整个过程中,利用不同方向的磁场来控制微型机器人的转向,时变磁场可以让微型机器人振动起来,从而消除与环境之间的粘附力,同时推动前端,让机器人向前运动。
当微型机器人遇到分叉时,研究人员通过控制电磁铁,产生平行于目标路径的磁场,使微型机器人的尖端指向该方向。

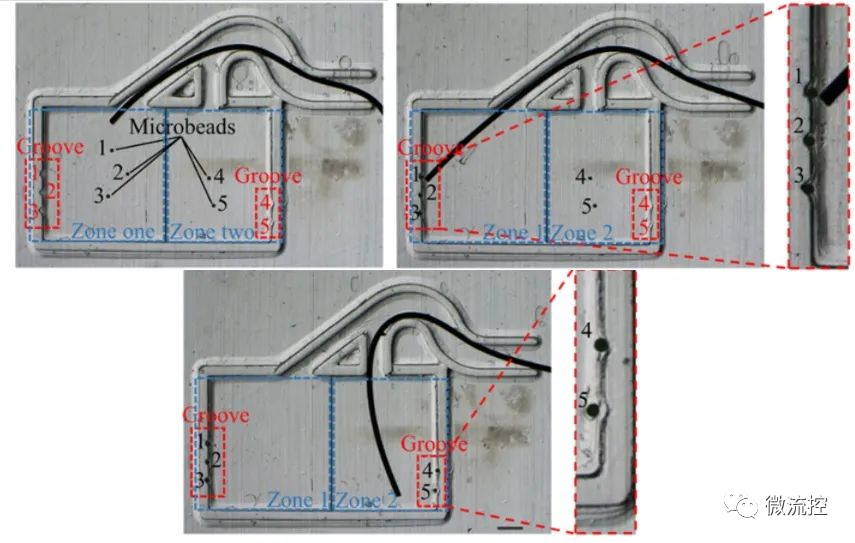
此外,微型机器人还可以操纵微型物体,研究人员设计了一个“搬珠子”游戏,在通道中随机放置了5个微珠,通道还包含几个凹槽,微型机器人可以通过磁场控制,穿过层层迷宫将目标珠子“搬”入目标凹槽中,该任务仅需数分钟就可完成。
在医学应用里,微型机器人可以作为药物的载体,在人体内把药物送到它需要的地方,即“靶向治疗”,也可以成为一把“手术刀”,直接进入血管把血栓溶碎,然后带出来,解决血栓的问题。然而,想让微型机器人真正应用到体内,还有较长的路要走。
北京理工大学研究人员开发的这款软体微型机器人能够在复杂“迷宫”里自如运动和转弯,并且操纵微型物体,这证明了该微型机器人具有巨大的血管内操作潜力,未来,研究人员计划进一步减小微型机器人的尺寸,并提高其控制精度。
论文链接
https://doi.org/10.34133/2022/9850832
审核编辑 :李倩
-
血管微型机器人无损伤体内驱动方法2009-06-28 2336
-
微型机器人关节使用超声波电机的优势2020-11-02 2824
-
选择微型机器人电机需要考虑什么?2021-01-22 2301
-
微型机器人由哪些部分组成2021-09-10 1754
-
血管微型机器人无损伤内驱动方法2009-09-08 730
-
一种微型机器人局域网的设计2011-09-08 1013
-
穿肠过肚微型机器人:未来医疗的神奇法宝2015-06-03 4365
-
《Nature》发布毫米级软体机器人,为人类研究体内微型机器人提供新思路2018-02-09 10086
-
我国设计出一种微型机器人,将有望在人体内运输细胞2018-07-02 2209
-
最新黑科技:人体内运输细胞的微型机器人2018-07-27 6385
-
微型机器人会给我们的生活带来什么影响2019-10-29 4055
-
新型软体微型昆虫机器人出击 可以快速移动的同时还具有一定的智能性2019-12-20 1184
-
详谈仿白细胞微型机器人的应用2020-08-06 1285
-
爬壁微型机器人的新型建造方法2021-03-29 2494
-
基于磁场驱动的无线微型软体机器人应用2023-09-16 1474
全部0条评论

快来发表一下你的评论吧 !
