

4D成像雷达能否替代毫米波雷达?
描述
如果没有雷达,一台自动驾驶车要如何穿透黑暗?
当人们对智能驾驶展现出前所未有的热情时,雷达从教科书中走了出来。如同所有新事物一样,车载雷达也有一段被排斥、被质疑的心酸过往。直到今天,它成为智能驾驶的标配硬件。
比起摄像头的直观所见,雷达更偏向于“感受”。这样一双“车眼”不断分化、进化,花名越来越多,内部的明争暗斗也更胜以往。比如:谁和谁搭配干活效果更好,怎么搭、如何安排位置才最合适。
而这里始终有一个主题,谁配站C位?是视力更好的激光雷达,还是不挑时间全天候工作的毫米波雷达?就像歌手陶喆唱的那样“你爱我还是他,是不是真的他有比我好,你为谁在挣扎……”
不出意外,答案是第三者。
是“冷门”配置 还是C位出道
一个名叫4D成像雷达的角色搅乱了这一池春水。
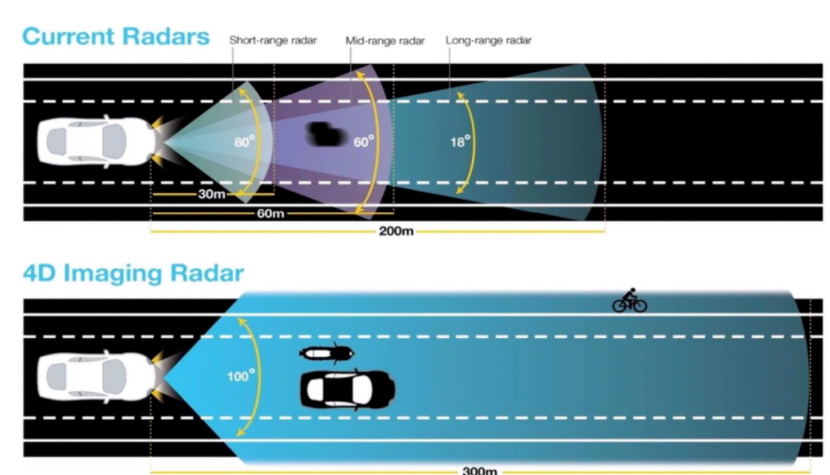
即将上市的飞凡R7在做功课预告时,为不温不火的4D成像雷达添了一把热度。官方介绍,飞凡R7国内首发Premium 4D成像雷达,最远探测距离达到350米,甚至可以采集前前车的行驶状态数据。
通常连普通窨井盖和路标都分不清楚的毫米波雷达,探测目标竟然可以贯穿两辆车?这一说法是否言过其实,还有待验证。目前市面上广泛采用的3D毫米波雷达不仅无法进行目标分类,在测距上较激光雷达也是差上许多,而后者在恶劣天气下显得力不从心。
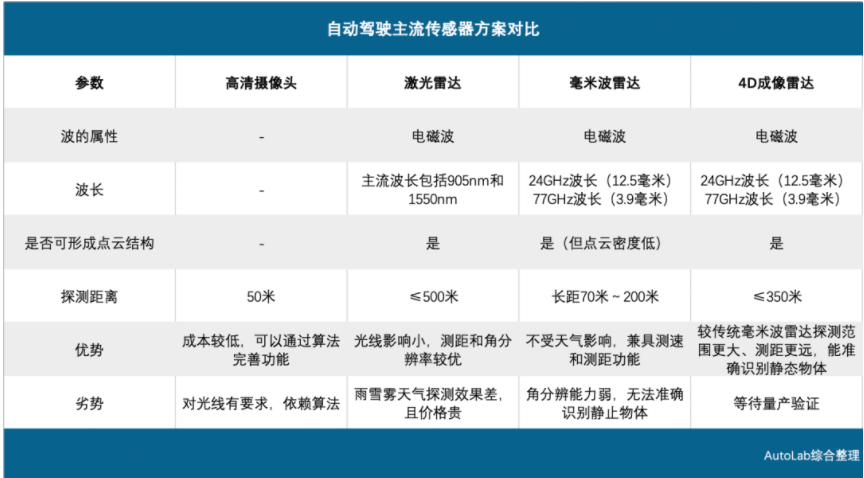
4D成像雷达算得上是毫米波雷达的进阶版本,在距离、速度、方向角的基础上多了一个高度探测值,不仅提高了视力,探测范围和分辨能力都有所增强。另外,4D成像雷达的成本大概只有激光雷达的10%~20%。
因此每日汽车电讯认为,4D毫米波成像雷达既从性能上解决了传统毫米波和激光雷达的不足,又满足了价更低更容易量产这一规律。如果量产验证的效果好,未来不排除吃下激光雷达的部分市场份额。
按照恩智浦ADAS产品线总经理Steffen Spannagel的说法,成像雷达正处于发展早期,但未来性能有望大幅提升。理想状态下,成像雷达最终可能会取代激光雷达。
这是全球汽车雷达龙头厂商的观点,但比起不断打破争议的激光雷达,4D成像雷达确实要更冷门一些。IDC的一组数据表明,今年第一季度L2级自动驾驶在乘用车市场的新车渗透率为23.2%,与Robotaxi产业发展相比,乘用车市场仍然聚焦于辅助驾驶功能。换句话说,4D成像雷达上车难免有点大材小用。
到2030年,L2+自动驾驶汽车预计会占据汽车总产量的近50%。彼时约有一半的车辆拥有接近解放双手的自动驾驶能力,如果以L2+或L3~L5级自动驾驶为前提,4D成像雷达可能会刚刚好。
尤其L3级及以上的自动驾驶系统支持解放双手,车身雷达的可靠性更加重要。这也是为什么L3级以上的传感器都会选用一些成像雷达。试想一下,一辆启动了自动驾驶模式的车辆在高速路上行驶,突遇一场大雾或者大雨,摄像头发挥不了作用,激光雷达的探测精度再高也等同于半块废铁。这时,4D成像雷达的“火眼金睛”就可以派上用场。
事实上,越来越多的观点认为,4D成像雷达将会成为自动驾驶最核心的传感器。例如在Mobileye的计划里,未来乘用车将只需要一颗前向激光雷达和一颗360度全包覆车身的毫米波雷达。或许未来,行业不用再为雷达的布置而绞尽脑汁了。
从这个角度讲,飞凡R7的自动驾驶功能确实可以期待一下。至于4D成像雷达,它的“进化史”也在持续更新中。
4D不止多了一个度 进化大有乾坤
在技术趋势上,一些厂商已经开始从24GHz(12.5mm)转向研发综合性能更好的77GHz(3.9mm)毫米波雷达产品。波长越短,意味着角分辨率越高,获得的点云图密度越高,成像就越精准。
同时77GHz的4D毫米波成像雷达更适合长距探测,体积也可以做到更小,提高了车型设计的灵活度。国际上,恩智浦、大陆、博世、安波福、采埃孚等Tier1基本完成对该领域的布局;国内包括隼眼科技、华域汽车、华为、为升科科技(台湾)等公司也纷纷推出了77GHz的4D成像雷达解决方案。
根据Yole Développement的测算,4D雷达市场规模将从2021年的3亿美元增长到2025年的35亿美元,期间成像雷达的市场将从1亿美元增加至43亿美元,年复合增长率为109%,远高于汽车雷达市场整体增长水平。毫无疑问,接下来几年雷达市场的剿杀将异常激烈。
4D成像雷达是否会胜出,除了取决于产品本身的竞争力外,适配芯片的规格也十分关键。毕竟上层建筑好不好,地基占很大的权重。4D成像雷达一般包含射频前端MMIC、数字信号系统DSP和后端算法等主要硬件。“4D成像雷达的发展趋势有一个明显特征是,前端会有更多通道,后端会有更强的算力需求”,隼眼科技CTO张慧这样说。
简单理解,前端收发通道数量越多,提供点云数据的能力就越强,识别物体会更加精准。当下主流的车载4D成像毫米波雷达多是通过2片MMIC芯片级联,实现48个通道(6发8收)。增加通道数,意味着要增加更多的芯片级联。
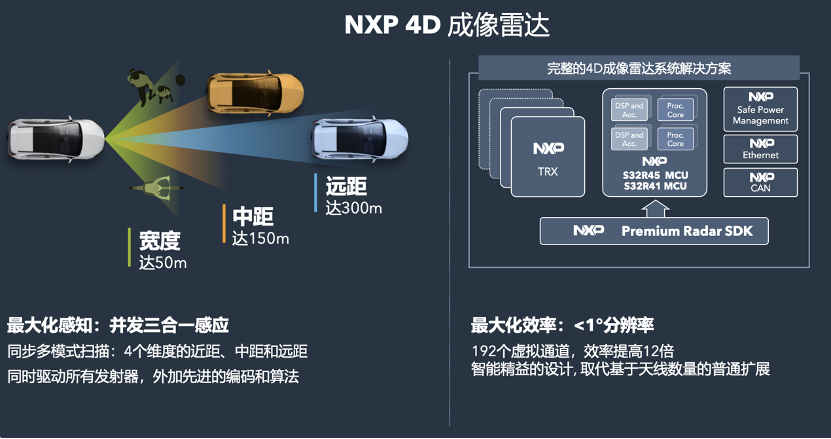
此外,4D成像雷达的一个发展趋势是与人工智能技术的融合更深了。当毫米波雷达和深度学习得到的信息相融合时,会产生大量的算法需求,这也对处理器提出了更高要求。处理器的性能极大决定了雷达前端和后端的使用效果。相比于通过增加天线数量提高分辨率的传统方法,芯片级联逐渐受到行业认可。恩智浦在今年早些时候推出的S32R45、S32R41成像雷达处理器,采用16nm制造工艺,是业内为数不多能够胜任高达4片MMIC芯片级联的产品。在高达12发16收等效192个虚拟通道算力的需求下,据称S32R45一片就能搞定。
事实上,车载雷达芯片和手机应用处理器一样都遵从摩尔定律的发展,也就是说,车载雷达芯片也会向更先进技术节点(如7nm)和更集成的方向发展。不过,对于角雷达这类不需要较强分辨力或成像能力的产品,现阶段的技术水平已经能满足所需。
目前恩智浦正在开发第六代雷达芯片,具体规格还没公开。不过在提供芯片之余,恩智浦还提供雷达的软件算法,从软件层面提升雷达的角分辨率,同时解决车与车之间雷达工作产生的干扰问题。
4D成像雷达在传统3D毫米波雷达基础上不止多了一个探测维度,目前技术的迭代与升级似乎还不是最理想的状态。为升科科技CTO蔡青翰也说,目前毫米波雷达发展到4D雷达或4片级联雷达,远远没有走到雷达所能达到的尽头。传统毫米波雷达最大的缺点在于角分辨率不足,如今分辨率提上来了,若再继续通过芯片级联的方式提高分辨率,边际效益明显会打折扣。
他提出一点,4D成像雷达更突出的问题是动态范围的不足。以目前4片级联技术来看,要做出一款对环境感知更强的车载传感器,动态范围还有很大提升的空间。比如在反射性能较差的介质中,雷达的动态范围可以确保必要的灵敏度。
动态范围其实也很好理解,以相机为例,动态范围越大,捕捉到的高光区和阴影区的图像就越充满细节。譬如最近几年,手机行业已经开始关注相机的AI 降噪与 HDR 融合。如果4D成像雷达解决了这一问题,未来会不会是雷达为主摄像头为辅呢?
-
拥抱自动驾驶,4D成像毫米波雷达已悄然崛起!2022-01-12 9442
-
4D成像雷达专栏 | 4D高分辨毫米波雷达概述2023-05-21 9264
-
漫谈车载毫米波雷达历史2022-03-09 12123
-
剖析如何做好一款4D高分辨毫米波雷达2021-04-05 9723
-
傲酷雷达推出商用4D成像毫米波雷达 ST推出汽车卫星导航芯片2022-03-14 5398
-
什么是4D毫米波雷达?2022-07-14 14802
-
4D毫米波雷达加速了4D成像系统的可能性2023-01-04 2594
-
什么是4D毫米波雷达?4D毫米波雷达与传统雷达有何区别?2023-03-13 17515
-
什么是4D成像毫米波雷达?4D成像毫米波雷达作用解析2023-03-20 5069
-
高阶自动驾驶落地“变局” 4D毫米波成像雷达有何作用2023-04-07 1343
-
4D毫米波雷达市场技术盘点2023-05-09 1348
-
经纬恒润新产品系列 | 4D成像毫米波雷达2023-05-17 1716
-
对比ZF和特斯拉的4D毫米波雷达设计,国产4D毫米波雷达迅速崛起2023-07-07 3286
-
国内4D毫米波雷达厂商名录2023-11-21 4019
-
4D毫米波成像雷达的测试要求都有哪些嗯?2024-01-18 2433
全部0条评论

快来发表一下你的评论吧 !
