

英创汇智AEBS功能描述与应用场景分析
描述
引言:ADAS (Advanced Driver Assistance System)作为一种高级驾驶辅助系统,其利用车载信息传感器获取道路目标信息并对车辆的行驶做出部分自动控制,以此减轻驾驶员的驾驶负担。此外,在主车即将发生碰撞或失稳危险而驾驶员未及时采取有效措施时,该系统可对主车进行自动安全控制,从而避免交通事故的发生或减小交通事故的伤害程度。其中ADAS包括AEBS、ACC、LKAS、BSD等功能,本文主要介绍AEBS (Autonomous Emergency Braking System) 的原理,以及英创汇智AEBS系统环境感知方案的工作机制。
一、AEBS发展的意义
据相关数据分析,导致追尾事故的驾驶员的制动行为主要有以下三种:
1.制动迟缓:驾驶员全力制动,但采取措施过晚;
2.制动不足:一般驾驶员采取制动,却制动过轻;
3.无制动:驾驶员未注意到危险,而未采取制动措施;
针对以上三种交通事故情况,英创汇智研发出AEBS系统。AEBS是一种主动安全技术,通过传感器检测可能发生的碰撞危险,提前警示驾驶员制动,并在必要时自动制动,防止碰撞的发生或最大限度的降低碰撞的伤害。
二、AEBS技术环境感知配置方案
ADAS系统由环境感知、控制决策、底层执行和人机交互四个基础模块,具体架构如下图所示:
ADAS整体架构详解
其中,感知模块由毫米波雷达和摄像头组成,通过雷达和摄像头数据融合,感知周边障碍物信息以及可通行区域信息。控制决策模块则根据感知信息,决策所需要的控制指令,向底层执行模块发出指令,控制车辆制动系统来完成自适应跟车和自动紧急刹车。而ADAS系统的难点,在于环境精准识别以及基于EBS系统/改进ABS系统的主动制动执行系统。
AEBS作为ADAS系统中的一个功能,其环境感知模块所需传感器与ADAS系统一致,主要由毫米波雷达和摄像头构成,进一步地毫米波雷达与摄像头优缺点以及工作特性总结如下:

三、AEBS功能描述与应用场景分析
AEBS主要包括预测碰撞警告 (PCW, Predictive Collision Warning)、紧急制动辅助 (EBA, Emergency Brake Assist)、自动紧急制动 (AEB, Autonomous Emergency Braking)等子功能。
3.1AEBS功能描述
(1)PCW:该功能主要针对追尾交通事故中场景一,当驾驶员没有意识到行车过程中即将到来的危险时,通过在驾驶舱内发出蜂鸣声、收紧安全带甚至车辆突然制动抖动等警告措施,提醒驾驶员即将到来的危险,进而避免事故的发生。根据驾驶员的设置,AEBS可以实现不同敏感性的PCW,其具体工作参数与触发条件如下图所示:
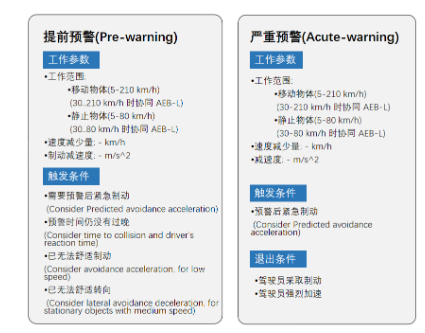
不同敏感性的PCW对比
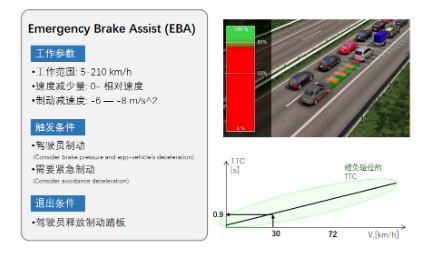
(2)EBA:该功能主要针对追尾交通事故中场景二,当驾驶员踩下制动踏板进行制动,但由于驾驶员经验不足或者一些其他原因,使得车辆无法按照驾驶员预期制动效果进行制动时,通过控制器自行分析决策,合理控制车辆制动(放大根据驾驶员意图控制的制动力矩),保证驾驶员的安全。进一步地EBA功能工作参数与切换条件总结如下:
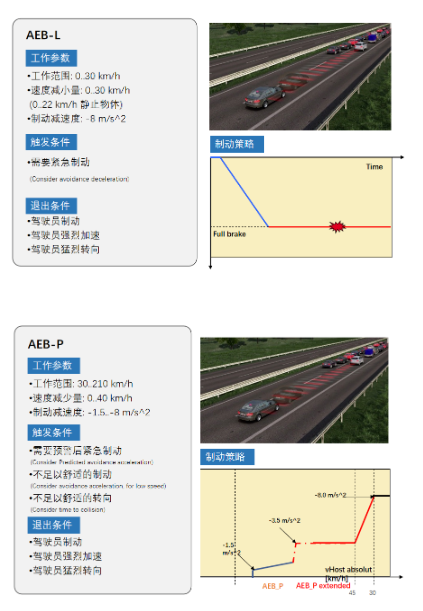
(3)AEB: 该功能主要针对追尾交通事故场景三,即当车辆触发了PCW功能以后,也并未成功警示驾驶员,这时车辆完全由控制器接管,进行制动控制。该功能在最大限度上避免交通事故的发生,当交通事故无法避免时也可减轻交通事故带来的伤害。当两车之间运动学关系不同时,AEB功能会提供不同制动策略(低速场景下为AEB-L功能,其余场景下为AEB-P功能),如下所示:
3.2AEBS应用场景分析
搭载AEBS的车辆在行驶过程中各子功能工作过程如下图所示:
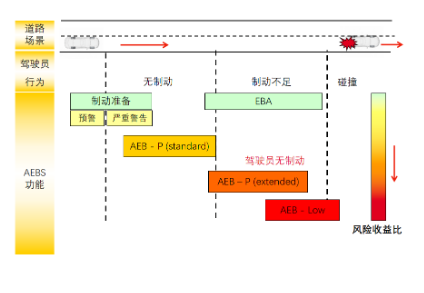
在车辆正常行驶过程中,当前方有障碍物碰撞风险时,首先触发PCW功能对驾驶员进行警告,随着车辆的行驶,一种情况是如果驾驶员踩下制动踏板但制动不足时触发EBA功能(或者驾驶员完全制动不触发EBA功能);另一种情况是驾驶员没有踩下制动踏板,这时AEB功能触发,根据当前车辆与前方障碍物的关系,AEB功能对本车进行不同强度的制动控制,最后避免交通事故的发生或者减轻交通事故的伤害。
搭载AEBS的车辆在行驶过程中子功能触发后制动力如下图所示:
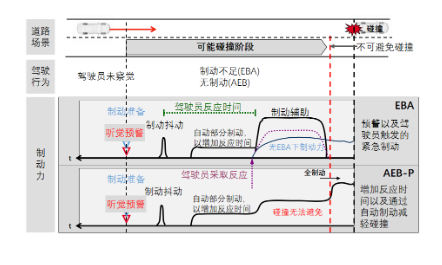
随着车辆的行驶,首先触发PCW,其中通过突然制动抖动来提醒驾驶员,因此存在制动力变化;然后考虑到安全性,AEBS功能会进行自动部分制动以增加驾驶员反映时间,来避免交通事故;最后根据驾驶员的实际操作来判断触发EBA功能还是AEB功能,进而避免交通事故或者减少碰撞伤害。
四、AEBS 决策与规划层分析
4.1AEBS 算法架构
AEBS主要通过车辆搭载的摄像头以及毫米波雷达(也可单独使用摄像头)进行周围环境的感知建图,通过与CAN网络通讯获取自身车辆状态信息,进一步地根据本车信息与周围环境信息进行判断,当满足各子功能触发条件时,各功能开始工作,从而避免交通事故的发生或减小交通事故的伤害程度。其算法架构如下图所示:
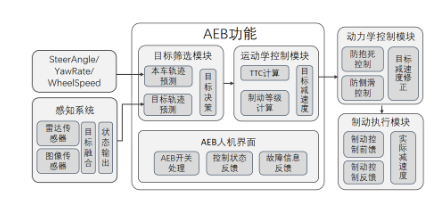
AEBS算法架构
AEB算法主要分为四大模块:感知系统模块、AEB功能模块、动力学控制模块和制动执行模块。其中AEBS各子功能的不同之处在于本车与前方障碍物之间的运动学关系以及车辆自身状态,AEBS根据获取的相关信息进行不同危险程度的判断进而触发不同子功能。
4.2子模块间关系
感知系统将融合后的障碍物信息发送到目标筛选模块,与此同时本车轨迹预测模块根据本车相应运行状态计算转弯半径。转向半径计算模块计算出车辆的转向半径,被目标筛选模块、TTC计算模块、FCW激活条件判断和AEB激活条件判断所使用。目标筛选模块通过横向距离筛选出最危险的目标障碍物,最危险的目标障碍物信息被TTC计算模块和目标减速度计算模块。TTC计算模块通过与目标障碍物的相对距离和相对速度计算出实时TTC,计算出的TTC被预警模块和紧急制动模块所使用。目标减速度计算模块本着使车辆停在安全距离范围内的原则,对目标减速度进行计算,计算出的目标减速度被紧急制动模块所使用。预警模块根据危险程度通过预警逻辑向执行层发出预警指令。紧急制动模块根据危险程度通过紧急制动逻辑向执行层发出制动指令。预警模块和紧急制动模块向底层发出制动指令的同时也向人机交互模块发送信号灯和声音执行指令,人机交互模块同样也可以通过按钮来控制预警模块和紧急制动模块。
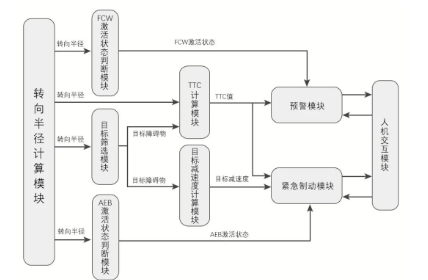
子模块关系图
(1)感知系统模块
感知系统模块主要包括雷达传感器目标探测,摄像传感器目标识别,以及两者目标检测的融合。
(2)AEB功能模块
■ AEB人机界面;该部分主要与驾驶员互动用,集成AEB开关,显示控制状态和故障信息;
■ 目标筛选模块:该部分主要针对雷达和摄像头检测出来的目标进行筛选,根据本车轨迹预测和目标轨迹预测,判断判断两车的运动轨迹是否重合,存在潜在的碰撞可能性,以此来确定目标车辆;
■ AEB运动学控制模块:搭建TTC模型,计算出将要碰撞的时间t,并根据车速v和碰撞时间t计算出制动等级,并制定每个等级下的目标减速度。
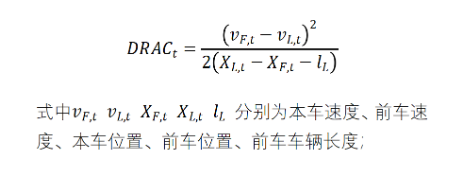
自车与目标车辆的纵向车速之差,计算方法见公式:

(3)动力学控制模块
■ 由上一个模块得到了目标减速度,但是并没有考虑整车的动力学特性。实际的目标减速度还要根据动力学特征,在防抱死控制和防侧滑控制的基础下进一步的修正目标减速度。
(4)制动执行模块
■ 制动执行模块主要由ESC完成,ESC为电子稳定系统,连接ABS模块,可以在汽车紧急制动时保证汽车的稳定性,按要求执行AEB给出的目标减速度。
五、碰撞风险评估准则
TTC (Time-to-collision) 是一个经典的碰撞风险评估的准则,但其无法有效反映车辆行驶过程中潜在的风险,因此下面介绍几种碰撞风险评估准则:
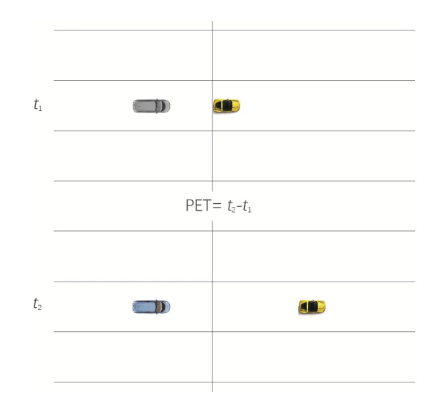
(1)PET (Post-encroachment time) 是一辆车进入冲突点的时间 (t2) 与另一辆车到达该点的时间 (t1) 之差,具体情况见下图:
(2)DRAC (Deceleration rate to avoid collision) 能够很好察觉车辆行驶过程的潜在危险,其计算公式如下:
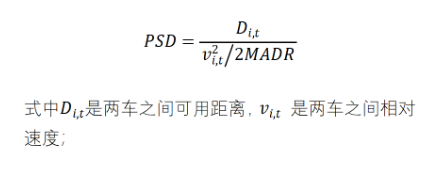
(3)PSD (Proportion of stopping distance) 是两辆车之间可用的距离与MADR (最大可用DRAC所需的距离)之比,具体计算公式如下:
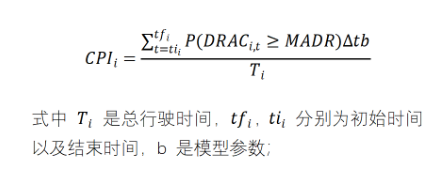
(4)CPI (Crash potential index) 是某时刻避免碰撞的减速率(DRAC)超过MADR的概率,其中MADR 会受到车辆种类以及道路环境的影响,具体计算公式如下:
鉴于TTC在衡量车辆碰撞风险上存在缺陷,目前本公司借鉴上述碰撞风险评估准则,正在逐步开发新型的碰撞风险评估准则。
-
USB协议分析仪的技术原理和应用场景2024-09-24 4062
-
NFC协议分析仪的技术原理和应用场景2024-09-25 4316
-
射频分析仪的技术原理和应用场景2024-11-26 4379
-
时域网络分析仪的原理和应用场景2025-01-13 688
-
信号分析仪的原理和应用场景2025-01-17 795
-
函数信号分析仪的原理和应用场景2025-01-20 589
-
混合信号分析仪的原理和应用场景2025-01-21 438
-
脉冲信号分析仪的原理和应用场景2025-01-23 1445
-
小容量OLT应用场景分析2020-12-03 4143
-
几种LED调光协议分析及具体应用场景介绍2021-12-31 2209
-
英创汇智AEBS系统环境感知方案的工作机制2022-06-13 8160
-
线控底盘企业英创汇智连获两大奖 英创汇智这个双十一收获满满2023-11-12 1349
-
国芯科技与英创汇智携手推进新能源汽车线控底盘技术2024-02-03 1523
-
英创汇智全自动ESC海外工厂正式投产2025-04-25 793
-
英创汇智先后亮相国内三大行业盛会2025-10-11 450
全部0条评论

快来发表一下你的评论吧 !
