

分享一个不错的颜色检测器/传感器电路图
描述
这是颜色检测器/传感器电路图。该电路将感应八种颜色:绿色、红色和蓝色(作为原色);洋红色、青色和黄色(作为二次色);和黑白。这对机器人项目非常有用。
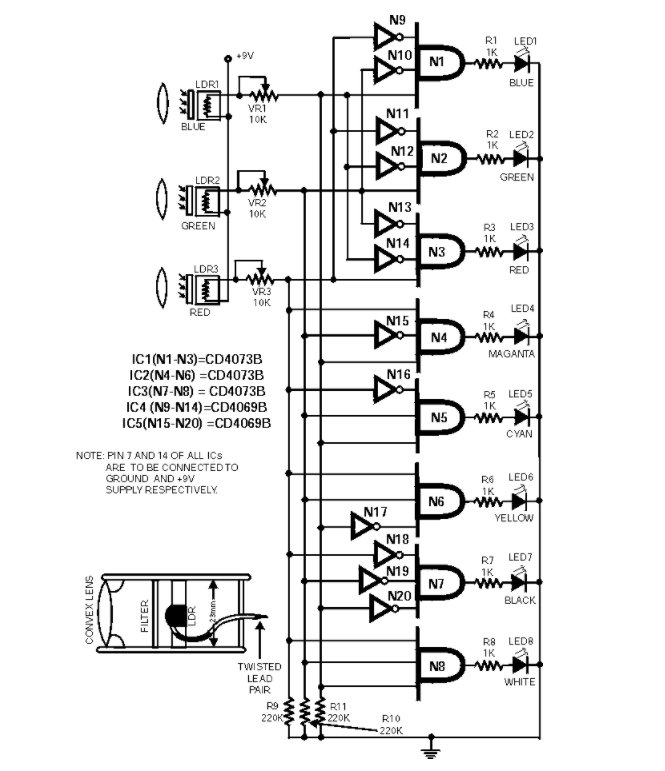
该电路基于光学和数字电子学的基本原理。需要检测颜色的物体应放在系统前面。从物体反射回来的光线会落在固定在三个LDR前面的三个凸透镜上。凸透镜用于会聚光线。这有助于提高LDR的灵敏度。蓝色、绿色和红色玻璃板(滤光片)分别固定在LDR1、LDR2和LDR3的前面。当来自物体的反射光线落在小工具上时,彩色滤光玻璃板决定了哪个LDR会被触发。
该电路仅使用“与”门和“非”门。当原色光线落在系统上时,对应于该原色的玻璃板将允许该特定光线通过。但是另外两块玻璃板不允许任何光线通过。因此,只有一个LDR会被触发,对应于该LDR的门输出将变为逻辑1以指示它是哪种颜色。类似地,当二次色光线落在系统上时,对应于混合色的两块原色玻璃板将允许该光线通过,而剩下的一块将不允许任何光线通过它。结果,两个LDR被触发,对应于这些的门输出将变为逻辑1并指示它是哪种颜色。
当所有LDR被触发或保持未触发时,您将分别观察到白光和黑光指示。可以仔细注意以下几点:
电位计VR1、VR2和VR3可用于调整LDR的灵敏度。
LDR的公共端应连接到正电源。
使用质量好的滤光片。
LDR安装在一个管子中,位于镜头后面,并对准物体。如图所示,彩色玻璃滤光片应固定在LDR前面。制作三个这样的并将它们固定在合适的情况下。调整很关键,小工具的性能将取决于其正确的制造和使用正确的过滤器以及光照条件
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
使用TCS230 TCS3200颜色传感器制作颜色检测器2023-02-13 793
-
分享一个不错的颜色传感器电路图2022-06-11 5190
-
光传感器/检测器,光传感器/检测器是什么意思2010-04-02 1595
-
集成电路图门限检测器电路图2009-07-02 1138
-
烟雾检测器电路图2009-06-30 1368
-
可燃气体检测器电路图2009-04-23 3440
-
带又温度传感器的过零检测器电路图2009-04-14 4015
-
小电容检测器电路图2009-04-11 1047
-
脉冲检测器电路图2009-04-09 1397
-
温度检测器电路图2009-04-03 2032
-
电平检测器电路图2009-04-01 2999
-
电流检测器电路图2009-03-28 1615
全部0条评论

快来发表一下你的评论吧 !
