

Hyperion 9自动驾驶的开放参考架构
描述
Hyperion 9:自动驾驶的开放参考架构
DRIVE Hyperion 9 是一个开放的下一代平台,围绕公司的 Atlan SoC 设计,用于智能驾驶和车内功能。它是 DRIVE Hyperion 系列汽车和自动驾驶汽车开发平台和参考架构中的最新产品,利用了来自大陆、海拉、Luminar、索尼和法雷奥等领先汽车供应商的内部和外部传感器套件。
其目标是加速 4 级自动驾驶特性和功能的设计
DRIVE Hyperion 参考平台的早期版本是2021 GTC 主题演讲的焦点,包括 12 个摄像头、12 个超声波传感器、9 个雷达和一个前置激光雷达,这些激光雷达由传感器抽象工具增强,允许自动驾驶汽车制造商定制他们的设计。
版本 9 建立在该传感器套件之上,具有:
环绕成像雷达
更新了具有更高帧速率的外部摄像头
两个额外的侧面激光雷达
超声波底盘传感器
三个内部摄像头和一个雷达用于占用感应
DRIVE Hyperion 9 自动驾驶传感器有效载荷现在共有 14 个摄像头、9 个雷达、3 个激光雷达和 20 个超声波。
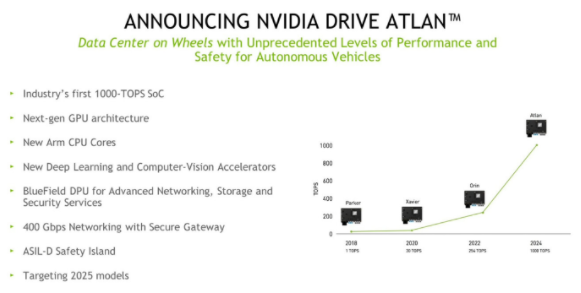
该架构的 Atlan SoC “大脑”能够达到 1,000 TOPS 的性能,并提供大于 100 的 SPECint 基准测试分数 (SPECrate2017_int)。得益于新的 GPU 架构、升级的 Arm CPU 以及深度学习和视觉加速器,这意味着在相同功耗下,性能比前几代产品提高了 4 倍。新的 SoC 还集成了 ASIL-D 级安全岛和 NVIDIA BlueField 数据处理单元 (DPU),用于在零信任部署中进行安全和加密工作负载处理。
总而言之,Atlan SoC 包含充足的计算能力,可以为支持 AI 的汽车运行冗余和多样化的 DNN,这些汽车可以扩展到未来。
NVIDIA 将于 2023 年开始在 Atlan SoC 上进行生产,DRIVE Hyperion 9 平台将于 2024 年进行开发,以部署到 2026 年的量产车辆中。幸运的是,该堆栈软件与现有的基于 Orin SoC 的 Hyperion 平台兼容,可将现有代码无缝移植到新参考架构的升级硬件上。
DRIVE 地图:从公路到云端再返回
除了本地 ADAS 功能之外,DRIVE Hyperion 平台预计实现 4 级以上自动驾驶的方式之一是通过创建地图。具体来说,NVIDIA DRIVE Map。
NVIDIA 将 DRIVE Map 定位为人工智能驱动的自动驾驶汽车的基础构建块。它是一个多模式地图引擎和平台,能够以超过 5 厘米的精度更新具有实时、真实世界路况(包括车道位置、障碍物等)的车辆地图。
当然,自动驾驶汽车的导航只与它的地图一样好,而地图也只与它们所基于的数据一样好。DRIVE Map 使用双管齐下的方法来收集地面实况,包括从当今道路上的车辆众包稀疏摄像头数据,并从配备 DRIVE Hyperion 平台的测绘车队获取详细的 3D 激光雷达和雷达数据,该平台计划测量超过到 2024 年,北美、欧洲和亚洲的道路将达到 300,000 英里。
这些输入用作创建 3D 导航地图的高清参考 (HDR),该功能部分基于NVIDIA 去年收购的DeepMap映射技术。如下图所示,这个过程包括使用深度神经网络来帮助创建自动地图,以及训练感知网络,这些网络使用标记的最新地图数据从云端重新部署到车辆上。
一种新的驾驶方式
NVIDIA 的 DRIVE Hyperion 9 和 DRIVE Map 实现了不可思议的类人传感功能。这些解决方案将释放车辆感知周围环境的能力,无论是从自己的道路传感器、周围的其他汽车还是云中收集数据。
此次 GTC22 汽车产品发布让我们得以一窥自由和安全性,这将很快促进从不干涉到不看路再到专心致志的转变。
审核编辑:郭婷
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8324
-
自动驾驶基础架构2023-06-01 716
-
NVIDIA DRIVE Hyperion树立自动驾驶汽车开发平台的安全里程碑2023-05-10 2358
-
详细说明多项自动驾驶底层软件技术2022-11-09 3849
-
NVIDIA DRIVE Hyperion 9 自动驾驶平台精彩问答分享2022-09-14 979
-
自动驾驶技术的实现2021-09-03 3205
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2422
-
自动驾驶OS市场的现状及未来 精选资料推荐2021-07-27 2516
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2885
-
如何让自动驾驶更加安全?2019-05-13 3723
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7525
-
自动驾驶的到来2017-06-08 7426
-
自动驾驶真的会来吗?2016-07-21 14473
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14196
全部0条评论

快来发表一下你的评论吧 !
