

 增量式PID算法在c代码部分的实现过程
增量式PID算法在c代码部分的实现过程
描述
stm32控制器下经常会用到对温度控制,适度控制,转速控制等需要自动控制相关的操作,因此在使用中需要不断提高对自动控制 原理部分的学习,一个好的自动控制系统包含三个 主要因素:稳,快,准。稳即系统的稳定性,快即系统的快速性,准即控制的准确性。
在自动控制中比例增益,积分时间,微分时间三个主要变量。下面就这三个变量进行动态展示。
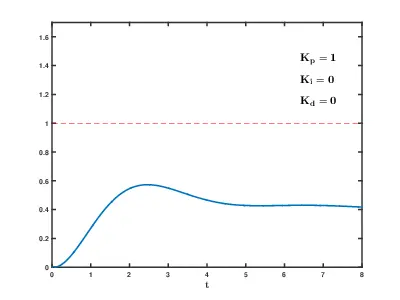
如上图所示,假设在单位阶跃响应下,比例控制幅值,kp越大值越高相关的,积分时间控制精确度,数值越大波形超调量越大,微分时间控制波形的平缓程度。
下面贴出增量式PID算法在c代码部分的实现过程。
//实现增量式PID算法
#include "stdio.h"
void pid_init();//PID参数初始化
float pid_realise(float speed);//实现PID算法
struct {
float set_speed;//设定速度
float actual_speed;//实际速度
float error;//偏差
float error_next;//上一个偏差
float error_last;//上上一个偏差
float kp,ki,kd;//定义比例,积分,微分参数
}pid;
int main()
{
pid_init();
int count = 0;
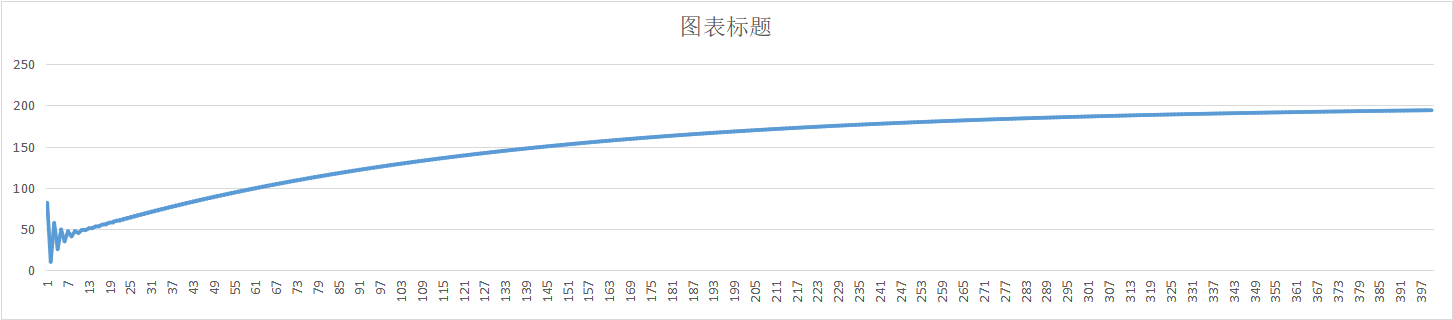
while(count<400)//进行400次 PID 运算,使初始值从0开始接近200.0
{
float speed = pid_realise(200.0);//设定值设定为200.0
printf("%f\n",speed);//输出每一次PID 运算后的结果
count++;
}
}
void pid_init()
{
pid.set_speed = 0.0;
pid.actual_speed = 0.0;
pid.error = 0.0;
pid.error_next = 0.0;
pid.error_last = 0.0;
//可调节PID 参数。使跟踪曲线慢慢接近阶跃函数200.0 //
pid.kp = 0.2;
pid.ki = 0.01;
pid.kd = 0.2;
}
float pid_realise(float speed)//实现pid
{
pid.set_speed = speed;//设置目标速度
pid.error = pid.set_speed - pid.actual_speed;
float increment_speed;//增量
increment_speed = pid.kp*(pid.error-pid.error_next)+pid.ki*pid.error+\
pid.kd*(pid.error-2*pid.error_next+pid.error_last);//增量计算公式
pid.actual_speed+= increment_speed;
pid.error_last = pid.error_next;//下一次迭代
pid.error_next = pid.error;
return pid.actual_speed;
}
运行数据得到图标如下 :
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
C语言增量式PID的通用算法2026-01-14 111
-
限时免积分下载:增量式与位置式PID算法的C语言实现分享2025-03-05 3448
-
PID控制算法的C语言实现2022-01-13 1584
-
如何去实现基于stm32的PID算法增量式程序呢2021-12-02 2380
-
使用C语言进行PID算法实现2021-09-15 1929
-
PID算法增量式算法2021-09-13 2225
-
使用单片机和Arduino实现增量式PID位置式PID算法和PID库免费下载2020-05-28 2131
-
如何使用免疫粒子群优化算法实现增量式的PID控制2019-11-01 1729
-
教你用C语言实现位置式PID和增量式PID2019-05-30 4695
-
位置型PID的C语言代码的实现过程详细资料概述2018-07-16 1490
-
增量式PID控制算法2016-04-01 969
-
浅析位置式PID与增量式PID算法2016-01-15 9005
全部0条评论

快来发表一下你的评论吧 !
