

准备好跳上自动驾驶汽车了吗
描述
安全是自动驾驶汽车的主要关注点。在不断运动中,他们对车辆环境的感知是工程师面临的最具挑战性的任务之一。
要了解所涉及的整个过程,让我们回顾一下决策通道(图 1)。这一切都始于各种传感器,这些传感器提供有关车辆周围环境以及车辆本身的信息。然后评估这些信息——障碍物检测、车道检测、位置、周围物体动态分析(例如前方汽车的速度),以及交通标志和路径优化。此信息有助于决定如何驱动车辆,并精确控制其位置和动态。
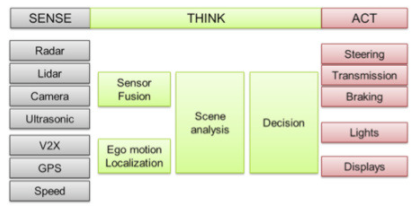
【图1 | 汽车中决策结构的功能划分。]
这个简化的过程意味着自动驾驶汽车面临的几个主要挑战。首先,该结构假设传感器信息在不同的关键功能之间共享,以生成统一且独特的车辆状态模型。换句话说,这假定了集中式计算架构,这是一种与今天的汽车完全不同的方法,其中功能聚集到隔离的计算单元中。其次,这种划分需要大量的计算能力。问题就在这里:这种集中的计算能力在为典型驾驶员提供自动驾驶功能的汽车中仍然不可用。
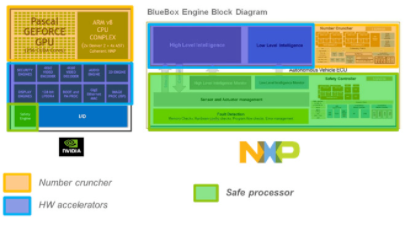
【图2 | ADAS 计算架构示例。]
如今,有几种潜在的计算架构,例如 NVIDIA PX Drive 2 和 NXP BlueBox(图 2)。这些平台包含一个称为“数字处理器”的并行计算部分,专门用于处理从传感器接收到的大量数据(橙色,图 2)。此外,硬件加速器提高了某些特定功能的性能。
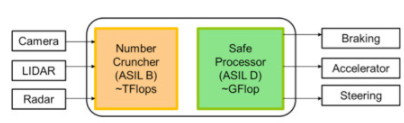
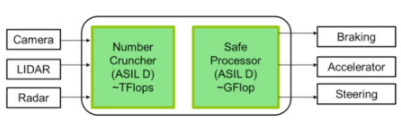
最后但并非最不重要的,也许是最关键的部分之一,“安全”处理器确保应用于汽车执行器的决定是在响应最高汽车认证级别(例如 ISO26262 ASIL-D)的单元中做出的。将图 1 的分区映射到这些架构中会导致类似于图 3 中所示的方案。使用传感器输入完成的密集数据处理由提供数个 TFlops 计算能力的数字处理器功能确保。该决定由具有某些 GFlops 计算能力的安全处理器应用。
【图3】
因此,命令由功能较弱的处理器发出,但具有强大的功能安全保证。问题是决策链的一部分具有较低级别的功能安全性。那么,如何评估整个系统呢?第一个解决方案可以是冗余(图 4)。然而,复杂性[2] 和成本影响很重要。
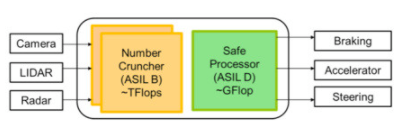
[图4]
另一种方法是提出故障解决方案,以保证数字运算部分的功能安全(图 5)。今天,一些技术和理论问题阻止了该解决方案在不久的将来可用。
【图5】
应考虑在算法级别工作,以减少相同功能的计算能力。如果我们可以将每个函数的复杂性降低 10、100 或 1,000 倍会怎样?这应该有助于将关键功能安装到已认证的处理器中,并让数字处理器确保互补功能。SIGMA FUSION 提出了一种有助于朝这个方向发展的算法。它解决了确保环境感知所需的距离传感器融合问题。它适合单个处理器,提供几 GFlops 的计算能力,相当于当今的汽车认证处理器。
审核编辑:郭婷
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4824
-
汽车自动驾驶技术2016-04-14 5599
-
[科普] 谷歌自动驾驶汽车发展简史,都来了解下吧!2016-10-25 4349
-
因为「不够安全」,我们就必须拒绝自动驾驶汽车上路?2017-04-08 3248
-
自动驾驶的到来2017-06-08 7472
-
迈向自动驾驶和电动汽车之路研讨会2018-10-25 3155
-
如何让自动驾驶更加安全?2019-05-13 3771
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2922
-
边缘计算在自动驾驶汽车的应用2021-07-12 1714
-
自动驾驶技术的实现2021-09-03 3254
-
小米平板3月底发布,你准备好了吗2016-12-20 5457
-
准备迎接未来交通:自动驾驶汽车3.02018-10-09 7914
-
5G即将开工 我们真的准备好了吗2019-01-11 4424
-
自动驾驶是否准备好了上路2020-01-13 912
-
图腾柱P F C来了,你准备好了吗?2022-11-03 1256
全部0条评论

快来发表一下你的评论吧 !
