

连接性使汽车定位更加精准
电子说
描述
尽管 CDNN 工具包等解决方案允许神经网络在嵌入式处理器上本地运行,但最有效的 AI 系统需要云连接。当连接到数据中心时,嵌入式设备在推理过程(目标应用人工智能模型概述的逻辑做出决策的过程)期间捕获的新信息或异常信息可以反馈到人工智能模型中,以随着时间的推移对其进行优化。
除此之外,ADAS 和自动驾驶用例中连接的主要应用是定位。例如,精密全球导航卫星系统 (GNSS) 现已在欧洲、俄罗斯和美国推出,可为 LDW 和 V2X 通信等应用提供低至厘米级的精度。
GNSS 系统精度的提高可归因于更新的误差建模技术,这些技术用于解释误差源,例如卫星轨道位置误差、卫星时钟误差以及电离层和对流层干扰。
为了抵消 GNSS 系统中的这些错误,私人纠错服务历来使用观察空间表示 (OSR)。在 OSR 中,双向通信链路用于将 GNSS 参考站的观测结果与基于现场 GNSS 接收器位置的距离相关误差结合起来(图 1)。然后将纠正后的错误作为一次性总和传送到目标平台,这限制了它们的准确性。
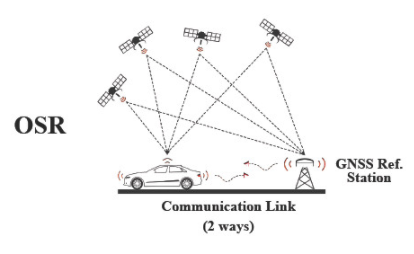
图 1.观测空间表示 (OSR) 误差建模技术需要 GNSS 参考站和与现场 GNSS 用户的双向通信。纠错是一次性提供的,从而降低了它们的准确性。
相比之下,状态空间表示 (SSR) 依赖于从卫星直接到单个 GNSS 接收器的单向广播,只有该接收器的观测结果才用于纠错(图 2)。在 SSR 实施中,纠错也作为单独的组件提供,它与单源观测相结合以产生前面提到的厘米级定位。
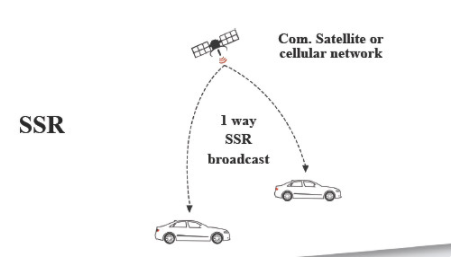
图 2.状态空间表示 (SSR) 误差建模消除了 GNSS 参考站,仅依赖于特定 GNSS 接收器的观测。误差校正作为单个组件提供,以提高定位精度。
多频段解决了多径问题
但就其所有好处而言,校正服务并未考虑卫星信号在通过环境时的反射或衍射引起的多径误差。为了克服汽车安全和其他需要精确单点定位 (PPP) 的应用中的挑战,u-blox 等供应商采用了多频段方法。
GNSS 卫星在不同频段传输信号,包括 GPS L1 (1575 MHz)、GPS L2 (1227 MHz) 和 GPS L5 (1176 MHz)。这在 PPP 的背景下是幸运的,因为每使用一个额外的频率,就可以从大气中消除更多的失真。
u-blox 的双频接收器将于 2018 年推出,利用这一现象。如图 3 所示,使用这种双频 GNSS 方法来消除多路径误差以及 SSR 校正服务可提供安全关键型应用所需的定位精度。
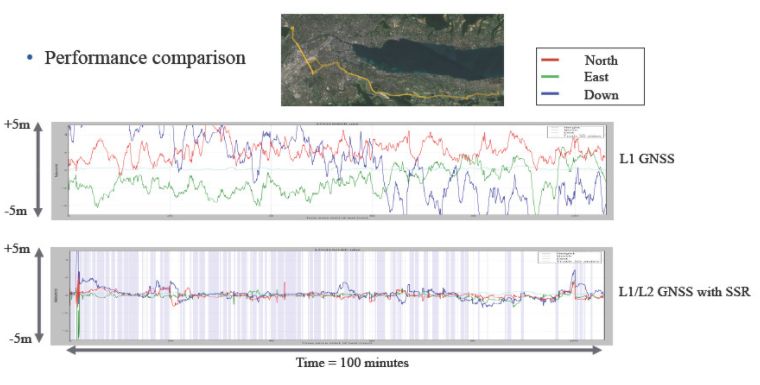
图 3.双频 GNSS 接收器和 SSR 纠错提供比现有解决方案更好的定位精度。
削减纠错成本将连接汽车
虽然高精度 GNSS 在某种程度上仍是一项利基技术,但 u-blox 预测该市场将在 2025 年成熟。然而,为了实现大众市场的采用,必须降低私有 GNSS 纠错服务的成本。
审核编辑:郭婷
-
车载定位器室内精准定位方案2018-02-26 7418
-
UWB定位技术使人员定位更精确2018-11-05 2451
-
线材测量软件的应用,测量更加精准2019-01-04 2959
-
UWB精准定位:让电厂更安全2020-07-30 1625
-
请问AD的定位怎么才能精准呢?2020-08-10 1787
-
CCD视觉定位系统在紫外激光打标机上的应用2022-03-08 1901
-
201494-2100、201495-2100、 2014952100、2014952100、莫仕MOLEX端子定位组件2023-08-02 4406
-
NXP照明方案更加精巧、可靠、耐用、高效2010-06-17 533
-
吉利汽车新款博瑞在北京正式亮相,整体效果更加精致2017-07-05 1829
-
Surface2拆解:更加精致的设计造诣2018-01-24 11079
-
特斯拉下款汽车将支持 Ultra Wideband 技术 智能手机解锁汽车时更加精准2021-02-03 2577
-
浪潮自研SSD使测试更全更加精准2022-01-04 2891
-
汽车数据连接的未来,看这里!2023-06-15 1731
-
精准又精细,厘米级定位让共享电单车更“聪明”2023-06-30 1118
-
单北斗定位终端的优势在哪些场景下更加凸显2024-08-21 1650
全部0条评论

快来发表一下你的评论吧 !
