

 HPM6750EVKMINI开发板生成coremark和FreeRTOS工程
HPM6750EVKMINI开发板生成coremark和FreeRTOS工程
电子说
1.4w人已加入
描述
1.前言
使用先楫,当然就是看上它的高性能,顺便了解了一下晶心D45内核,发现华人都有一个特点,要是掌握了一个mcu的设计精髓,就会尽量多的开掘出更高的性能,更强的外设,继续卷死在行业作威作福的lw。那么拿到先楫开发板,当然要跑跑分,顺便与一众芯片做做比较。
2.生成coremark工程
1.这次选择生成flash里面执行的工程。
> generate_project -b hpm6750evkmini -t flash_xip
2.使用SEGGER Embedded Studio编译下载,并运行。
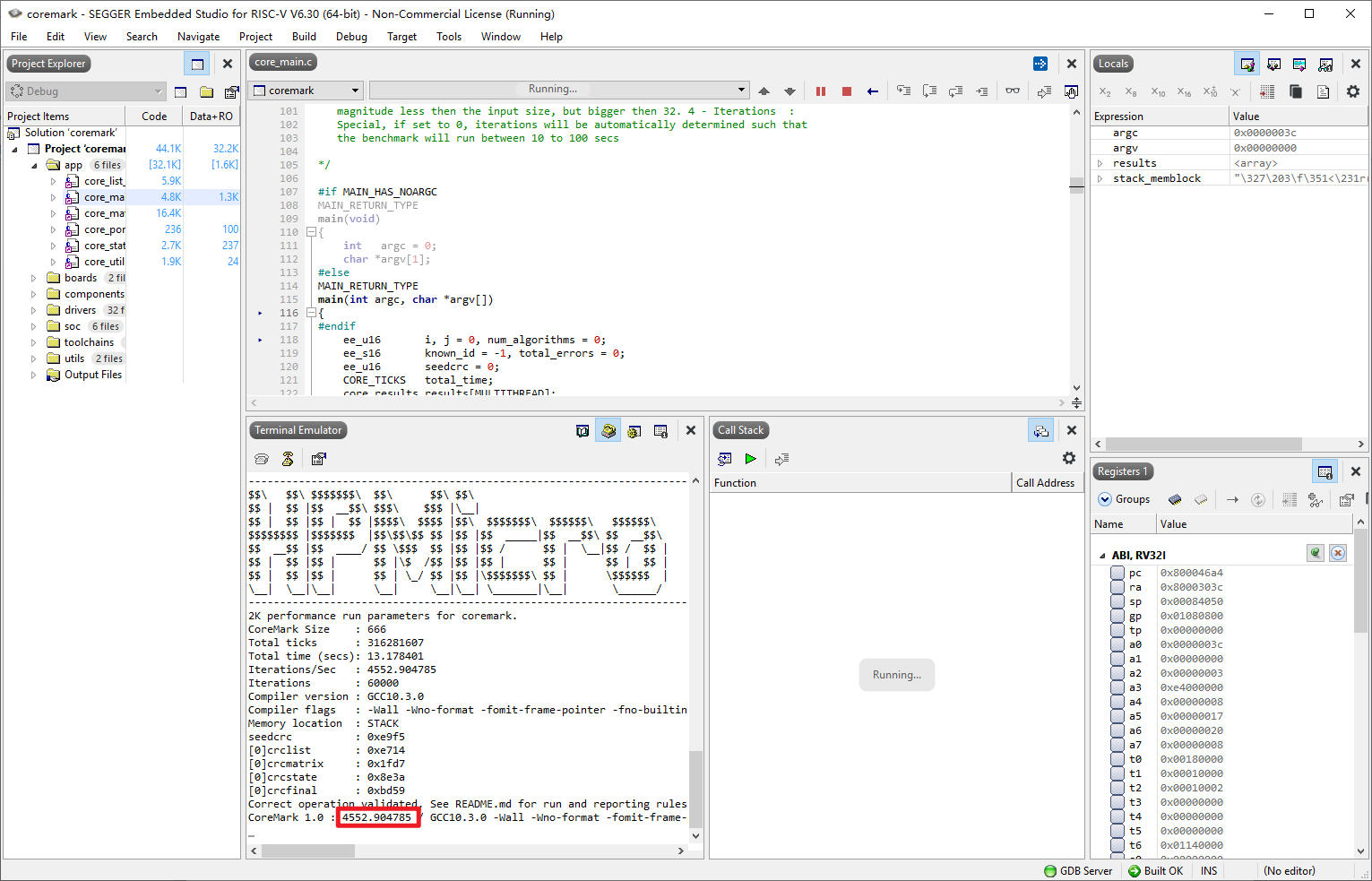
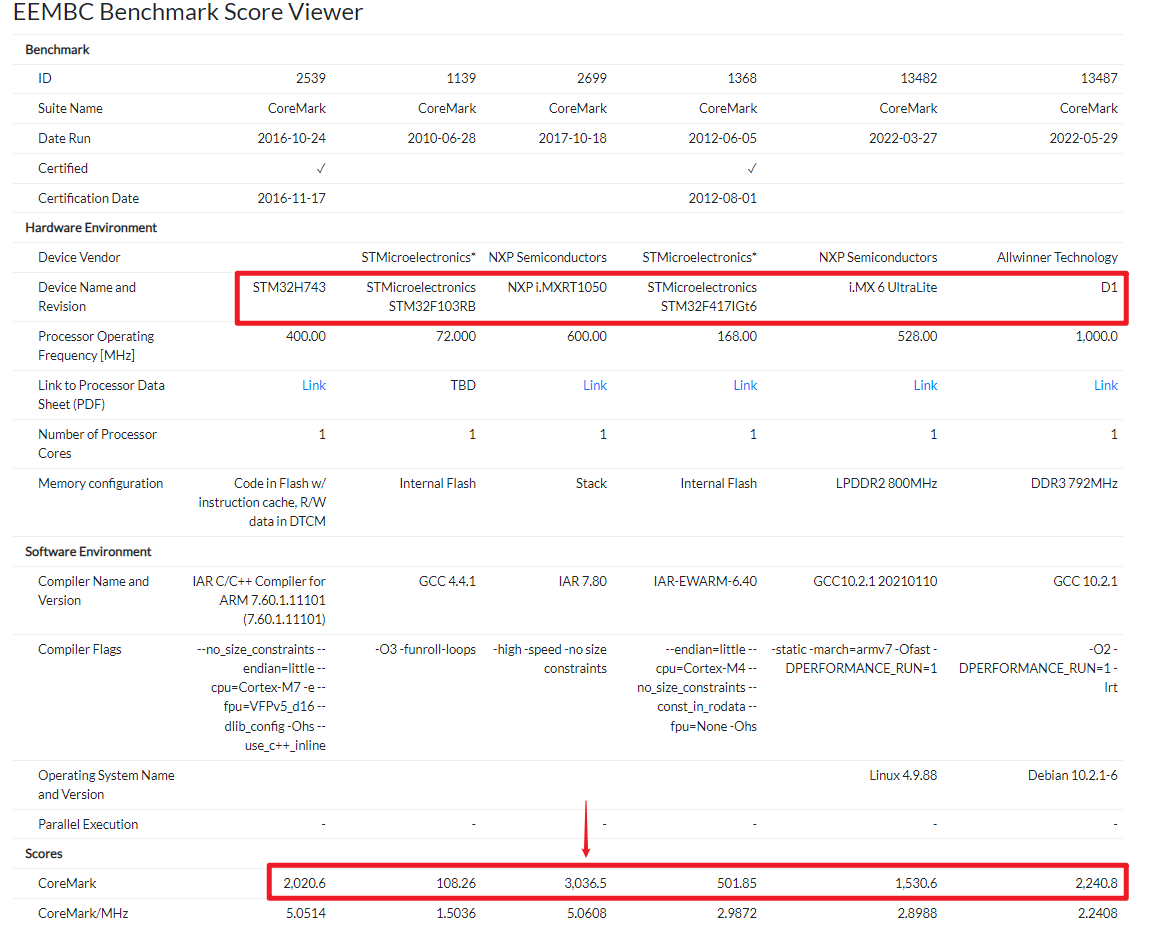
好家伙,单核跑出4553分,大家可能只看分数没啥概念,看看常用的芯片跑分对比:
rt1052能跑出3000多分,nxp官方都说是高性能,搞了很多跑分文章,看来已经被秒杀。
STM32F1只能跑出108分。
i.mx6ul跑出1500分。
呼声很高的全志D1可以跑出2240分。
相比之下,先辑这HPM6750可真够优秀的!!
有了这么高的性能,可以写比较复杂的计算或者控制程序了。
3.生成FreeRTOS工程
有了高性能还不够,需要加上RTOS,高性能才能被充分利用。仍然借助SDK例子。
start_cmd.cmd进入\sdk_env_v0.11.0\hpm_sdk\samples\rtos
> generate_project -b hpm6750evkmini -t flash_xip
4.代码分析
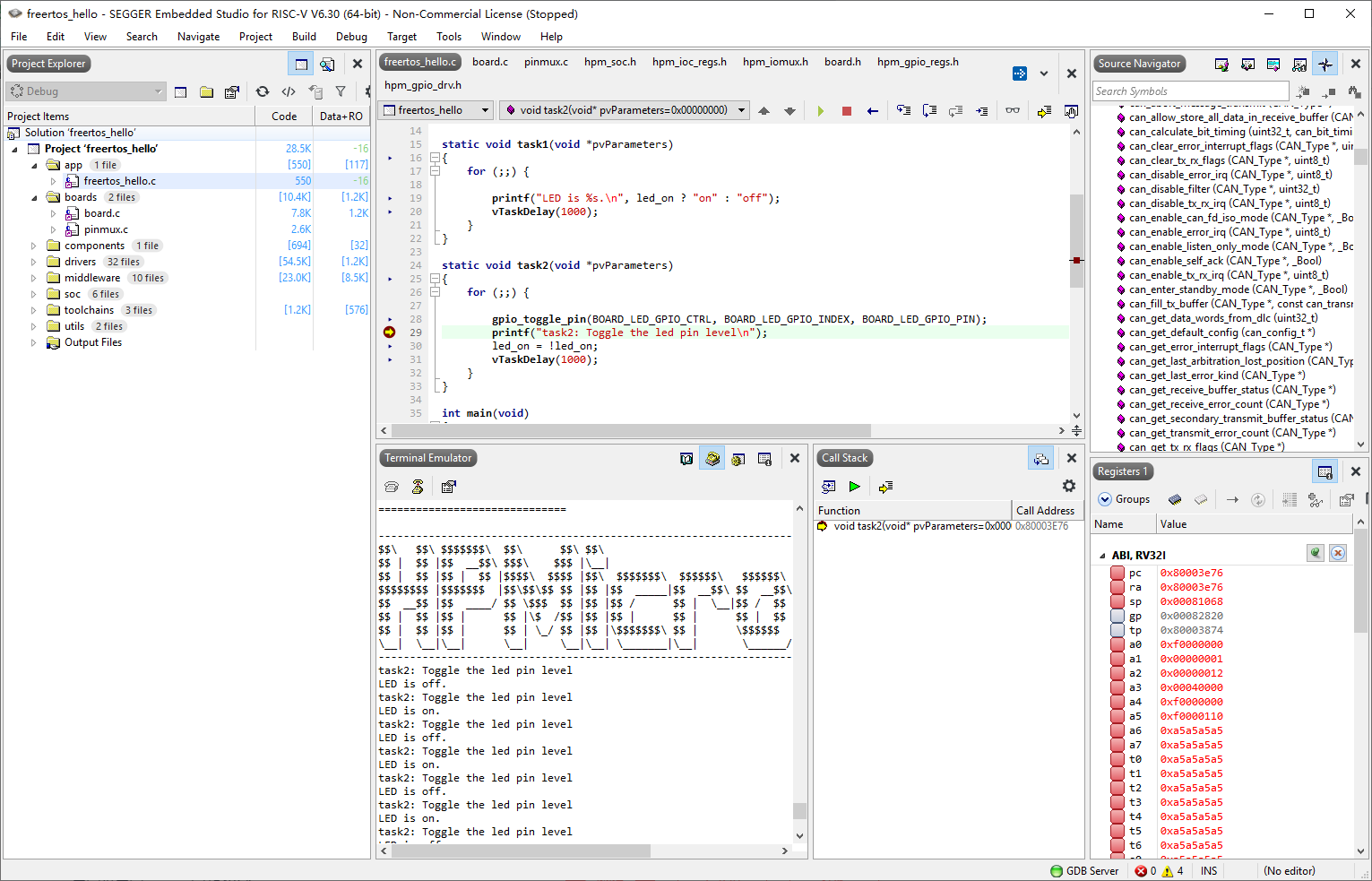
使用使用SEGGER Embedded Studio打开,并对代码进行简单修改。freertos建立task,运行task代码分析不再赘述。
#include "FreeRTOS.h"
#include "task.h"
#include
#include "board.h"
#include "hpm_gpio_drv.h"
#define task1_PRIORITY (configMAX_PRIORITIES - 5U)
#define task2_PRIORITY (configMAX_PRIORITIES - 4U)
volatile bool led_on;
static void task1(void *pvParameters)
{
for (;;) {
printf("LED is %s.\n", led_on ? "on" : "off");
vTaskDelay(1000);
}
}
static void task2(void *pvParameters)
{
for (;;) {
gpio_toggle_pin(BOARD_LED_GPIO_CTRL, BOARD_LED_GPIO_INDEX, BOARD_LED_GPIO_PIN);
printf("task2: Toggle the led pin level\n");
led_on = !led_on;
vTaskDelay(1000);
}
}
int main(void)
{
board_init();
board_init_gpio_pins();
gpio_set_pin_output(BOARD_LED_GPIO_CTRL, BOARD_LED_GPIO_INDEX, BOARD_LED_GPIO_PIN);
gpio_write_pin(BOARD_LED_GPIO_CTRL, BOARD_LED_GPIO_INDEX, BOARD_LED_GPIO_PIN, BOARD_LED_ON_LEVEL);
led_on = true;
if (xTaskCreate(task1, "task1", configMINIMAL_STACK_SIZE + 256U, NULL, task1_PRIORITY, NULL) != pdPASS) {
printf("Task1 creation failed!.\n");
for (;;) {
;
}
}
if (xTaskCreate(task2, "task2", configMINIMAL_STACK_SIZE + 256U, NULL, task2_PRIORITY, NULL) != pdPASS) {
printf("Task2 creation failed!.\n");
for (;;) {
;
}
}
vTaskStartScheduler();
for (;;) {
;
}
return 0;
}
这里顺便分析一下gpio的初始化方法:
/**************************************************************
主要分析一下main函数中的gpio初始化函数
***************************************************************/
board_init_gpio_pins();
/**************************************************************
函数原型在board.c中定义
***************************************************************/
void board_init_gpio_pins(void)
{
init_gpio_pins();
}
//borad.c中定义
void init_gpio_pins(void)
{
uint32_t pad_ctl = IOC_PAD_PAD_CTL_PE_SET(1) | IOC_PAD_PAD_CTL_PS_SET(1);
/* Green LED*/
HPM_IOC->PAD[IOC_PAD_PB18].FUNC_CTL = IOC_PB18_FUNC_CTL_GPIO_B_18;
HPM_IOC->PAD[IOC_PAD_PB18].PAD_CTL = pad_ctl;
}
/**************************************************************
寄存器配置宏命令
***************************************************************/
/*
* PS (RW)
*
* pull select
* 0: pull down
* 1: pull up
*/
#define IOC_PAD_PAD_CTL_PS_MASK (0x800U)
#define IOC_PAD_PAD_CTL_PS_SHIFT (11U)
#define IOC_PAD_PAD_CTL_PS_SET(x) (((uint32_t)(x) << IOC_PAD_PAD_CTL_PS_SHIFT) & IOC_PAD_PAD_CTL_PS_MASK)
#define IOC_PAD_PAD_CTL_PS_GET(x) (((uint32_t)(x) & IOC_PAD_PAD_CTL_PS_MASK) >> IOC_PAD_PAD_CTL_PS_SHIFT)
/*
* PE (RW)
*
* pull enable
* 0: pull disable
* 1: pull enable
*/
#define IOC_PAD_PAD_CTL_PE_MASK (0x10U)
#define IOC_PAD_PAD_CTL_PE_SHIFT (4U)
#define IOC_PAD_PAD_CTL_PE_SET(x) (((uint32_t)(x) << IOC_PAD_PAD_CTL_PE_SHIFT) & IOC_PAD_PAD_CTL_PE_MASK)
#define IOC_PAD_PAD_CTL_PE_GET(x) (((uint32_t)(x) & IOC_PAD_PAD_CTL_PE_MASK) >> IOC_PAD_PAD_CTL_PE_SHIFT)
/**************************************************************
寄存器地址
***************************************************************/
/* IOC base address */
#define HPM_IOC_BASE (0xF4040000UL)
/* IOC base pointer */
#define HPM_IOC ((IOC_Type *) HPM_IOC_BASE)
/**************************************************************
寄存器结构体定义
***************************************************************/
typedef struct {
struct {
__RW uint32_t FUNC_CTL; /* 0x0: ALT SELECT */
__RW uint32_t PAD_CTL; /* 0x4: PAD SETTINGS */
} PAD[492];
} IOC_Type;
/**************************************************************
gpio复用定义
***************************************************************/
/* IOC_PB18_FUNC_CTL function mux definitions */
#define IOC_PB18_FUNC_CTL_GPIO_B_18 IOC_PAD_FUNC_CTL_ALT_SELECT_SET(0)
#define IOC_PB18_FUNC_CTL_UART1_CTS IOC_PAD_FUNC_CTL_ALT_SELECT_SET(3)
#define IOC_PB18_FUNC_CTL_CAN1_RXD IOC_PAD_FUNC_CTL_ALT_SELECT_SET(7)
#define IOC_PB18_FUNC_CTL_DAOL_N IOC_PAD_FUNC_CTL_ALT_SELECT_SET(10)
#define IOC_PB18_FUNC_CTL_DRAM_DQ_25 IOC_PAD_FUNC_CTL_ALT_SELECT_SET(12)
#define IOC_PB18_FUNC_CTL_PWM1_P_1 IOC_PAD_FUNC_CTL_ALT_SELECT_SET(16)
#define IOC_PB18_FUNC_CTL_XPI_SLV_ADQ_31 IOC_PAD_FUNC_CTL_ALT_SELECT_SET(30)
可见,risc-v处理器的寄存器配置套路是非常清楚的,和arm思路相同,步骤大同小异~~~~~
使用ide进行debug运行上述代码,截图如下:
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
HPM6750支持硬件串口空闲中断检测吗?2023-09-05 1686
-
HPM6750EVKmini微控制器使用手册2023-06-05 711
-
HPM6750EVK/HPM6750EVKMINI调试失败的原因及其解决办法2023-05-26 1720
-
【先楫半导体HPM6750EVKMINI评估板试用体验】一、开箱&amp;开发环境搭建2022-11-18 4523
-
HPM6750EVKMINI开发板原理图2022-10-21 1282
-
【先楫半导体HPM6750EVKMINI评估板试用体验】先楫半导体HPM6750EVKMINI评估板开发环境搭建--软件篇2022-06-27 2251
-
【先楫半导体HPM6750EVKMINI评估板试用体验】先楫半导体HPM6750EVKMINI评估板开箱2022-06-26 5951
-
【先楫半导体HPM6750EVKMINI评估板试用体验】三、coremark跑分测试2022-06-25 2816
-
【先辑半导体HPM6750EVKMINI评估板试用体验】##2:coremark跑分与FreeRTOS2022-06-19 6093
-
【先楫半导体HPM6750EVKMINI评估板试用体验】开箱视频2022-06-02 3648
-
【先楫半导体HPM6750EVKMINI评估板试用体验】一、开箱&开发环境搭建2022-05-28 5852
-
【RISC-V专题】先楫半导体HPM6750EVKMINI评估板免费试用2022-04-14 4687
-
HPM6750EVKMINI 硬件设计资料2022-04-01 730
全部0条评论

快来发表一下你的评论吧 !
