

 传统CAN总线与CAN FD帧格式的区别
传统CAN总线与CAN FD帧格式的区别
电子说
描述
当汽车工业进入发展阶段时,CAN 总线已经开始以其能够提供的广泛功能应用于该行业。它在具有以非常合理的成本同时拥有相当多的优秀特性,很快就成为了目前使用的核心通信协议。但是,随着时间的推移,技术发展已超过了 CAN总线的功能。越来越多的技术先进的电子模块有不断增加的数据要求,这就需要更加灵活的总线协议支持。当越来越多的CAN总线功能开始变得不足时,就需要一个新的解决方案。此外,随着数据和带宽需求的爆炸式增长,仅通过增加更多的CAN总线也是行不通的。因此,作为一种新的解决方案,博世在2011-2012年开发并发布了对原始CAN总线协议的扩展,称为 CAN 灵活数据速率(CAN Flexible Data Rate ISO 11898-1:2015中规定)
CAN FD 实际上是一种功能更强大的 CAN。灵活的信号传输为汽车电子通信提供了更高的带宽和所有所需的功能,而且成本效益很高。此外,它提供了几乎所有 CAN 总线功能的升级,是能够满足更高级数据和带宽要求的更好选择。
传统 CAN 2.0总线的许多特点,使得其在 ECU 数量较多、带宽利用率较低的应用情况下,可作为一个理想的选择。
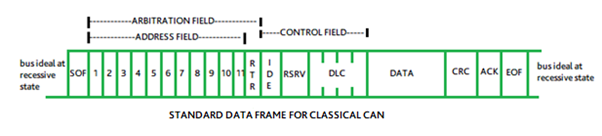
传统 CAN 总线支持每帧8字节的最大信息有效载荷,最大数据速率为1Mbps。另外,标准/扩展的 CAN 2.0A分别允许11比特/29比特的数据传输。而CAN FD支持灵活的信息有效载荷在2Mbps,5Mbps和8Mbps的数据速率下,每帧的信息有效载荷范围为0、8、12、16、20、24、32、48、64字节。
传统 CAN 总线与 CAN FD 的帧格式看起来似乎没有太大的区别。但是在 CAN FD 帧格式中,有一些在传统 CAN 总线中不存在的添加字段。
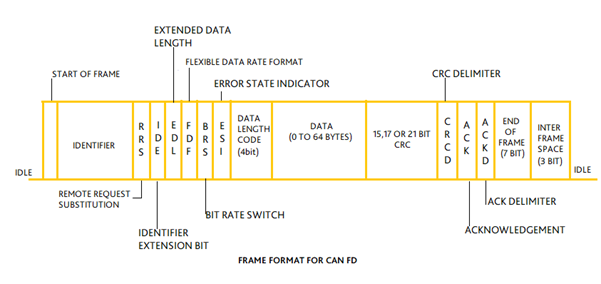
RRS:远程请求替换(始终为显性 0)。CAN FD 完全不支持远程帧。(在经典的 CAN 中,有 RTR(远程传输请求)用于识别数据帧和远程帧)
FDF:灵活数据速率格式(始终为隐性 1),用于指示灵活数据帧格式的使用。
EDL:扩展数据长度(始终为隐性 1),用于在 CAN FD 中管理更大的有效载荷和更快的比特率。
BRS:比特率开关有助于确定数据帧的比特率。
• Dominant 0 表示CAN FD 数据帧的仲裁速率高达1Mbit/sec。• 隐性 1 表示 CAN FD 数据帧的仲裁速率更高/更快,范围高达 5Mbit/sec。
ESI:错误状态指示器
显性 0 表示错误激活模式。
隐性 1 表示错误被动模式。
DLC:Data Length Code 是 CAN FD 中的 4 位代码,表示帧中的数据字节数。(DLC 值范围从 1001 到 1111,用于指定 12、16、20、24、32、48 和 64 字节的数据长度)。
CRC:循环冗余校验的长度为 17 位,用于最多 16 字节的数据,或 21 位用于 20-64 字节。它的长度取决于 EDL 和 DLC 位的长度。CAN FD 始终使用 4 个固定填充位来提高通信的可靠性。
将此类字段添加到 CAN FD 使其能够相应地满足汽车行业的需求。它在汽车通信中的应用主要是需要在更短的时间内以更高的速度传输更多的数据。人们可以使用相同的带宽来积累更多的数据。此外,就像传统的 CAN 总线一样,CAN FD 也有许多优点:
• 多个 ECU 之间的通信效率和速度提高了30倍• 通过先进的 CRC减少了未检测到的错误数量• 可在较快和较慢的数据速率之间灵活切换• 允许单个报文搭载更多的数据• 提高了网络带宽• 提高了协议效率• 降低了协议损耗• 更好的可靠性• 简化处理• 可向下兼容
CAN FD 早在几年前就已经存在,并且现在仍被汽车行业所采用。CAN FD 相对于传统 CAN 总线的显著优势是向后兼容性,使其能够与使用传统 CAN 总线的电路一起使用。但是,如果考虑汽车技术的发展速度,很明显 CAN FD 将被证明是传统 CAN 的更好替代品。CAN FD 的主要优点是能够使用较少的带宽以更高的速度传输灵活的数据,使其与众不同且更为强大。
Influx 为您带来 ReXgen 和 Rebel CT4 CAN FD,配备 2 条 CAN FD 总线。这使用户能够以灵活的数据速率发送更多信号。
审核编辑:汤梓红
-
如何从传统的CAN用法中设置CAN-FD?2025-04-14 3447
-
一文浅析汽车CAN-FD总线的通信应用2023-02-14 1456
-
CAN FD的七个技术问题资料总结2018-09-27 1604
-
串口数据转CAN帧格式详解2019-02-02 16550
-
CANOpen系列教程04 _CAN总线波特率、位时序、帧类型及格式说明2020-03-06 9929
-
can总线一帧多少字节多少位_MCU扩展CAN/CAN FD接口方案MCP2518FD+ATA65632021-10-29 1816
-
浅谈CAN FD总线协议帧格式2022-10-14 4918
-
一文搞懂CAN总线协议帧格式和CAN FD总线协议帧格式2022-10-17 5629
-
可以混合使用Classical CAN格式和CAN FD格式的诊断报文吗?2022-12-05 2275
-
CAN FD帧结构介绍2023-07-18 10834
-
can数据帧的标准格式2023-12-01 6902
-
请问用CAN存储器存储的CAN总线数据帧格式有哪些呢?2024-01-31 2843
-
CAN FD盒基本功能包括哪些2024-07-02 2112
-
CAN/CAN FD/CAN XL三大总线协议解读,是逐步替代关系吗?2024-08-12 7910
-
CAN FD与传统CAN的区别是什么2024-10-22 3064
全部0条评论

快来发表一下你的评论吧 !
