

 SiPM,车载激光雷达的下一块拼图
SiPM,车载激光雷达的下一块拼图
电子说
1.4w人已加入
描述
激光雷达作为一种利用激光测量速度、位置与距离的传感器,已经广泛应用于机器人、无人机、L2级别以上汽车等产品中,甚至是作为主要传感器的存在。要按不同的技术来分类的话,激光雷达可以从扫描方式、发射方式等角度分成多个大类。
探测器是激光雷达接收端的核心组件之一,在dToF激光雷达中,主要用于接收返回的脉冲激光并将其转化为电流,随后用于测距等计算。以所用光电探测器的种类不同,目前主要分为PMT(光电倍增管)、PD(Pin光电二极管)、APD(雪崩光电二极管)、SPAD(单光子雪崩二极管)、SiPM(硅光电倍增管)这几种类型。
对于汽车激光雷达而言,APD在技术成熟度上更高,依然占据主流方案,但随着激光雷达对探测距离要求的提高,这一器件开始看向增益更高的SPAD与SiPM。
高出主流方案几个数量级的增益
要说增益能力的话,SPAD和SiPM绝对是称霸光电探测器的。毫无增益的PD切不论,单凭APD数十数百的增益,是完全无法与以106为数量级的SPAM与SiPM相提并论的。这也是为何SiPM拥有更高的光子探测效率(PDE)的原因,这一参数和激光功率决定了激光雷达的探测距离,而后者是由发射端的激光器决定的。
RDM系列SiPM / 安森美
电子发烧友网就SiPM的优势采访了安森美中国汽车市场现场应用经理陈力,他补充道:除了高增益外,SiPM的工作电压也显著小于上百伏的APD,同时对电压波动和温度变化的敏感度也远小于APD。因为SiPM是模拟器件,温度变化会导致工作点迁移,理想输出值应该只受激光强度影响,但温度漂移会恶化输出的线性特性,通常产品需要标定和补偿温漂的影响。
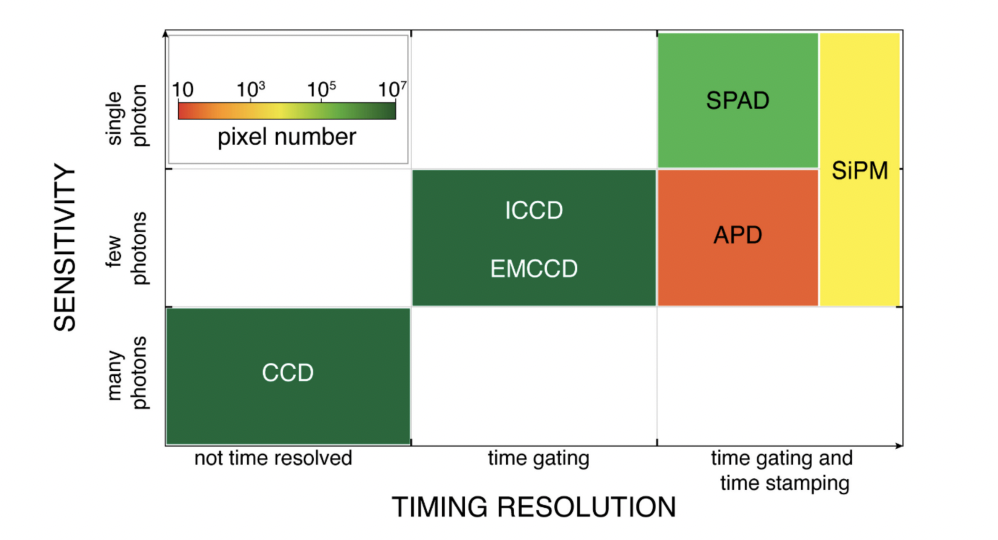
不同探测器参数对比 / 米兰理工大学
除此之外,像素数量也是SiPM的重要指标之一。作为由SAPD阵列并联组成的光电探测器,SiPM的像素数量标识了该感光芯片可以支持同时扫描的线数。芯片像素越多,高分辨率激光雷达需要集成的感光芯片越少,可以降低系统设计复杂度和成本。
至于SPAD与SiPM的选择,陈力也给出了自己的观点,他表示,一般SPAD有更高的灵敏度,其输出是二值化的0或1,判断是否感知到激光;SiPM的灵敏度相对低一些,但其输出能区分激光强度的大小。二者在产品中体现了灵敏度和输出动态范围的不同平衡点。因此在两者的选择上,更多是看激光雷达厂商自己的权衡。
不同波长下的选择
在现有的SiPM产品中,我们在详细参数中看到都是在等于或低于905nm波长的表现,作为目前激光雷达最常选用的波长,以此作为标准确实没问题,但SiPM在其他波长下,比如另一常用近红外光波长1550nm下的表现如何呢?这就与SiPM本身的材料有关了,我们从“硅”光电倍增管这个名字就知道这一组件是基于何种材料了。陈力解释道,SiPM作为硅基传感器,一般只会感知波长小于1000nm的红外光。所以常用905nm下的PDE作为衡量标准。
安森美中国汽车市场现场应用经理 陈力
正因如此,如果厂商打造的是基于1550nm波长下的激光雷达,还是得用其他的非硅基的光电探测器,比如基于InGaAs或是InP的SPAD。但我们在上文中提到了激光功率是决定探测范围的另一大因素,而1550nm的激光雷达可以做到更高的功率,所以探测距离上占优,不过相对应的成本也会高出来一些。这对比汽车本身的成本可能不算什么,可随着车载激光雷达数目的增多,整车自动驾驶系统的价格就会高出不少了。
谈到1550nm的光源就不得不提及广泛使用它的FMCW激光雷达,大家对FMCW激光雷达的前景极为看好,不过目前商用量产的却少之又少。陈力认为,dToF激光雷达技术更成熟,成本相对较低,但抗干扰能力弱一些。FMCW激光雷达要调制激光,光源控制复杂,需要更强的算法计算能力,整体系统成本高。这两大技术路线各有特点,都在向更好性价比的方向发展。
结语
市面上常见的主要还是做SPAD的探测器厂商较多,目前也有一些厂商在往SiPM上发力,比如安森美、滨松、博通、灵明光子、京邦科技等等,但正如激光雷达本体和其它汽车零部件一样,做到车规认证才是进入汽车市场的敲门砖,否则主要应用场景还是在无人机、机器人、医疗设备和AR/VR上。而激光器、探测器则需要通过AEC-Q102这一车规认证,目前SiPM探测器中已公开通过该认证的似乎也只有安森美去年发布的ARRAYRDM产品。
尽管转向SPAD和SiPM已经是dToF激光雷达探测器未来的大势所趋,两者在性能上都高于主流的APD方案,但在总成本上以及生产设计成熟度上,都还有进一步改善的空间。再考虑到本身激光雷达各大技术路线都存在分歧,短时间也很难确定谁是笑到最后的方案。
打开APP阅读更多精彩内容
探测器是激光雷达接收端的核心组件之一,在dToF激光雷达中,主要用于接收返回的脉冲激光并将其转化为电流,随后用于测距等计算。以所用光电探测器的种类不同,目前主要分为PMT(光电倍增管)、PD(Pin光电二极管)、APD(雪崩光电二极管)、SPAD(单光子雪崩二极管)、SiPM(硅光电倍增管)这几种类型。
对于汽车激光雷达而言,APD在技术成熟度上更高,依然占据主流方案,但随着激光雷达对探测距离要求的提高,这一器件开始看向增益更高的SPAD与SiPM。
高出主流方案几个数量级的增益
要说增益能力的话,SPAD和SiPM绝对是称霸光电探测器的。毫无增益的PD切不论,单凭APD数十数百的增益,是完全无法与以106为数量级的SPAM与SiPM相提并论的。这也是为何SiPM拥有更高的光子探测效率(PDE)的原因,这一参数和激光功率决定了激光雷达的探测距离,而后者是由发射端的激光器决定的。
RDM系列SiPM / 安森美
电子发烧友网就SiPM的优势采访了安森美中国汽车市场现场应用经理陈力,他补充道:除了高增益外,SiPM的工作电压也显著小于上百伏的APD,同时对电压波动和温度变化的敏感度也远小于APD。因为SiPM是模拟器件,温度变化会导致工作点迁移,理想输出值应该只受激光强度影响,但温度漂移会恶化输出的线性特性,通常产品需要标定和补偿温漂的影响。
不同探测器参数对比 / 米兰理工大学
除此之外,像素数量也是SiPM的重要指标之一。作为由SAPD阵列并联组成的光电探测器,SiPM的像素数量标识了该感光芯片可以支持同时扫描的线数。芯片像素越多,高分辨率激光雷达需要集成的感光芯片越少,可以降低系统设计复杂度和成本。
至于SPAD与SiPM的选择,陈力也给出了自己的观点,他表示,一般SPAD有更高的灵敏度,其输出是二值化的0或1,判断是否感知到激光;SiPM的灵敏度相对低一些,但其输出能区分激光强度的大小。二者在产品中体现了灵敏度和输出动态范围的不同平衡点。因此在两者的选择上,更多是看激光雷达厂商自己的权衡。
不同波长下的选择
在现有的SiPM产品中,我们在详细参数中看到都是在等于或低于905nm波长的表现,作为目前激光雷达最常选用的波长,以此作为标准确实没问题,但SiPM在其他波长下,比如另一常用近红外光波长1550nm下的表现如何呢?这就与SiPM本身的材料有关了,我们从“硅”光电倍增管这个名字就知道这一组件是基于何种材料了。陈力解释道,SiPM作为硅基传感器,一般只会感知波长小于1000nm的红外光。所以常用905nm下的PDE作为衡量标准。
安森美中国汽车市场现场应用经理 陈力
正因如此,如果厂商打造的是基于1550nm波长下的激光雷达,还是得用其他的非硅基的光电探测器,比如基于InGaAs或是InP的SPAD。但我们在上文中提到了激光功率是决定探测范围的另一大因素,而1550nm的激光雷达可以做到更高的功率,所以探测距离上占优,不过相对应的成本也会高出来一些。这对比汽车本身的成本可能不算什么,可随着车载激光雷达数目的增多,整车自动驾驶系统的价格就会高出不少了。
谈到1550nm的光源就不得不提及广泛使用它的FMCW激光雷达,大家对FMCW激光雷达的前景极为看好,不过目前商用量产的却少之又少。陈力认为,dToF激光雷达技术更成熟,成本相对较低,但抗干扰能力弱一些。FMCW激光雷达要调制激光,光源控制复杂,需要更强的算法计算能力,整体系统成本高。这两大技术路线各有特点,都在向更好性价比的方向发展。
结语
市面上常见的主要还是做SPAD的探测器厂商较多,目前也有一些厂商在往SiPM上发力,比如安森美、滨松、博通、灵明光子、京邦科技等等,但正如激光雷达本体和其它汽车零部件一样,做到车规认证才是进入汽车市场的敲门砖,否则主要应用场景还是在无人机、机器人、医疗设备和AR/VR上。而激光器、探测器则需要通过AEC-Q102这一车规认证,目前SiPM探测器中已公开通过该认证的似乎也只有安森美去年发布的ARRAYRDM产品。
尽管转向SPAD和SiPM已经是dToF激光雷达探测器未来的大势所趋,两者在性能上都高于主流的APD方案,但在总成本上以及生产设计成熟度上,都还有进一步改善的空间。再考虑到本身激光雷达各大技术路线都存在分歧,短时间也很难确定谁是笑到最后的方案。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达分类以及应用2017-09-19 8730
-
常见激光雷达种类2017-09-25 13816
-
激光雷达面临的机遇与挑战2017-09-26 6582
-
激光雷达究竟为什么这么牛,这么贵2017-10-16 7002
-
消费级激光雷达的起航2017-12-07 7302
-
固态设计激光雷达2018-01-25 8383
-
激光雷达2021-01-17 20003
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30166
-
昂贵的价格仍是车载激光雷达最大的发展障碍2017-02-04 2873
-
自动驾驶中车载激光雷达是什么?2021-02-19 13638
-
智能电车系列之车载雷达“激光雷达”2023-01-17 2796
-
激光雷达的主要应用场景 车载激光雷达的特点2023-02-06 4489
-
比起全面的车载激光雷达,工业激光雷达更加专一2023-04-14 3965
-
激光雷达,价格打到一千块/台?2023-08-08 4093
-
SPAD席卷车载激光雷达市场2025-06-13 5072
全部0条评论

快来发表一下你的评论吧 !
