

 rt-thread 驱动篇(八)hwtimer 重载算法优化
rt-thread 驱动篇(八)hwtimer 重载算法优化
描述
硬件定时器
区别于 rt-thread 内核实现的两种定时器,这种定时器依赖芯片内置的定时器外设,依靠稳定高速的晶振实现精确定时,可以实现 rt_timer 无法达到的定时精度。硬件定时器最重要的两个参数是定时器时钟和定时器重载值。
定时器时钟越高,定时器精度越高;重载值越大,实现的定时时间越长。
在定时器时钟一定的前提下,重载值就决定了定时器定时时间的准确性。
两种计算重载值算法
hwtimer.c 文件 `timeout_calc` 函数实现
float overflow;
float timeout;
rt_uint32_t counter;
int i, index = 0;
float tv_sec;
float devi_min = 1;
float devi;
/* changed to second */
overflow = timer->maxcnt/(float)timer->freq;
tv_sec = tv->sec + tv->usec/(float)1000000;
if (tv_sec < (1/(float)timer->freq))
{
/* little timeout */
i = 0;
timeout = 1/(float)timer->freq;
}
else
{
for (i = 1; i > 0; i ++)
{
timeout = tv_sec/i;
if (timeout <= overflow)
{
counter = timeout*timer->freq;
devi = tv_sec - (counter/(float)timer->freq)*i;
/* Minimum calculation error */
if (devi > devi_min)
{
i = index;
timeout = tv_sec/i;
break;
}
else if (devi == 0)
{
break;
}
else if (devi < devi_min)
{
devi_min = devi;
index = i;
}
}
}
}
timer->cycles = i;
timer->reload = i;
timer->period_sec = timeout;
counter = timeout*timer->freq;
return counter;
第二种实现,
rt_uint32_t counter, reload;
rt_uint32_t timer_cnt;
int i, index = 0, n0, n1;
float tv_sec;
rt_uint32_t dev, dev_min;
/* changed to second */
tv_sec = tv->sec + tv->usec/(float)1000000.0;
timer_cnt = tv_sec * timer->freq;
if (timer_cnt == 0) {
timer_cnt = 1;
}
if (timer_cnt < timer->maxcnt) {
timer->cycles = timer->reload = 1;
timer->period_sec = tv_sec;
counter = timer_cnt;
return counter;
}
if (timer_cnt % timer->maxcnt == 0) {
timer->cycles = timer->reload = timer_cnt / timer->maxcnt;
timer->period_sec = tv_sec;
counter = timer_cnt;
return counter;
}
n0 = timer_cnt / timer->maxcnt + 1;
n1 = timer_cnt / 2;
dev_min = n0;
for (i = n0; i < n1; i++) {
reload = (rt_uint32_t)(timer_cnt / i);
dev = timer_cnt - reload * i;
if (dev == 0) {
// end
index = i;
break;
} else if (dev < dev_min) {
dev_min = dev;
index = i;
}
}
timer->cycles = timer->reload = index;
timer->period_sec = index / timer->freq;
counter = timer_cnt / index;
return counter;
测试环境
定时器频率设定 1M。定时器最大重载值 65535。
系统:win10
IDE:Qt Creator
最大定时范围
两种算法,最主要的差别在于前一种用 float 运算,因为 float 可以表达的值范围更大,定时时间可以更长。
而在 1M 定时器时钟前提下,用 32 位无符号整型 timer_cnt,最大可以处理时间仅有 4294.967295s。
精度 PK

这里不支持嵌入 html 表格,只好贴图了
分别选各个量级的时间,用两种算法计算,第二种算法可以把误差降低到0,但是也暴露出一些问题,在某些时间,例如 3.230970s、12.230970s、14.230970s... 误差是很小,定时器重载值也很小,这是我们不愿意看到的。
第一种算法,在计算大于 1000 的数时,误差也随之增大。比如 1000s 误差为 3.236ms;4293.0s 误差为 64.080ms。
运算速度 PK
测试方法:抽取某几个时间值,循环 1M 次运算,计量 1M 次运算总耗时时间。
| time | float | uint32 |
| 3.317s | 98.736ms | 3000+s |
| 7.537s | 178.545ms | 21.921ms |
| 7.000537s | 168.549ms | 175.530ms |
| 999.999s | 17407.468ms | 30866.978ms |
| 999.000999s | 17458.347ms | 337.047ms |
从抽取的几个值测试结果看,第一种算法耗时比较稳定,第二种算法对不同值的运算时间差异很大。特别的,3.317s 这个值用第二种算法,1M 次运算总耗时时间可能达到 3000s。
从上一小节的精度比对可以看出,第二种算法对精度要求太高了。下面降低第二种算法的精度,达到和第一种一样的精度再重复一次。修改代码如下
if (dev == 0) {
// end
index = i;
break;
} else if (dev > dev_min) {
break;
} else if (dev < dev_min) {
dev_min = dev;
index = i;
}
再次测试结果:
| time | float | uint32 |
| 3.317s | 104.720ms | 20.945ms |
| 3.000317s | 91.728ms | 21.941ms |
| 7.537s | 179.519ms | 21.941ms |
| 7.000537s | 168.549ms | 20.944ms |
| 999.999s | 17480.734ms | 27.927ms |
| 999.000999s | 17366.539ms | 20.944ms |
我们可以看出来,在相同精度条件下,第二种算法的运算速度比第一种快很多,而且耗时反而变得更集中。
其实,对结束条件再次修正,将 `dev == 0` 的严苛误差条件换成 `dev <= 1` 也不会出现上面 3000+s 慢速。
if (dev <= 1) {
// end
index = i;
break;
} else if (dev > dev_min) {
break;
} else if (dev < dev_min) {
dev_min = dev;
index = i;
}
超过 4295s 的超长定时
需要修改 `rt_uint64_t timer_cnt` 的定义为 64 位无符号整型 `rt_uint64_t timer_cnt` 。
又因为定时时间很长很长,对误差要求可以降低一些,对第二种算法做的第二处修改:
if (dev <= 500) {
// end
index = i;
break;
} else if (dev < dev_min) {
dev_min = dev;
index = i;
}
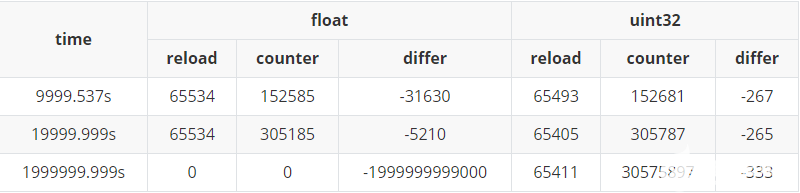
超长时间,第二种算法的表现也很优秀。第三组数据第一种方法竟然出错了,没算出结果。
下面是 10k 次(没有进行 1W 次是因为有些时间太长了)运算时间统计
| time | float | uint32 |
| 9999.537s | 1741.341ms | 5.010ms |
| 19999.999s | 3481.173ms | 27.926ms |
| 1999999.999s | - | 2616.001ms |
返璞归真
以上是对两种算法从不同角度进行的比对测验。看似用 float 可以计算更大的定时数,但是,测试结果并不那么理想。使用 64位整型数计算,可能得到比用 float 更精确的结果。
使用 32 位无符号整型数运算虽然最大定时时间只有 4294.9s 。但是我们也看到了,第一种方法有可能出现计算误差的,当误差超过 1ms 我们用 rt_thread_mdelay 或者 rt-thread 的软/硬定时器,可能结果比硬件定时器更精确了,反而失去了精确定时器的意义。在这个前提下,使用 32 位无符号整型数已经足够了。
算法及测试源码见: https://gitee.com/thewon/rt_thread_repo/tree/master/user
审核编辑:汤梓红
-
RT-Thread驱动开发指南进阶篇-动手驱动先楫未适配的外设LCD2024-02-25 6061
-
《RT-Thread设备驱动开发指南》基础篇--以先楫bsp的hwtimer设备为例2024-02-24 3990
-
RT-Thread设备驱动开发指南基础篇—以先楫bsp的hwtimer设备为例2024-02-20 4220
-
RT-Thread使用未默认启用的timer作为硬件定时器HWTIMER的步骤2023-07-19 3788
-
RT-Thread ssd1306驱动2023-04-21 266707
-
RT-Thread文档_RT-Thread 简介2023-02-22 1180
-
【原创精选】RT-Thread征文精选技术文章合集2022-07-26 11713
-
RT-Thread NUC97x 移植 LVGL2022-07-08 2352
-
RT-Thread记录(一、版本开发环境及配合CubeMX)2022-06-20 7820
-
RT-Thread驱动篇:hwtimer重载值算法2022-04-01 3035
-
rt-thread驱动资料下载2022-03-24 3240
-
RT-Thread Studio驱动SD卡2021-12-27 1679
-
RT-Thread编程指南2015-11-26 2398
全部0条评论

快来发表一下你的评论吧 !
