

 Realsense+大象机器人手眼标定方案详解
Realsense+大象机器人手眼标定方案详解
电子说
描述
踩坑
手眼标定的算法网上是比较多的,但是很多都不好用。github上高赞的easy_handeye,试了一下,但是mycobot600没有提供moveit的配置,而我ROS基础不是很好,不太会修改示例代码。折腾了一段时间最终看到这个鱼香ROS,最终得到了不错的结果
1.配置
配置过程就不用说了,参考鱼香ROS
用深度相机的话需要安装深度相机的库github
需要控制机械臂还需要安装ROS库,参考博客
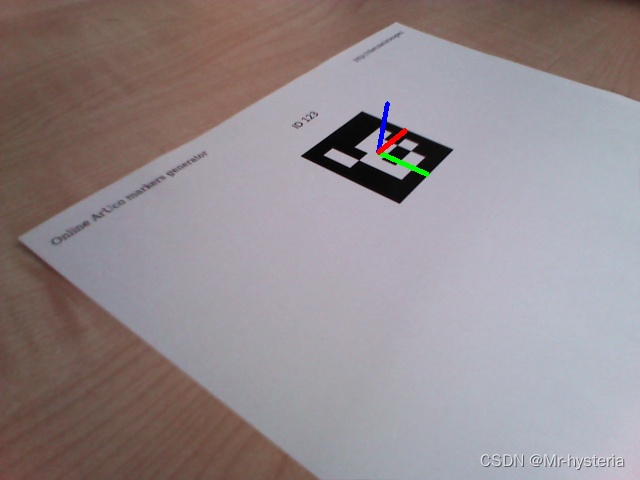
识别二维码需要安装aruco_ros
特别说明一些,鱼香ROS配置的时候,安装的opencv应该是pip3去安装的。配置过程可能有许多问题,百度解决即可
2.在线标定
用在线标定的方式比较简单,不用自己去配置姿态信息。
2.1启动相机
该launch文件已经把启动realsense的代码写入了,直接运行就好。
roslaunch handeye-calib aruco_start_realsense_sdk.launch
自己可以修改相机的参数,比如分辨率,帧率
其中分辨率不是随便改的,可以启动realsense-viewer查看相机支持的分辨率有哪些
realsense-viewer
2.2启动机械臂及通信
# 启动rviz
roslaunch mycobot_600 mycobot_600_slider.launch
# 启动通讯
rosrun mycobot_600 slider_600.py
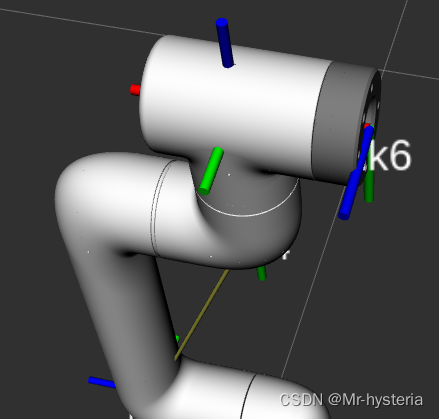
Rviz中的坐标,可以看出,基底坐标是base,末端坐标是link6

2.3启动手眼标定程序
修改src/handeye-calib/launch/online/online_hand_on_eye_calib.launch中的参数后,运行:

roslaunch handeye-calib online_hand_on_eye_calib.launch
3.标定精度
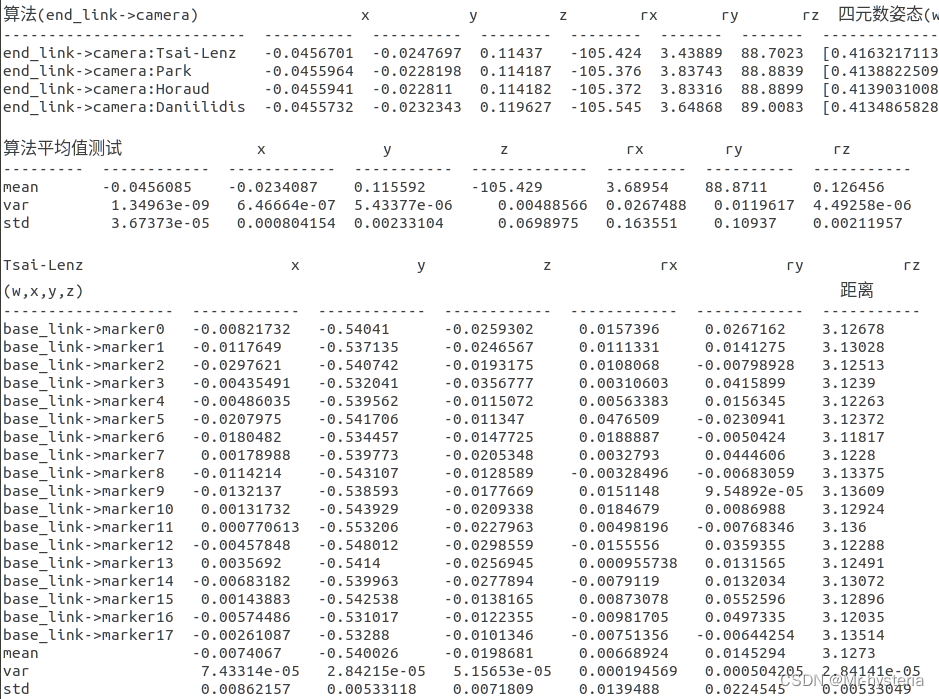
相机与link5之间的坐标变化才是不变的
眼在手上的时候,板子与基座之间的变化是固定的,因此可以看他们的标准差来判断是否精确。std预计需要0.005以下才行
aruco码隔的近效果好,因此尽量使相机与二维码近一点,可以使用较小的二维码
多个角度拍摄
总结:多角度,小距离。(上下左右,左上,右上,左下,右下。)每个位置拍摄两组或者三组(末端尽量不动,其他关节进行组合)。效果还行,如下:
其他:
打开rviz可以清楚的看到有几个坐标及名称还有tf树之间坐标的关系(大象机器人是base..link6)
以下代码可以查看坐标之间的变化矩阵:rosrun tf tf_echo base link5
XYZ---红、绿、蓝色(rviz中)
numpy.linalg.LinAlgError: Eigenvalues did not converge(这个报错是因为自己拍摄的拍摄的照片以及数据存在很大问题)
眼在手上可以看base->marker的标准差(std),越稳定越好
审核编辑:符乾江
-
机器视觉手眼标定2017-11-06 1561
-
NI VISION 与机器人做引导2018-04-09 4819
-
如何使用labview实现手眼标定2019-04-22 4638
-
请问各位高手,如何用labview的vision实现手眼标定2020-05-28 2343
-
超声电机—机器人手指关节的应用2020-09-28 2762
-
CMAC网络在机器人手眼系统位置控制中的应用2006-03-24 1686
-
高级机器人手册2015-12-10 599
-
凸松弛全局优化机器人手眼标定2017-12-03 1120
-
手眼标定_全面细致的推导过程2020-07-11 7174
-
详解机器人手眼标定MATLAB及C++实现2022-11-25 4700
-
机器人手眼标定的推导过程2023-04-20 3635
-
手眼标定的详细推导过程2023-07-11 4187
-
常见的机器人视觉伺服中的标定技术有哪些2023-08-04 1428
-
机器人手眼标定技术你真的懂吗?2024-03-18 2004
-
助力风电行业!深视智能SR7400线激光以机器人手眼标定实现风力叶片切割引导2024-07-27 1327
全部0条评论

快来发表一下你的评论吧 !
