

数字化工厂丨汽车焊装车间三维扫描解决方案
描述
一、项目背景
当前我国产业升级换代加快,国内化工厂及企业需要对厂房进行改造扩建,需要拆除、更换、新增大量的设备和管线。而改扩建设计质量的关键取决于对现状的了解程度,现场情况复杂,给设计带来了很大难度,所以如何获取到准确的工厂现状资料就是第一个要解决的问题。
手工测量是传统获取现场资料的最常见并且最经济的方法,但工厂的改造设计是在不停工的前提下进行的,运行时很多区域是人员危险区,不能靠近测量。而且人工测量的误差也往往难以避免,测量的结果不能满足设计的基本要求。我们需要将目光转向更先进和准确的三维激光测量方式。
二、项目要求:
1.汽车焊装车间主焊线现状三维数据采集;
2. 汽车焊装车间地板主线现状三维数据采集;
3. 扫描数据处理要求:
(1)扫描测站拼接精度小于2毫米,且必须提交拼接报告(xml格式)。
(2)扫描数据可进行自动提取几何模型,提取机器人底座,可拾取机器人底座轴线。
(3)扫描数据轻量化处理,方便数据在CATIA、ROBACAD、PD/PS等软件中迅速打开。
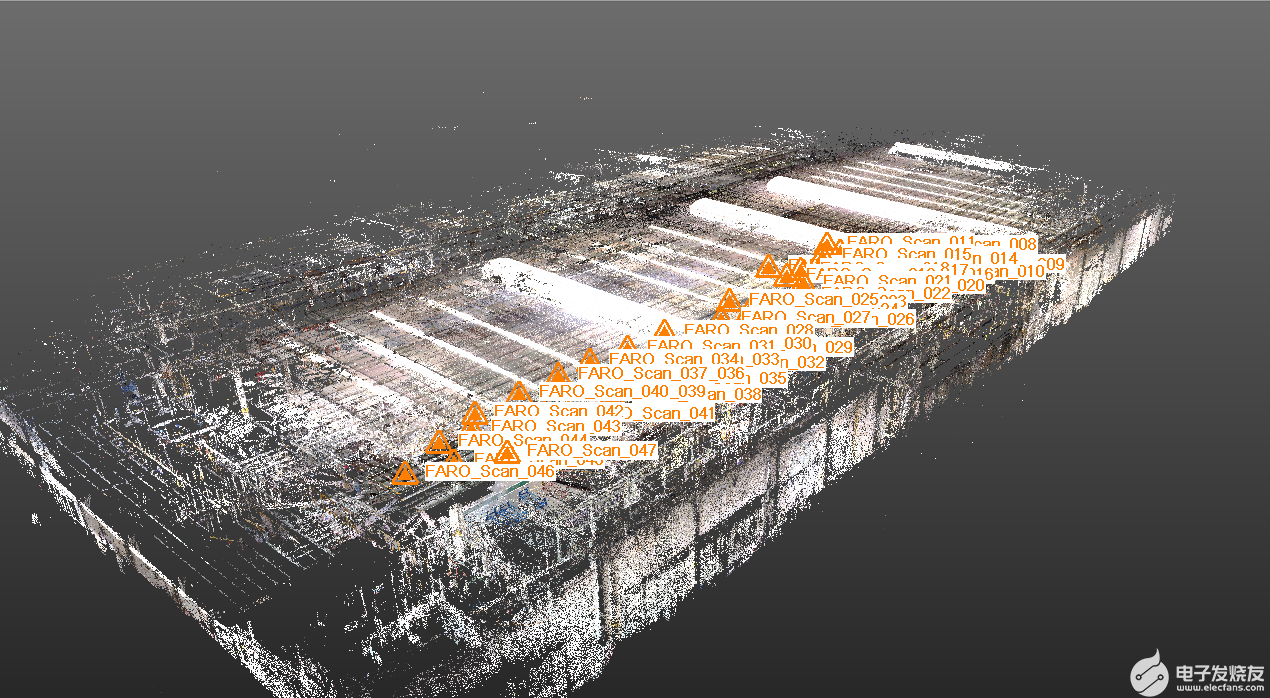
三、获取精准的现场数据
为了得到完整的俩条焊装车间线路的整体数据,利用美国FARO最新的S系列三维激光扫描仪 FARO Focus S350对汽车焊装车间进行完整的现场数据采集:
四、数据处理
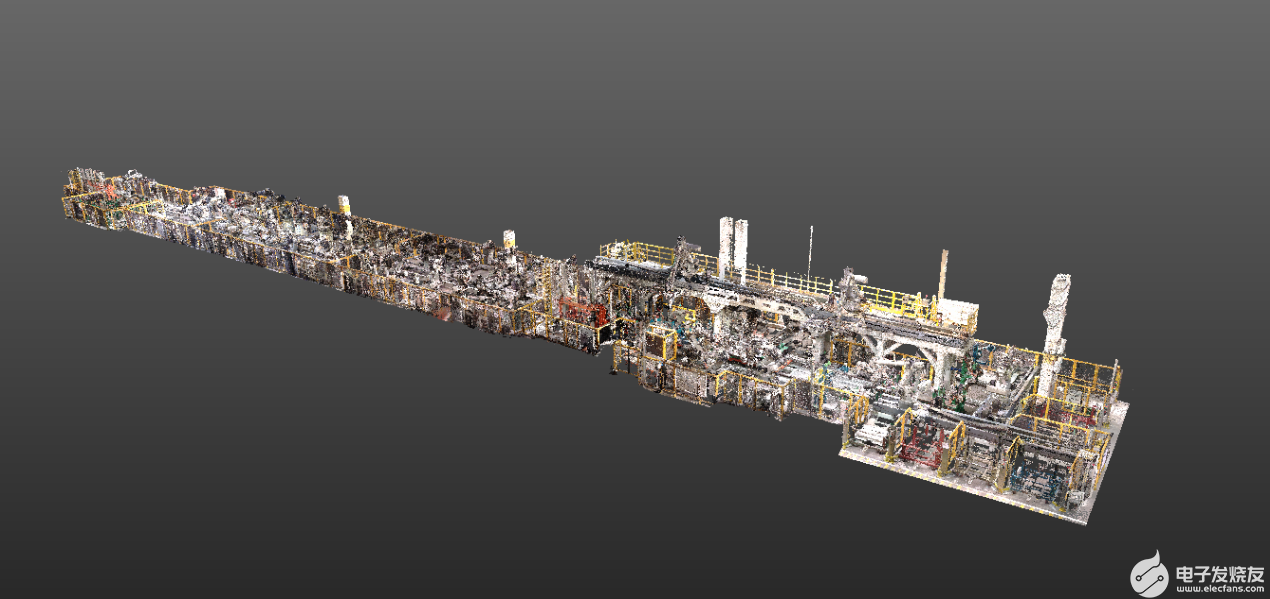
1. 将扫描的每一站数据导入到Trimble Realworks进行自动拼接并建立点云模型,然后去除噪点留下我们所要的车间工厂模具点云模型。
2. 去除多余燥点
3.一条焊装线完整的三维点云
4.提取中轴线 将点云文件导入cyclone中,进行准确的中轴线和底座模型提取。
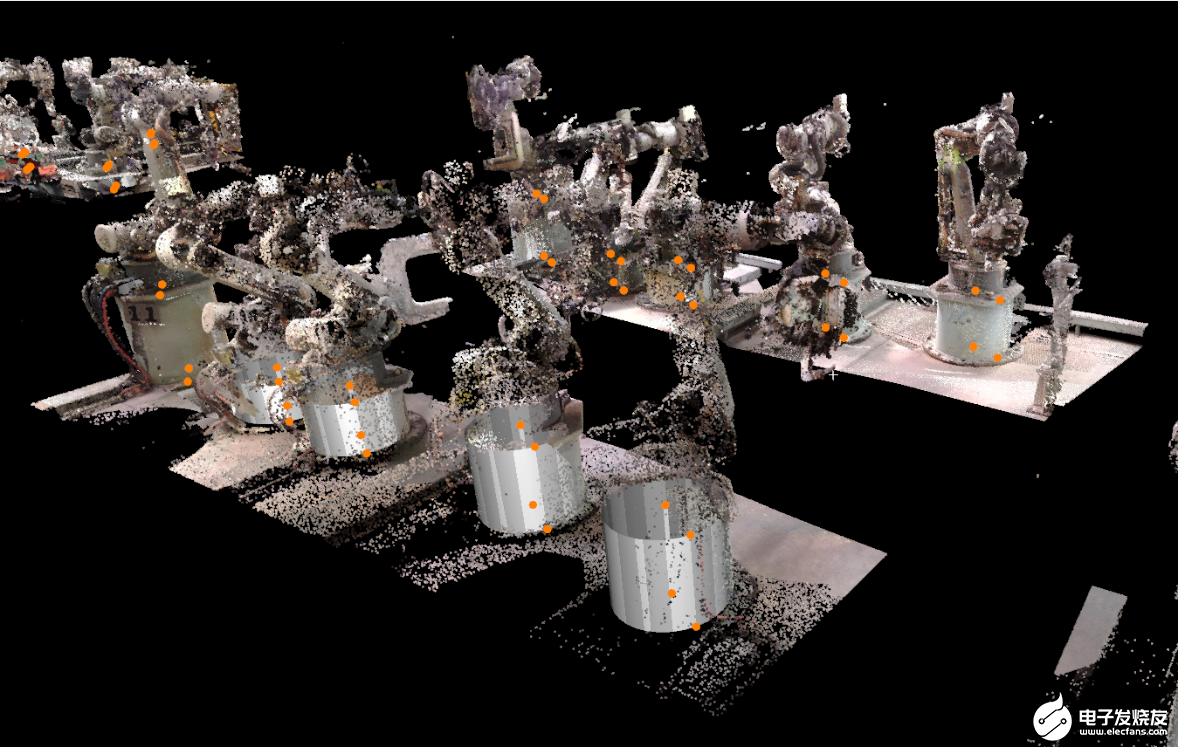
5.提取的中轴线效果
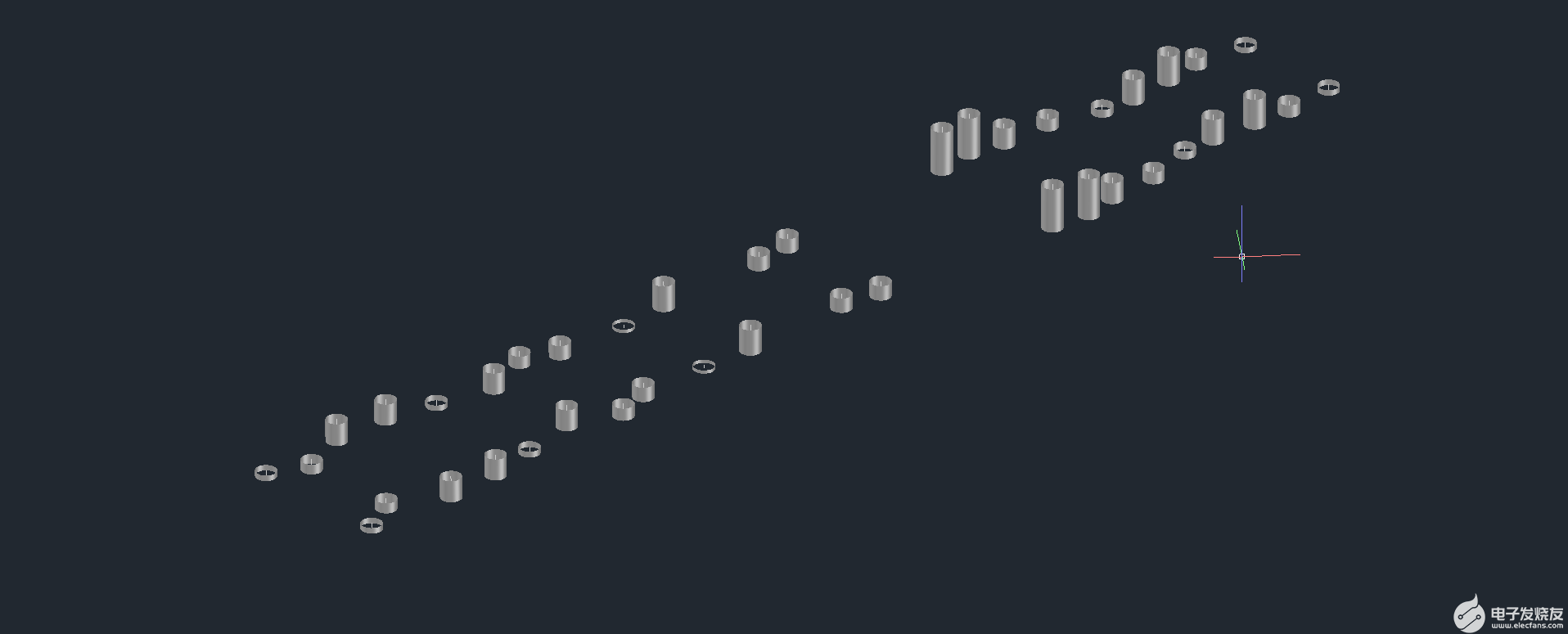
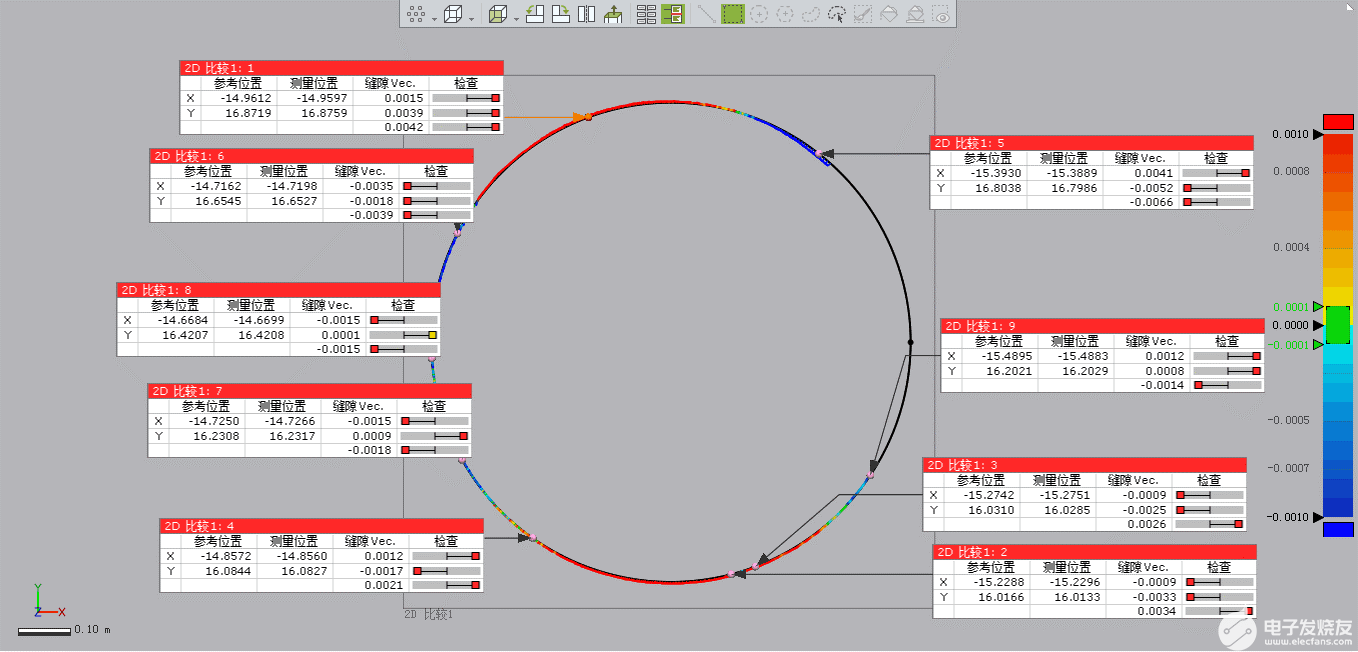
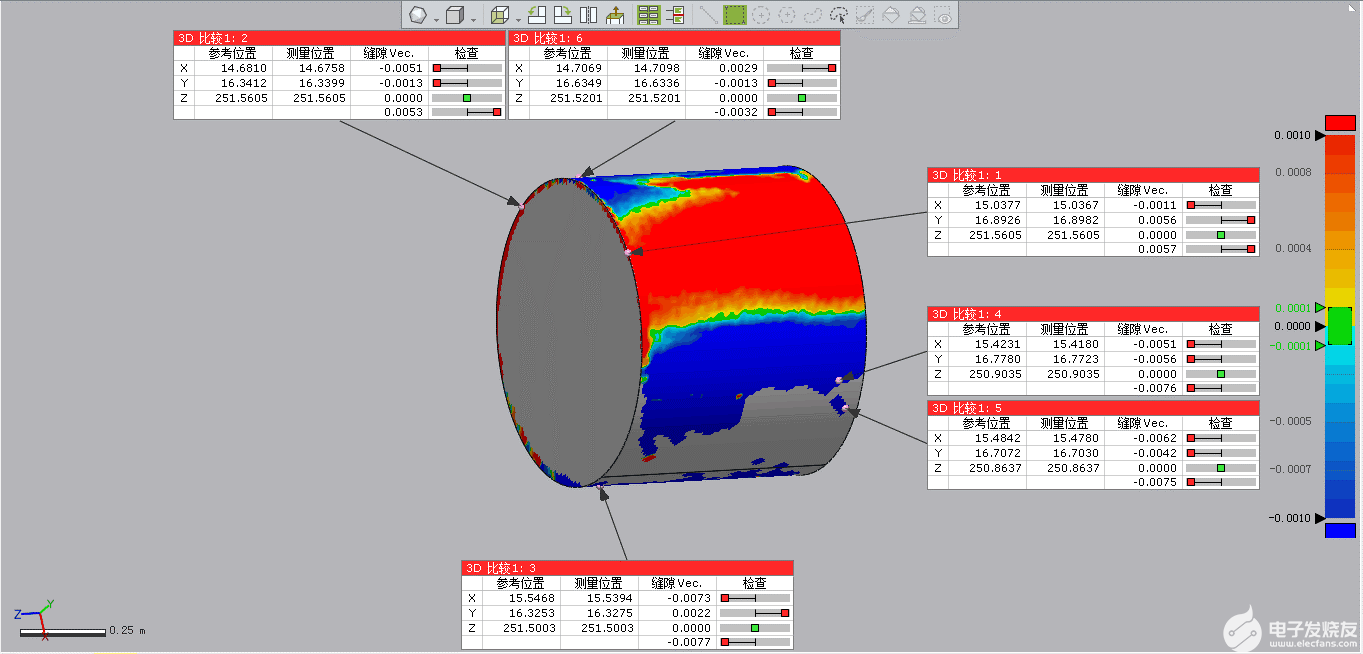
6.对比中轴线和点云之间的误差
将提取好的模型导入对比软件Control X 中进行中轴线和点云的对比(2D、3D)
五、总结
工厂改造新建质量的好坏关键取决于对现场数据获取的精准程度,应用三维激光扫描技术,使我们能够得到完全真实的汽车焊装车间的三维数据。再应用高效的点云处理平台以一种全新的设计模式进行工厂的改扩建设计。大大提高了改建效率,并且能够得到更精确的成果
审核编辑:符乾江
-
泰来三维|数字化工厂_煤矿三维扫描数字化解决方案2024-05-29 915
-
工业数字化工厂解决方案2024-04-29 1100
-
三维扫描服务项目-工厂三维扫描建模2024-04-26 1160
-
泰来三维|三维扫描助力变电站数字化建设2023-08-22 1716
-
三维扫描在数字化工厂建设中的应用2023-08-02 948
-
乐华车间工位机数字化工厂的应用2023-07-03 1035
-
泰来三维激光扫描服务 三维扫描古建筑案例分享2023-03-31 2909
-
三维激光扫描仪:三维扫描工厂车间建模2022-10-17 4054
-
Handyscan汽车三维扫描服务尺寸检测的应用2020-08-04 1653
-
MetraSCAN三维扫描仪对汽车钣金件三维扫描检测解决方案2020-07-15 1647
-
焊装车间三维数字化三维激光扫描仪是先进和准确的三维激光测量方式2020-04-21 3333
-
什么是数字化工厂如何打造数字化工厂2020-01-17 9568
-
智能工厂、数字化工厂与智能制造的区别2019-01-09 9093
-
整车三维扫描及其零部件三维扫描解决方案2018-08-21 3243
全部0条评论

快来发表一下你的评论吧 !
