

锁相环在相位检测中的应用指南
电子说
描述
使用Moku锁相放大器和相位表进行开环和闭环相位检测的选择指南
高精确度及高灵敏度相位检测在众多测试测量场景都至关重要。例如,测量电流和电压之间的相移可以显示设备或元件的复阻抗。可以通过光学干涉仪的控制臂和测量臂之间的相移来测量极小的位移。Liquid Instruments的Moku设备可以提供两种检测射频信号相位的仪器:锁相放大器和数字相位测量仪。在本应用说明中,我们将介绍这两个仪器的工作原理,并为不同的应用场景提供仪器选择指南。
介绍
锁相放大器和相位表(数字相位测量仪)是两种常用于从振荡信号中获取相位信息的仪器。锁相放大器可以被视为开环相位检测器。相位是由本地振荡器、混频器和低通滤波器直接计算出来的。相比而言,相位表则采用数字锁相环(PLL)作为其相位检测器,使用一个反馈信号来实时调节本地振荡器的频率。这可以被视为一种闭环相位检测方法。
在我们介绍这两种仪器之前,我们先来总结一下Moku:Pro锁相放大器和相位表(用于相位检测)的区别。请注意,本表中的参数规格是基于Moku:Pro的。

工作原理
锁相放大器原理
如图1所示,锁相放大器有三个关键组成部分:一个本地振荡器、一个混频器和一个低通滤波器。
图1: 锁相放大器的简化原理图
输入信号Vin和本地振荡器VLO可以用正弦和余弦函数来描述。
A1和A2代表振荡器的振幅。ωin和ωLO代表输入和本地振荡器的频率。∆ϕ 表示输入信号和本地振荡器之间的相位角差。混频器的输出Vmixer是输入和本地振荡器的产生的。
应用三角函数示意
假设 ωLO ≅ ωin= ω, Vmixer可写为
低通滤波器过滤掉了高频率分量sin(2×2ωt+∆j)。假设输入信号和本地振荡器的振幅是固定的,输出信号Vout可以表示为
在此有几个需要注意的地方:单相锁相放大器的输出与sin(∆ϕ)成正比,而不是与成正比。这大大限制了相位检测的线性动态范围,因为正弦函数是一个周期性的函数,它只在一个非常小的范围内提供(近乎)线性响应。另外,任何振幅的波动都可能引起一些系统误差。Liquid Instruments的Moku锁相放大器提供了双相解调的选项,可有效地区分了来自振幅和相位对输出的影响(可以通过此链接更深入了解双相位解调)但线性动态范围仍然限制在2π以内。另一方面,锁相放大器的数字信号处理(DSP)比相位表简单得多。这使锁相放大器能够以更高的速率处理数据,从而提供更宽的解调带宽。用户也可从外部设备输入一个本地振荡器作为参考,以直接测量两个振荡器之间的相对相位差。锁相放大器的开环特性确保仪器能够提供有效即时的响应,不容易受信号突变或损失造成的影响。因此,用户可使用锁相放大器测量接近或处于输入本底噪声的信号。
相位表/PLL 原理
相位表的核心相位检测单元是一个锁相环(PLL)。相位表的基本测量原理是将一个内部振荡器锁定在输入信号上,然后从内部振荡器的已知相位推断出输入信号的相位。图2显示了PLL的运作原理。锁相环的运作原理与锁相放大器非常相似,但有两个重要的区别:1)本地振荡器被一个压控振荡器(VCO)所取代;2)低通滤波器的输出反馈形成一个闭环。
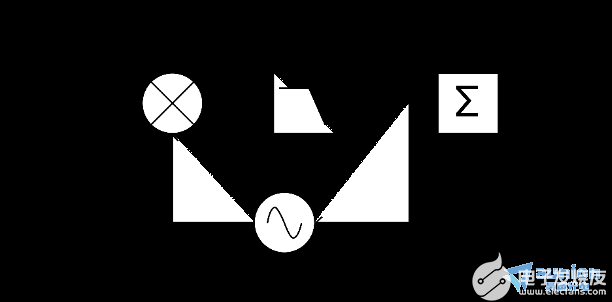
图2: 锁相环的简化原理图
VCO的输出 VVCO可以表述为
ωset是VCO的设定/中心频率。K是VCO的灵敏度 VCO, VVCOinput 是VCO的输入。AVCO是VCO的振幅。K和AVCO在正常工作时都保持不变。在不深入了解闭环控制理论的情况下,这种配置试图保持输入信号Vin和VCO之间的瞬时频率差为零。因此:
由于ωset和K都是基于已知的仪器设置,输入的频率可以根据VVCOinput来计算。同时,ωset在时间t的累积相位可以表示为
输入信号的累积相位可以用来近似表示。这里我们把K∙Vvcoinput项定义为ωdiff。
因此,输入信号和参考信号(振荡器在设定的频率下)之间的累积相位差可以通过测算环路的频率差/误差信号积分获取。
这种方法为相位检测提供了一个原生的相位解包支持,使输出与相位差呈线性关系。输入信号的瞬时频率也通过进行测量。此外,相位表有一个内置的二级振荡器来计算输入信号的振幅,类似于一个双相锁相放大器。除了来自环外积分器的相位,相位表的输出可以被设置为直接从数控振荡器(NCO;它可以被认为是数字的VCO)生成输入信号的正弦锁相副本,具有任意的振幅和可调相位。另一方面,输入和NCO之间的稳定锁定是PLL正常运行所必须的,不连续的输入可能会导致测量中断。由于这个原因,PLL在非常低的频率上保持稳定的锁定更具挑战性,相位表对比于锁相放大器在低载波频率边界更受限制,因此不建议用于测量接近输入本底噪声的信号。
应用中考量因素和演示
在本节中,我们将通过演示讨论在对Moku锁相放大器和相位表之间进行选择时的一些实际注意事项。
相位检测的线性动态范围
锁相放大器和相位表的关键区别之一是相位检测的线性动态范围。单相锁相放大器的相位线性动态范围小于π,双相锁相放大器则将这一极限推至2π。理论上,相位表可以跟踪无限的相位变化。在实践中,实际检测范围受用于表示相位的数字位长度的限制,在Moku:Pro上大约是16,000,000π。
在这个演示中,通过多仪器模式(MIM)(点此详细了解MIM)同时开启波形发生器、锁相放大器、相位表和示波器功能。一个10MHz的相位调制信号以单相和双相模式输入Moku:Pro的锁相放大器和相位表。相位检测的输出通过示波器进行记录。

图3:Moku:Pro上的MIM设置,用于测试不同相位检测器的线性动态范围。
归一化的相位输出(作为模拟信号)绘制成图4中相移的函数。从图4(a)来看,双相解调模式下的相位表和锁相放大器都在360°范围内提供线性相位响应。单相模式下的锁相放大器只提供了90°内的近线性响应。双相解调器将相位包裹在±180°,而PLL在整个720°的相位移动范围内持续线性输出(图4(b))。
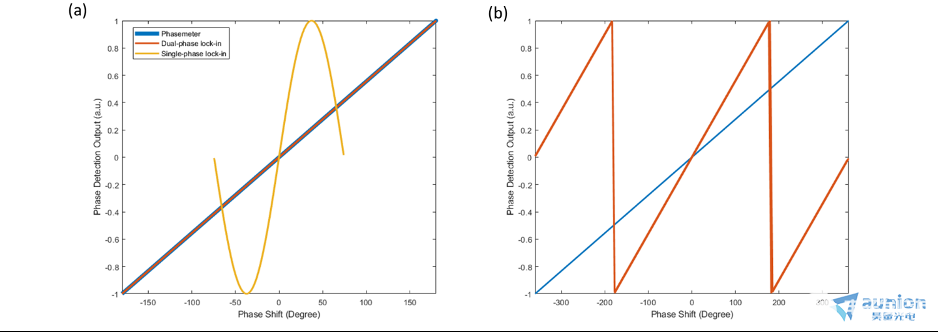
图4:Moku相位表的输出,锁相放大器在单、双相位模式下的输出在(a)360°和(b)720°的相移的函数。
使用相位表和锁相放大器测量两个外部信号之间的相位差
对于测量两个振荡信号之间的相对相移的应用,锁相放大器提供了一个更直接的检测方式。用户可以通过Moku锁相放大器直接输入一个参考信号作为本地振荡器来解调两个信号间的相位差。相位表的操作则需要一个板载振荡器作为绝对频率参考,因此检测的相位为信号与板载振荡器的相位差。
在这个演示中,一个频率调制(FM)的不稳定信号被送入锁相放大器作为信号和参考,而相位表作为信号,如图5(a)所示。在图5(b)中,调频引起的相位波动只在相位表(红色)上观察到,锁相放大器的输出保持不变(蓝色)。锁相放大器的输出为调频信号与其本身的实时相位差,因此是固定没有波动的。相位表检测的结果为调频信号与板载振荡器间的实时相位差,因此检测到的是调制的载波。
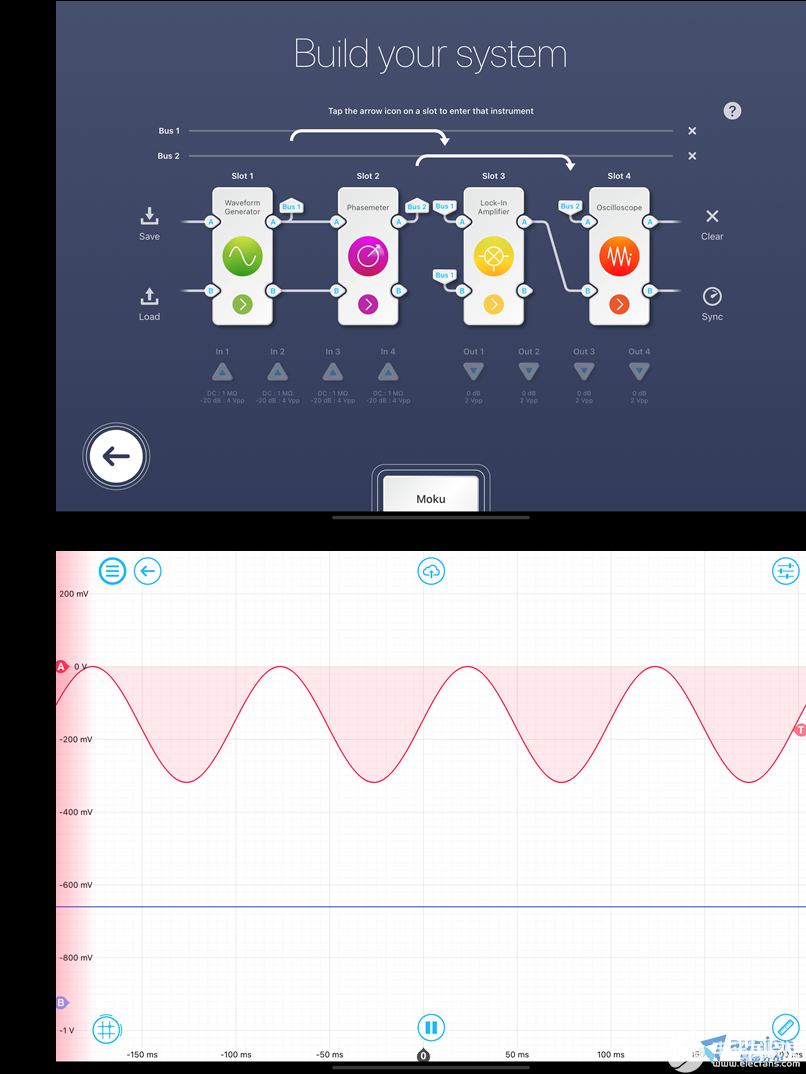
图5:(a)一个调频调制信号被接入到相位表的信号输入通道,以及锁相放大器的信号和参考输入。(b) 示波器上的相位表(红色)和锁相放大器(蓝色)的输出。
在此有两种方法可以用相位表测量两个振荡器之间的相对相位差。1) 两个输入信号之间的相位差可以通过 ∆ϕ1-∆ϕ2,来计算,其中∆ϕ1,2 代表输入到一个共同参考的相位差。图6中显示了一对具有180°相移的锁相正弦波使用相位表内置的数据记录监测用来记录 ∆ϕ1 (红色)、∆ϕ2 (蓝色)和 ∆ϕ1-∆ϕ2(橙色)。在两个输入通道上可以观察到恒定的相位漂移,但数学通道提供了输入之间的正确相位差。
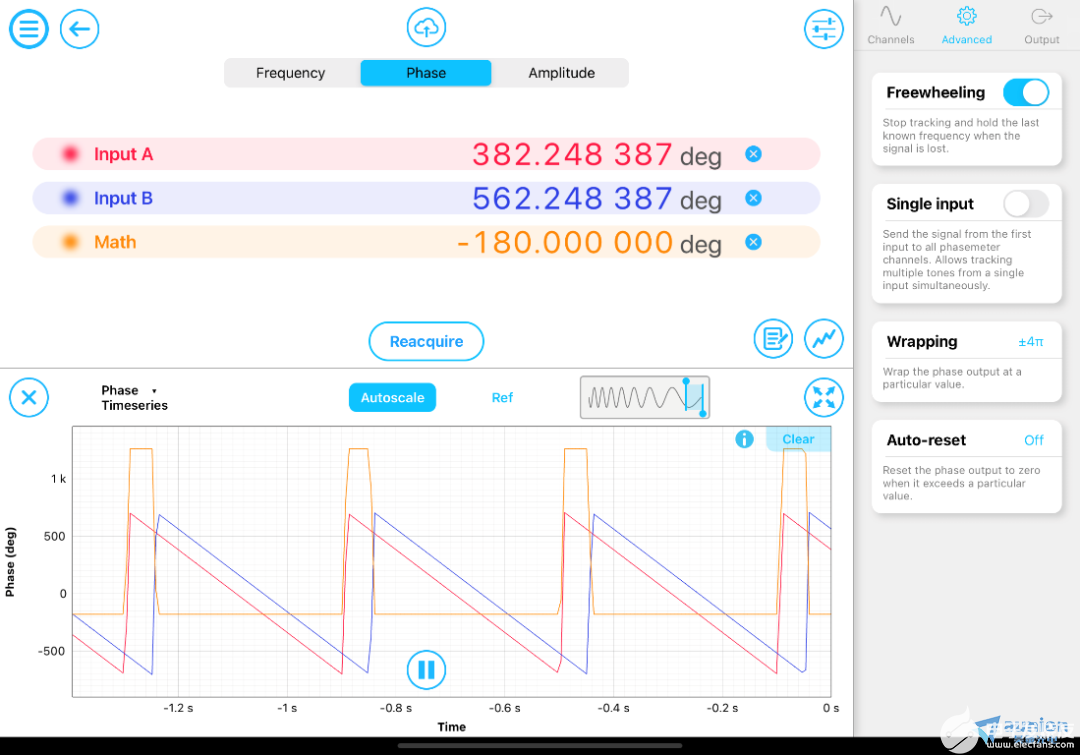
图6:一对具有180°相移的正弦波被接入相位表。数学通道中绘制出∆ϕ。
2) Moku:Lab和Moku:Pro的主时钟可以通过一个10 MHz的参考信号进行同步。如果参考振荡器可以与10 MHz同步,这就使得Moku:Pro上NCO的时基与参考相同。然而,时基同步并不能捕捉到参考NCO的任何参数调整(比如参考源是有目的地进行频率调制的)。另外,用于捕捉10MHz参考的PLL可能会给系统带来额外的噪声。除非需要通过模拟通道输出实时差异,否则不推荐使用这种方法。
测量接近本地噪声的信号
相位表要求输入信号和本地振荡器之间有稳定的锁定。Moku相位表有几个内置的安全机制来防止意外的变化对测试造成影响。例如,当锁定丢失时,"飞轮 "选项会自动将环路保持在最后的已知状态。另一方面,锁相放大器的输出在任何时候都是确定的。为了演示这一效果,一个正弦相位调制的信号被同时输入到锁相放大器和相位表上。然后,输入信号被切断约两秒钟,再打开。两个相位检测器的输出通过示波器进行记录。从图7中可以看出,重新连接信号后,相位表的输出(红色)急剧漂移。锁相放大器的输出(蓝色)在信号断开时保持在0,之后立即恢复到预期值。
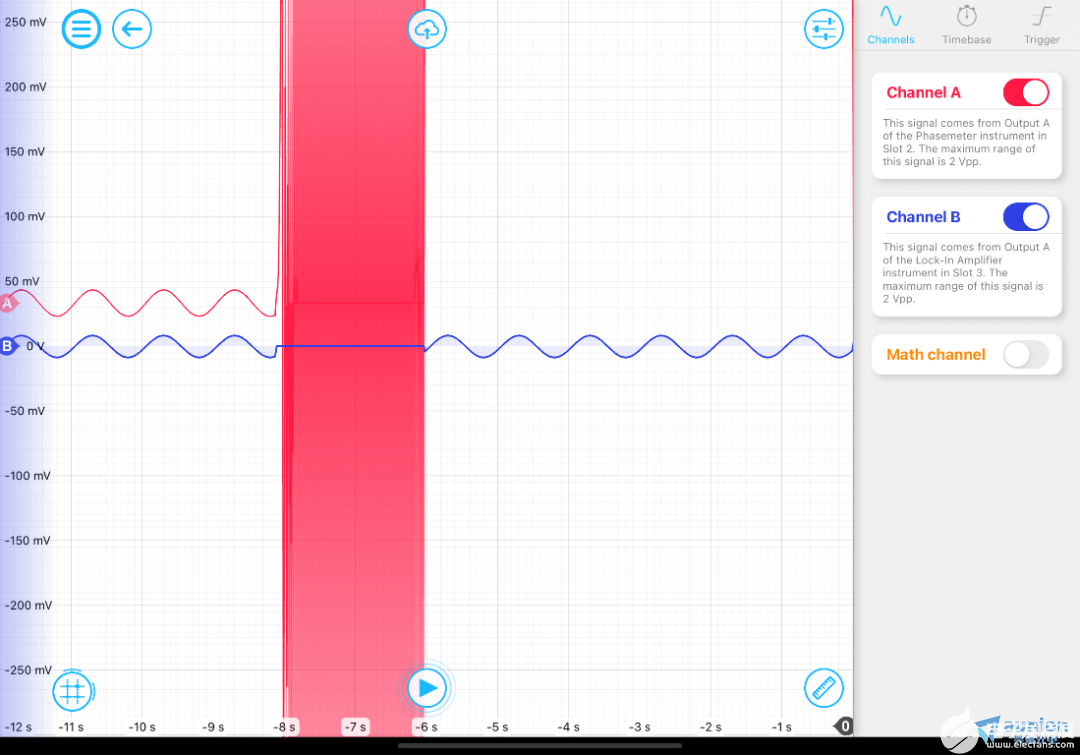
图7:示波器上记录了相位表(红色)和锁相放大器(蓝色)在信号突然丢失后的输出。
总结
Liquid Instruments的Moku:Lab和Moku:Pro的相位表和锁相放大器是为灵敏的相位检测应用提供的两种软件定义的仪器功能。相位表的闭环方法提供了特殊的线性动态范围,同时提供输入的频率、相位和振幅信息。锁相放大器算法相对简单,可以提供更快的响应速度,并且输出结果更容易预测。可以通过在Moku:Pro上部署多仪器并行,最多对四个输入在八个频率上进行相位检测,是多通道相位检测和锁相环应用的理想解决方案。
审核编辑:符乾江
-
锁相环相位噪声的影响因素2024-07-30 5428
-
锁相环的输入输出相位一致吗?2024-01-31 2893
-
什么是锁相环?PLL和DLL都是锁相环区别在哪里?2023-10-13 3593
-
锁相环是如何实现倍频的?2023-09-02 6191
-
模拟锁相环和数字锁相环区别2023-02-15 7059
-
锁相环在相位检测中的应用2022-06-21 2206
-
LabVIEW锁相环(PLL)2022-05-31 8149
-
MCU锁相环的相关资料分享2021-11-04 2084
-
锁相环相位噪声与环路带宽的关系是什么2021-06-07 2706
-
电荷泵锁相环电路锁定检测的基本原理,影响锁相环数字锁定电路的关键因子是什么?2021-04-20 3031
-
锁相环在电力系统中的应用2015-01-04 17807
-
模拟锁相环,模拟锁相环原理解析2010-03-23 6360
-
锁相环原理2007-08-21 5651
全部0条评论

快来发表一下你的评论吧 !
